CUDA学习笔记(十)内存访问
Memory Access Patterns(内存访问模式)
大部分device一开始从global Memory获取数据,而且,大部分GPU应用表现会被带宽限制。因此最大化应用对global Memory带宽的使用时获取高性能的第一步。也就是说,global Memory的使用就没调节好,其它的优化方案也获取不到什么大效果,下面的内容会涉及到不少L1的知识,这部分了解下就好,L1在Maxwell之后就不用了,但是cache的知识点是不变的。
Aligned and Coalesced Access(对齐和连续访问)
如下图所示,global Memory的load/store要经由cache,所有的数据会初始化在DRAM,也就是物理的device Memory上,而kernel能够获取的global Memory实际上是一块逻辑内存空间。Kernel对Memory的请求都是由DRAM和SM的片上内存以128-byte和32-byte传输解决的。
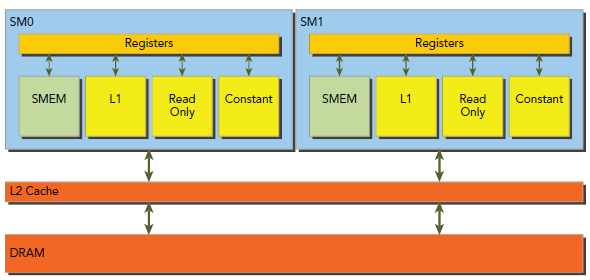
所有获取global Memory都要经过L2 cache,也有许多还要经过L1 cache,主要由GPU的架构和获取模式决定的。如果L1和L2都被使用,那么Memory的获取是以128-byte为单位传输的,如果只使用L2,则以32-byte为单位传输,在允许使用L1的GPU中(Maxwell已经彻底不使用L1,原本走L1都换成走texture cache),L1是可以在编译期被显示使用或禁止的。
由上文可知,L1 cache中每一行是128bytes,这些数据映射到device Memory上的128位对齐的块。如果warp中每个thread请求一个4-byte的值,那么每次请求会要求获取128 bytes值,正好契合cache line大小和device Memory segment大小。
因此,我们在设计代码的时候,有两个特征需要注意:
- Aligned Memory access 对齐
- Coalesced Memory access 连续
当要获取的Memory首地址是cache line的倍数时,就是Aligned Memory Access,如果是非对齐的,就会导致浪费带宽。至于Coalesced Memory Access则是warp的32个thread请求的是连续的内存块。
下图就是很好的符合了连续和对齐原则,只有128-byte Memory传输的消耗:
下图则没有遵守连续和对齐原则,有三次传输消耗发生,一次是从偏移地址0开始,一次是从偏移地址256开始,还有一次是从偏移128开始,而这次包含了大部分需要的数据,另外两次则有很多数据并不是需要的,而导致带宽浪费。

一般来讲,我们应该这样优化传输效率:使用最少的传输次数来满足最大的获取内存请求。当然,需要多少传输,多大的吞吐都是跟CC有关的。
Global Memory Reads
在SM中,数据运送是要经过下面三种cache/buffer的,主要依赖于要获取的device Memory种类:
- L1/L2 cache
- Constant cache
- Read-only cache
L1/L2是默认路径,另外两条路需要应用显示的说明,一般这样做都是为了提升性能(写CUDA代码的时候,可以先都使用global Memory,然后根据需要慢慢调节,使用一些特殊的内存来提升性能)。Global Memory的load操作是否经过L1cache可以有下面两个因素决定:
- Device compute capability(设备计算能力)
- Compiler options(编译选项)
默认情况下,L1是被开启的,-Xptxas -dlcm=cg可以用来禁用L1。L1被禁用后,所有去L1的都直接去L2了。当L2未命中时,就直接去DRAM。所有Memory transaction可能请求一个,两个或者四个segment,每个segment是32 bytes。当然L1也可以被显式的开启-Xptxas -dlcm=ca,此时,所有Memory请求都先走L1,未命中则去L2。在Kepler K10,K20和K20x系列GPU,L1不在用来cache global Memory,L1的唯一用途就是来cache由于register spill放到local Memory的那部分register。
Cache Loads
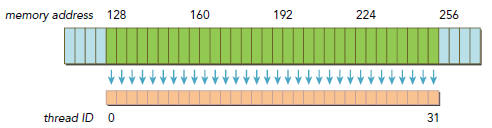
我们以默认开启L1为例,说明下对齐和连续,下图是理想的情况,连续且对齐,warp中所有thread的Memory请求都落在同一块cache line(128 bytes),只有一次传输消耗,没有任何多余的数据被传输,bus使用效率百分百。

