- 算法及数据结构系列 - 动态规划
诺亚凹凸曼
算法及数据结构算法数据结构动态规划
系列文章目录算法及数据结构系列-二分查找算法及数据结构系列-BFS算法文章目录框架思路子序列问题解题模板一维dp数组二维dp数组经典题型322.零钱兑换暴力递归带备忘录的暴力递归动态规划300.最长上升子序列1143.最长公共子序列72.编辑距离框架思路动态规划问题的一般形式就是求最值。动态规划其实是运筹学的一种最优化方法,只不过在计算机问题上应用比较多,比如说求最长递增子序列,最小编辑距离等等。
- 使用 Selenium 控制现有 Edge 窗口以规避爬虫检测
秋叶原の黑猫
数据库
在网络爬虫开发中,网站的防爬机制常常会检测自动化工具(如Selenium)启动的浏览器实例。为了绕过这种检测,一种有效的方法是利用Selenium连接到手动打开的现有浏览器窗口,而不是每次都启动一个新的实例。本文将详细介绍如何使用Selenium控制现有的MicrosoftEdge浏览器窗口,并结合代码示例展示实现过程。1.背景介绍:为什么需要控制现有窗口?传统的Selenium脚本会通过WebD
- 一文读懂什么是服务器
小熊猫Q
服务器科普服务器运维
服务器基础介绍介绍服务器相关基础知识,如服务器分类、组成、机箱内部构造等,个人公众号:SRE杂谈,欢迎关注1、什么是服务器?服务器品牌有惠普、戴尔、浪潮、华为、华三、曙光等,各厂商服务器型号存在差异,惠普DL380G10、戴尔PowerEdgeR750、浪潮NF5280M5、华为2288HV5、曙光R6230HA一般用SN序列号和资产编号来对服务器进行标识,其中SN为唯一标识2、服务器演进2.1、
- CBNetV2: A Composite Backbone Network Architecture for Object Detection论文阅读
Laughing-q
论文阅读深度学习人工智能目标检测实例分割transformer
CBNetV2:ACompositeBackboneNetworkArchitectureforObjectDetection论文阅读介绍方法CBNetV2融合方式对Assistant的监督实验与SOTA的比较在主流backbone架构上的通用性与更宽更深的网络比较与可变形卷积的兼容在主流检测器上的模型适用性在SwinTransformer上的模型适用性消融实验paper:https://arxi
- 使用Python和LangChain构建检索增强生成(RAG)应用的详细指南
m0_57781768
pythonlangchain搜索引擎
使用Python和LangChain构建检索增强生成(RAG)应用的详细指南引言在人工智能和自然语言处理领域,利用大语言模型(LLM)构建复杂的问答(Q&A)系统是一个重要应用。检索增强生成(RetrievalAugmentedGeneration,RAG)是一种技术,通过将模型知识与额外数据结合来增强LLM的能力,使其能够回答关于特定源信息的问题。这些应用不仅限于公开数据,还可以处理私有数据和模
- 探索Python中的集成方法:Stacking
Echo_Wish
Python笔记Python算法python开发语言
在机器学习领域,Stacking是一种高级的集成学习方法,它通过将多个基本模型的预测结果作为新的特征输入到一个元模型中,从而提高整体模型的性能和鲁棒性。本文将深入介绍Stacking的原理、实现方式以及如何在Python中应用。什么是Stacking?Stacking,又称为堆叠泛化(StackedGeneralization),是一种模型集成方法,与Bagging和Boosting不同,它并不直
- c++ 红黑树
gezhengxu2024
教程c++开发语言c++
红黑树(Red-BlackTree)是一种自平衡的二叉查找树,它是由节点的颜色和结构性质来维持平衡的。红黑树的形成可以追溯到1972年,由RudolfBayer提出,并由Guibas和Sedgewick进一步完善。红黑树的作用主要在于提供高效的插入、删除和查找操作。它通过保持以下五个性质来实现平衡:每个节点是红色或黑色。根节点是黑色。每个叶子节点(NIL节点)是黑色。如果一个节点是红色,那么它的两
- 开发浏览器插件(chrome、edge)
LLLL96
浏览器插件chrome前端浏览器插件下载图片
开发浏览器插件是一个有趣且富有挑战性的项目,可以让你扩展浏览器的功能,提升用户的浏览体验。今天就带大家写一个最简单的下载页面图片的插件。因为chrome和edge使用相同内核,所以开发一款插件,2个浏览器都能用准备工作chrome-要求最新版idea-为什么使用idea,当然是因为代码高亮方便开发开发新建项目file->new->project选择EmptyProject,Name填写chrome
- 设计模式-抽象工厂模式(Abstract Factory Pattern)结构|原理|优缺点|场景|示例
TsengOnce
设计模式抽象工厂模式java