下图是对齐但线程ID和地址不是连续一一对应的情况,不过由于所有数据仍然在一个连续对齐的块中,所有依然没有额外的传输消耗,我们仍然只需要一次128 bytes的传输就能完成。

下图则是非连续未对齐的情况,数据落在了两个128-byte的块中,所以就有两个128-byte的传输消耗,而其中有一半是无效数据,bus使用是百分之五十。

下图是最坏的情况,同样是请求32个4 bytes数据,但是每个地址分布的相当不规律,我们只想要需要的那128 bytes数据,但是,实际上下图这样的分布,却需要N∈(0,32)个cache line,也就是N次数据传输消耗。

CPU的L1 cache是根据时间和空间局部性做出的优化,但是GPU的L1仅仅被设计成针对空间局部性而不包括时间局部性。频繁的获取L1不会导致某些数据驻留在cache中,只要下次用不到,直接删。
Uncached Loads
这里就是指不走L1但是还是要走L2,也就是cache line从128-byte变为32-byte了。依然以上文warp 32个thread每个4 bytes请求,总计128 bytes为例,下图是理想的对齐且连续情形,所有的128 bytes都落在四块32 bytes的块中。

下图请求没有对齐,请求落在了160-byte范围内,bus有效使用率是百分之八十,相对使用L1,性能要好不少。

下图是所有thread都请求同一块数据的情形,bus有效使用率为4bytes/32bytes=12.5%,依然要比L1表现好。

下图是情况最糟糕的,数据非常分散,但是由于所请求的128 bytes落在了多个以32 bytes为单位的segment中,因此无效的数据传输要少的多。

因为L2以32bytes为一个传输单位,比L1划分的更细致,所以在数据传输中浪费的性能也更少。
Example of Misaligned Reads(未对齐读取的示例)
内存获取模式一般都是有应用的实现和算法来决定的,一些情况下,要满足连续内存是非常难的。但是对于对齐来说,是有一些方法来帮助应用实现的。
下面以代码来检验上述知识,kernel中多了一个k索引,是用来配置偏移地址的,通过他就可以配置对齐情况,只有在load两个数组A和B时才会使用k。对C的写操作则继续使用原来的代码,从而保证写操作 保持很好的对齐。
-
__global__ void readOffset(float *A, float *B, float *C, const int n,int offset) { -
unsigned int i = blockIdx.x * blockDim.x + threadIdx.x; -
unsigned int k = i + offset; -
if (k < n) C[i] = A[k] + B[k]; -
}
下面是main代码,offset默认是零:
-
int main(int argc, char **argv) { -
// set up device -
int dev = 0; -
cudaDeviceProp deviceProp; -
cudaGetDeviceProperties(&deviceProp, dev); -
printf("%s starting reduction at ", argv[0]); -
printf("device %d: %s ", dev, deviceProp.name); -
cudaSetDevice(dev); -
// set up array size -
int nElem = 1<<20; // total number of elements to reduce -
printf(" with array size %d\n", nElem); -
size_t nBytes = nElem * sizeof(float); -
// set up offset for summary -
int blocksize = 512; -
int offset = 0; -
if (argc>1) offset = atoi(argv[1]); -
if (argc>2) blocksize = atoi(argv[2]); -
// execution configuration -
dim3 block (blocksize,1); -
dim3 grid ((nElem+block.x-1)/block.x,1); -
// allocate host memory -
float *h_A = (float *)malloc(nBytes); -
float *h_B = (float *)malloc(nBytes); -
float *hostRef = (float *)malloc(nBytes); -
float *gpuRef = (float *)malloc(nBytes); -
// initialize host array -
initialData(h_A, nElem); -
memcpy(h_B,h_A,nBytes); -
// summary at host side -
sumArraysOnHost(h_A, h_B, hostRef,nElem,offset); -
// allocate device memory -
float *d_A,*d_B,*d_C; -
cudaMalloc((float**)&d_A, nBytes); -
cudaMalloc((float**)&d_B, nBytes); -
cudaMalloc((float**)&d_C, nBytes); -
// copy data from host to device -
cudaMemcpy(d_A, h_A, nBytes, cudaMemcpyHostToDevice); -
cudaMemcpy(d_B, h_A, nBytes, cudaMemcpyHostToDevice); -
// kernel 1: -
double iStart = seconds(); -
warmup <<< grid, block >>> (d_A, d_B, d_C, nElem, offset); -
cudaDeviceSynchronize(); -
double iElaps = seconds() - iStart; -
printf("warmup <<< %4d, %4d >>> offset %4d elapsed %f sec\n", -
grid.x, block.x, -
offset, iElaps); -
iStart = seconds(); -
readOffset <<< grid, block >>> (d_A, d_B, d_C, nElem, offset); -
cudaDeviceSynchronize(); -
iElaps = seconds() - iStart; -
printf("readOffset <<< %4d, %4d >>> offset %4d elapsed %f sec\n", -
grid.x, block.x, -
offset, iElaps); -
// copy kernel result back to host side and check device results -
cudaMemcpy(gpuRef, d_C, nBytes, cudaMemcpyDeviceToHost); -
checkResult(hostRef, gpuRef, nElem-offset); -
// copy kernel result back to host side and check device results -
cudaMemcpy(gpuRef, d_C, nBytes, cudaMemcpyDeviceToHost); -
checkResult(hostRef, gpuRef, nElem-offset); -
// copy kernel result back to host side and check device results -
cudaMemcpy(gpuRef, d_C, nBytes, cudaMemcpyDeviceToHost); -
checkResult(hostRef, gpuRef, nElem-offset); -
// free host and device memory -
cudaFree(d_A); -
cudaFree(d_B); -
cudaFree(d_C); -
free(h_A); -
free(h_B); -
// reset device -
cudaDeviceReset(); -
return EXIT_SUCCESS; -
}
编译运行:
-
$ nvcc -O3 -arch=sm_20 readSegment.cu -o readSegment -
$ ./readSegment 0 -
readOffset <<< 32768, 512 >>> offset 0 elapsed 0.001820 sec -
$ ./readSegment 11 -
readOffset <<< 32768, 512 >>> offset 11 elapsed 0.001949 sec -
$ ./readSegment 128 -
readOffset <<< 32768, 512 >>> offset 128 elapsed 0.001821 sec
当offset=11时,会导致从A和B load数据时不对齐。其运行时间消耗也是最大的,我们可以使用nvcc的gld_efficiency来检验一下:
-
$ nvprof --devices 0 --metrics gld_efficiency ./readSegment 0 -