设计模式(分类)设计模式(六大原则)创建型(5种)工厂方法抽象工厂模式单例模式建造者模式原型模式结构型(7种)适配器模式装饰器模式代理模式外观模式桥接模式组合模式享元模式行为型(11种)策略模式模板方法模式观察者模式迭代器模式责任链模式命令模式备忘录模式状态模式访问者模式中介者模式抽象工厂模式(AbstractFactoryPattern)是一种创建型设计模式,它提供了一个创建一系列相关或相互依赖
- 知识蒸馏:让大模型“瘦身“而不失智慧的魔术
一休哥助手
人工智能人工智能
引言:当AI模型需要"减肥"在人工智能领域,一个有趣的悖论正在上演:大模型的参数规模每年以10倍速度增长,而移动设备的算力却始终受限。GPT-4的1750亿参数需要价值500万美元的GPU集群运行,但现实中的智能设备可能只有指甲盖大小。这种矛盾催生了一项神奇的技术——知识蒸馏(KnowledgeDistillation),它就像给AI模型进行"脑外科手术",将庞然大物的智慧浓缩到轻量模型中。第一章
- html 中加载pdf,在HTML中嵌入PDF的推荐方法?
梧桐应恨夜来霜
html中加载pdf
GeorgeMahar..9我们的问题是,出于法律原因,我们不允许在硬盘上临时存储PDF.此外,在浏览器中将PDF显示为"预览"时,不应重新加载整个页面.首先我们尝试了PDF.jS.它适用于Firefox和Chrome浏览器中的Base64.但是,我们的PDF格式慢得令人无法接受.IE/Edge根本不起作用.因此,我们在HTML对象标记中使用Base64字符串进行了尝试.这再次对IE/Edge不起
- golang-嵌套结构体
lmryBC49
golang开发语言后端
结构体嵌套golang中没有类,他通过结构体来实现其他编程语言中类的相关功能。具名结构体基本语法基本语法golang的结构体嵌套特别简单。type结构体类型1struct{字段类型1字段类型2}//这样就实现了结构体的嵌套type结构体类型2struct{字段类型1字段类型2字段结构体类型1}举例packagestruct_knowledgeimport"fmt"typeWorkerstruct{
- golang-方法
lmryBC49
golang开发语言后端
方法概述方法是给类型增加的,通过类型实例.方法名()调用。例如我们用自定义类型保存了整数,我们想给该类型的变量都增加一个方法可以直接判断该数是不是奇数。packagemethod_knowledgeimport"fmt"//案例1:给Myint自定义类型添加奇数判断方法typeMyintintfunc(aMyint)IsOdd(){if(a%2==0){fmt.Println("a不是奇数")}e
- 备忘录二 数组模拟邻接表
AugustineDiane
c++图论算法
constintN=1010,M=1010;inth[N],e[M],w[M],nxt[M],eidx;voidadd(intu,intv,intweight)//添加有向边u->v,权重为weight{e[eidx]=v;//记录边的终点w[eidx]=weight;//记录边的权重nxt[eidx]=h[u];//将下一条边指向结点u此时的第一条边h[u]=eidx;//将结点u的第一条边的编
- 常见经典目标检测算法
109702008
人工智能#深度学习目标检测人工智能
ChatGPT目标检测(ObjectDetection)是计算机视觉领域的一个重要分支,其目的是识别数字图像中的不同对象,并给出它们的位置和类别。近年来,许多经典的目标检测算法被提出并广泛应用。以下是一些常见的经典目标检测算法:1.R-CNN(RegionswithCNNfeatures):R-CNN通过使用区域提议方法(如选择性搜索)首先生成潜在的边界框,然后使用卷积神经网络(CNN)提取特征,
- (备忘) manjaro更换内核后 virtualBox 中打不开虚拟机(已经解决)
波格斯特
问题备忘linux内核
文章目录问题描述解决办法参考链接1问题描述更换完5.9内核后VirtualBox提示Kerneldrivernotinstalled(rc=-1908)"TheVirtualBoxLinuxkerneldriveriseithernotloadedornotsetupcorrectly.Pleasetrysettingitupagainbyexecuting'/sbin/vboxconfig'as
- 【图论】数组模拟邻接表存储(链式前向星)
ars4me
图论数据结构图论邻接表前向星
图的邻接表存储法又叫链式存储法可以用数组模拟定义structedge{intnext;//下一条边的编号intto;//这条边到达的点intdis;//这条边的长度}edge[size];//COYG核心代码加入一条从from到to距离为dis的单向边inlinevoidadd(intfrom,intto,intdis){edge[++num].next=head[from];edge[num].