$ nvprof --devices 0 --metrics gld_efficiency ./readSegment 11 -
$ nvprof --devices 0 --metrics gld_efficiency ./readSegment 128
输出:
-
Offset 0: gld_efficiency 100.00% -
Offset 11: gld_efficiency 49.81% -
Offset 128: gld_efficiency 100.00%
可以看到offset=11时,效率减半,可以预见其吞吐必然很高,也可以使用gld_transactions来检验:
$ nvprof --devices 0 --metrics gld_transactions ./readSegment $OFFSET
输出为:
-
Offset 0: gld_transactions 65184 -
Offset 11: gld_transactions 131039 -
Offset 128: gld_transactions 65744
然后我们使用-Xptxas -dlcm=cg来禁用L1,看一下直接使用L2的表现:
-
$ ./readSegment 0 -
readOffset <<< 32768, 512 >>> offset 0 elapsed 0.001825 sec -
$ ./readSegment 11 -
readOffset <<< 32768, 512 >>> offset 11 elapsed 0.002309 sec -
$ ./readSegment 128 -
readOffset <<< 32768, 512 >>> offset 128 elapsed 0.001823 sec
从该结果看出,未对齐的情况更糟糕了,然后看下gld_efficiency:
-
Offset 0: gld_efficiency 100.00% -
Offset 11: gld_efficiency 80.00% -
Offset 128: gld_efficiency 100.00%
因为L1被禁用后,每次load操作都是以32-byte为单位而不是128,所以无用数据会减少非常多。
这里未对齐反而情况变糟是一种特例,高Occupancy情况下,uncached会帮助提升bus有效使用率,而对于未对齐的情况,无用数据的传输将明显减少。
Read-Only Cache
最开始,read-only cache是用来为texture Memory load服务的,对于CC3.5以上,该cache可以替换L1(Maxwell之后,L1的功能完全就被这个cache取代了)。Read-only cache的单位是32 bytes,一般来讲是比L1要好用得多。
有两种方式来使用read-only cache:
- Using the function __ldg
- Using a declaration qualifier on the pointer being dereferenced(在指针被解除引用时使用声明限定符)
例如:
-
__global__ void copyKernel(int *out, int *in) { -
int idx = blockIdx.x * blockDim.x + threadIdx.x; -
out[idx] = in[idx]; -
}
改写后:
-
__global__ void copyKernel(int *out, int *in) { -
int idx = blockIdx.x * blockDim.x + threadIdx.x; -
out[idx] = __ldg(&in[idx]); -
}
或者使用 const __restrict__来修饰指针。该修饰符帮助nvcc编译器识别non-aliased指针,nvcc会自动使用该non-alias 指针从read-cache读出数据。
-
__global__ void copyKernel(int * __restrict__ out,const int * __restrict__ in) { -
int idx = blockIdx.x * blockDim.x + threadIdx.x; -
out[idx] = in[idx]; -
}
Global Memory Writes
写操作相对要简单的多,L1压根就不使用了。数据只会cache在L2中,所以写操作也是以32bytes为单位的。Memory transaction一次可以是一个、两个或四个segment。例如,如果两个地址落在了同一个128-byte的区域内,但是在不同的两个64-byte对齐的区域,一个四个segment的transaction就会被执行(也就是说,一个单独的4-segment的传输要比两次1-segment的传输性能好)。
下图是一个理想的情况,连续且对齐,只需要一次4 segment的传输:

下图是离散的情况,会由三次1-segment传输完成。

下图是对齐且地址在一个连续的64-byte范围内的情况,由一次2-segment传输完成:

Example of Misaligned Writes
再次修改代码,load变回使用i,而对C的写则使用k:
-
__global__ void writeOffset(float *A, float *B, float *C,const int n, int offset) { -
unsigned int i = blockIdx.x * blockDim.x + threadIdx.x; -
unsigned int k = i + offset; -
if (k < n) C[k] = A[i] + B[i]; -
}
修改host的计算函数;
-
void sumArraysOnHost(float *A, float *B, float *C, const int n,int offset) { -
for (int idx = offset, k = 0; idx < n; idx++, k++) { -
C[idx] = A[k] + B[k]; -
} -
}
编译运行:
-
$ nvcc -O3 -arch=sm_20 writeSegment.cu -o writeSegment -
$ ./writeSegment 0 -
writeOffset <<< 2048, 512 >>> offset 0 elapsed 0.000134 sec -
$ ./writeSegment 11 -
writeOffset <<< 2048, 512 >>> offset 11 elapsed 0.000184 sec -
$ ./writeSegment 128 -
writeOffset <<< 2048, 512 >>> offset 128 elapsed 0.000134 sec
显而易见,Misaligned表现最差,然后查看gld_efficiency:
-
$ nvprof --devices 0 --metrics gld_efficiency --metrics gst_efficiency ./writeSegment $OFFSET -
writeOffset Offset 0: gld_efficiency 100.00% -
writeOffset Offset 0: gst_efficiency 100.00% -
writeOffset Offset 11: gld_efficiency 100.00% -
writeOffset Offset 11: gst_efficiency 80.00% -
writeOffset Offset 128: gld_efficiency 100.00% -
writeOffset Offset 128: gst_efficiency 100.00%
除了offset=11的store外,所有load和store都是百分百。当offset=11时,128-bytes的写请求会被一个4-segment和一个1-segment的传输服务,因此,我们虽然需要写128bytes但是却有160bytes数据被load,从而导致百分之八十的效率。
Array of Structure versus Structure of Arrays
作为C程序员,我们应该熟悉两种组织数据的方式:array of structures(AoS)和structure of arrays(SoA)。二者的使用是一个有趣的话题,主要是数据排列组织。
观察下面代码,首先考虑该数据结构集合在使用AoS组织时,是怎样存储的:
-
struct innerStruct { -
float x; -
float y; -
}; -
struct innerStruct myAoS[N]; //每一对x和y的存储,空间上是连续的
然后是SoA:
-
struct innerArray { -
float x[N]; -
float y[N]; -
}; -
struct innerArray moa; //x和y是分别存储的,所有x和y是分别存储在两段不同的连续地址里。
下图显示了AoS和SoA在内存中的存储格式,当对x进行操作时,会导致一般的带宽浪费,因为在操作x时,y也会隐式的被load,而SoA的表现就要好得多,因为所有x都是相邻的。

许多并行编程规范里,特别是SIMD-style风格的规范,都更倾向于使用SoA,在CUDA C里,SoA也是非常建议使用的,因为数据已经预先排序连续了。
Example:Simple Math with the AoS Data Layout
-
__global__ void testInnerStruct(innerStruct *data,innerStruct *result, const int n) { -
unsigned int i = blockIdx.x * blockDim.x + threadIdx.x; -
if (i < n) { -
innerStruct tmp = data[i]; -
tmp.x += 10.f; -
tmp.y += 20.f; -
result[i] = tmp; -
} -
}
输入长度是1M,#define LEN 1<<20。
初始化数据:
-
void initialInnerStruct(innerStruct *ip, int size) { -
for (int i = 0; i < size; i++) { -
ip[i].x = (float)(rand() & 0xFF) / 100.0f; -
ip[i].y = (float)(rand() & 0xFF) / 100.0f; -
} -
return; -
}
Main代码:
-
int main(int argc, char **argv) { -
// set up device -
int dev = 0; -
cudaDeviceProp deviceProp; -
cudaGetDeviceProperties(&deviceProp, dev); -
printf("%s test struct of array at ", argv[0]); -
printf("device %d: %s \n", dev, deviceProp.name); -
cudaSetDevice(dev); -
// allocate host memory -
int nElem = LEN; -
size_t nBytes = nElem * sizeof(innerStruct); -
innerStruct *h_A = (innerStruct *)malloc(nBytes); -
innerStruct *hostRef = (innerStruct *)malloc(nBytes); -
innerStruct *gpuRef = (innerStruct *)malloc(nBytes); -
// initialize host array -
initialInnerStruct(h_A, nElem); -
testInnerStructHost(h_A, hostRef,nElem); -
// allocate device memory -
innerStruct *d_A,*d_C; -
cudaMalloc((innerStruct**)&d_A, nBytes); -
cudaMalloc((innerStruct**)&d_C, nBytes); -
// copy data from host to device -
cudaMemcpy(d_A, h_A, nBytes, cudaMemcpyHostToDevice); -
// set up offset for summary -
int blocksize = 128; -
if (argc>1) blocksize = atoi(argv[1]); -
// execution configuration -
dim3 block (blocksize,1); -
dim3 grid ((nElem+block.x-1)/block.x,1); -
// kernel 1: warmup -
double iStart = seconds(); -
warmup <<< grid, block >>> (d_A, d_C, nElem); -
cudaDeviceSynchronize(); -
double iElaps = seconds() - iStart; -
printf("warmup <<< %3d, %3d >>> elapsed %f sec\n",grid.x, -
block.x,iElaps); -
cudaMemcpy(gpuRef, d_C, nBytes, cudaMemcpyDeviceToHost); -
checkInnerStruct(hostRef, gpuRef, nElem); -
// kernel 2: testInnerStruct -
iStart = seconds(); -
testInnerStruct <<< grid, block >>> (d_A, d_C, nElem); -
cudaDeviceSynchronize(); -
iElaps = seconds() - iStart; -
printf("innerstruct <<< %3d, %3d >>> elapsed %f sec\n",grid.x, -
block.x,iElaps); -
cudaMemcpy(gpuRef, d_C, nBytes, cudaMemcpyDeviceToHost); -
checkInnerStruct(hostRef, gpuRef, nElem); -
// free memories both host and device -
cudaFree(d_A); -
cudaFree(d_C); -
free(h_A); -
free(hostRef); -
free(gpuRef); -
// reset device -
cudaDeviceReset(); -
return EXIT_SUCCESS; -
}
编译运行(Fermi M2070):
-
$ nvcc -O3 -arch=sm_20 simpleMathAoS.cu -o simpleMathAoS -
$ ./simpleMathAoS -
innerStruct <<< 8192, 128 >>> elapsed 0.000286 sec
查看load和store性能:
-
$ nvprof --devices 0 --metrics gld_efficiency,gst_efficiency ./simpleMathAoS -
gld_efficiency 50.00% -
gst_efficiency 50.00%
正如预期那样,都只达到了一般,因为额外那部分消耗都用来load/store 另一个元素了,而这部分不是我们需要的。
Example:Simple Math with the SoA Data Layout
-
__global__ void testInnerArray(InnerArray *data,InnerArray *result, const int n) { -
unsigned int i = blockIdx.x * blockDim.x + threadIdx.x; -
if (i -
float tmpx = data->x[i]; -
float tmpy = data->y[i]; -
tmpx += 10.f; -
tmpy += 20.f; -
result->x[i] = tmpx; -
result->y[i] = tmpy; -
} -
}
分配global Memory:
-
int nElem = LEN; -
size_t nBytes = sizeof(InnerArray); -
InnerArray *d_A,*d_C; -
cudaMalloc((InnerArray **)&d_A, nBytes); -
cudaMalloc((InnerArray **)&d_C, nBytes);
编译运行:
-
$ nvcc -O3 -arch=sm_20 simpleMathSoA.cu -o simpleSoA -
$ ./simpleSoA -
innerArray <<< 8192, 128 >>> elapsed 0.000200 sec
查看load/store性能:
-
$ nvprof --devices 0 --metrics gld_efficiency,gst_efficiency ./simpleMathSoA -
gld_efficiency 100.00% -
gst_efficiency 100.00%
Performance Tuning
调节device Memory带宽利用性能时,主要是力求达到下面两个目标:
- Aligned and Coalesced Memory accesses that reduce wasted bandwidth(对齐和连续内存访问可减少浪费的带宽)
- Sufficient concurrent Memory operations to hide Memory latency(足够的并发内存操作来隐藏内存延迟)
Unrolling Techniques
展开循环可以增加更多的独立的Memory操作,我们在之前博文有详细介绍如何展开loop,考虑之前的redSegment的例子,我们修改下readOffset来使每个thread执行四个独立Memory操作,就像下面那样:
-
__global__ void readOffsetUnroll4(float *A, float *B, float *C,const int n, int offset) { -
unsigned int i = blockIdx.x * blockDim.x * 4 + threadIdx.x; -
unsigned int k = i + offset; -
if (k + 3 * blockDim.x < n) { -
C[i] = A[k] -
C[i + blockDim.x] = A[k + blockDim.x] + B[k + blockDim.x]; -
C[i + 2 * blockDim.x] = A[k + 2 * blockDim.x] + B[k + 2 * blockDim.x]; -
C[i + 3 * blockDim.x] = A[k + 3 * blockDim.x] + B[k + 3 * blockDim.x]; -
} -
}
编译运行(可能需要使用-Xptxas -dlcm=ca来启用L1):
-
$ ./readSegmentUnroll 0 -
warmup <<< 32768, 512 >>> offset 0 elapsed 0.001990 sec -
unroll4 <<< 8192, 512 >>> offset 0 elapsed 0.000599 sec -
$ ./readSegmentUnroll 11 -
warmup <<< 32768, 512 >>> offset 11 elapsed 0.002114 sec -
unroll4 <<< 8192, 512 >>> offset 11 elapsed 0.000615 sec -
$ ./readSegmentUnroll 128 -
warmup <<< 32768, 512 >>> offset 128 elapsed 0.001989 sec -
unroll4 <<< 8192, 512 >>> offset 128 elapsed 0.000598 sec
我们看到,unrolling技术会对性能有巨大影响,比地址对齐影响还大。对于这类I/O-bound的kernel,提高内存获取的并行性对性能提升的影响,有更高的优先级。不过,我们应该看到,对齐的test比未对齐的test表现依然要好。
Unrolling并不能影响内存操作的总数目(只是影响并行的操作数目),我们可以查看下相关属性:
-
$ nvprof --devices 0 --metrics gld_efficiency,gst_efficiency ./readSegmentUnroll 11 -
readOffset gld_efficiency 49.69% -
readOffset gst_efficiency 100.00% -
readOffsetUnroll4 gld_efficiency 50.79% -
readOffsetUnroll4 gst_efficiency 100.00% -
$ nvprof --devices 0 --metrics gld_transactions,gst_transactions -
./readSegmentUnroll 11 -
readOffset gld_transactions 132384 -
readOffset gst_transactions 32928 -
readOffsetUnroll4 gld_transactions 33152 -
readOffsetUnroll4 gst_transactions 8064
Exposing More Parallelism
这方面就是调整grid和block的配置,下面是加上unrolling后的结果:
-
$ ./readSegmentUnroll 0 1024 22 -
unroll4 <<< 1024, 1024 >>> offset 0 elapsed 0.000169 sec -
$ ./readSegmentUnroll 0 512 22 -
unroll4 <<< 2048, 512 >>> offset 0 elapsed 0.000159 sec -
$ ./readSegmentUnroll 0 256 22 -
unroll4 <<< 4096, 256 >>> offset 0 elapsed 0.000157 sec -
$ ./readSegmentUnroll 0 128 22 -
unroll4 <<< 8192, 128 >>> offset 0 elapsed 0.000158 sec
表现最好的是block配置256 thread的kernel,虽然128thread会增加并行性,但是依然比256少那么一点点性能,这个主要是CC版本对应的资源限制决定的,以本代码为例,Fermi每个SM最多有8个block,每个SM能够并行的的warp是48个,当使用128个thread(per block)时,每个block中有4个warp,因为每个SM最多8个block能够同时运行,因此该kernel每个SM最多只能有32个warp,还有16个warp的计算性能没用上,所以性能差了就,可以使用Occupancy来验证下。