- 论文学习11:Boundary-Guided Camouflaged Object Detection
zl29
学习目标检测人工智能
代码来源GitHub-thograce/BGNet:Boundary-GuidedCamouflagedObjectDetection模块作用BGNet利用额外的目标相关边缘语义信息来引导COD任务的特征学习,从而强制模型生成能够突出目标结构的特征。这一机制有助于提高目标边界的精准定位,从而提升伪装目标的检测性能。模块结构BGNet的架构基于Res2Net-50,编码器提取多级特征,解码器通过EA
- 知识管理系统:构建企业智慧大脑
AI天才研究院
ChatGPTAI大模型企业级应用开发实战DeepSeekR1&大数据AI人工智能大模型大厂Offer收割机面试题简历程序员读书硅基计算碳基计算认知计算生物计算深度学习神经网络大数据AIGCAGILLMJavaPython架构设计Agent程序员实现财富自由
第一部分:知识管理概述与重要性第1章:知识管理的定义与基本概念1.1.1知识管理的起源与发展知识管理(KnowledgeManagement,KM)起源于20世纪80年代,当时企业在市场竞争中逐渐意识到知识作为一种战略资源的重要性。早期的知识管理实践主要集中在知识的收集、存储和传播上。随着信息技术的发展,知识管理逐渐融入了更先进的技术手段,如数据挖掘、人工智能和大数据分析,使其成为一个跨学科、多领
- pytesseract
Claroja
图像识别tesseract
方法get_tesseract_version,返回tesseract的版本.image_to_string,返回识别的字符串image_to_boxes,返回字符和位置image_to_data,返回边框,置信度和其他的信息,可以参考TesseractTSVimage_to_osd,返回orientationandscriptdetection参数imageObject,PILImage/Num
- AI学习指南RAG篇(24)-RAGFlow的社区与开源贡献
俞兆鹏
AI学习指南人工智能
一、引言RAGFlow是一款基于深度文档理解的开源RAG(Retrieval-AugmentedGeneration,检索增强生成)引擎,旨在解决现有RAG技术在数据处理和生成答案方面的挑战。RAGFlow通过结合大型语言模型(LLMs)的强大生成能力和高效的信息检索系统,为用户提供了一种全新的交互体验。本文将鼓励读者参与到RAGFlow的开源社区中,共同推动技术的发展和创新。二、RAGFlow的
- 聊聊langchain4j的Naive RAG
langchain4j
序本文主要研究一下langchain4j的NaiveRAG示例publicclassNaive_RAG_Example{/***ThisexampledemonstrateshowtoimplementanaiveRetrieval-AugmentedGeneration(RAG)application.*By"naive",wemeanthatwewon'tuseanyadvancedRAGte
- 基于Puppeteer与Selenium的跨浏览器自动化测试全攻略——从环境搭建到实战优化,万字详解自动化测试落地
追寻向上
selenium测试工具
自动化测试的价值与工具选型为什么需要自动化测试?效率提升:减少重复人工操作,回归测试耗时降低80%精准覆盖:支持高频次、多场景、多设备验证质量保障:避免人为疏忽导致的漏测问题Puppeteer与Selenium的互补性Puppeteer:专精Chrome生态,适用于高性能截图、动态渲染、复杂交互场景Selenium:支持多浏览器(Firefox/Safari/Edge),适合跨平台兼容性测试协同方
- Opencv计算机视觉编程攻略-第一节 图像读取与基本处理
weixin_44242403
深度学习opencv计算机视觉
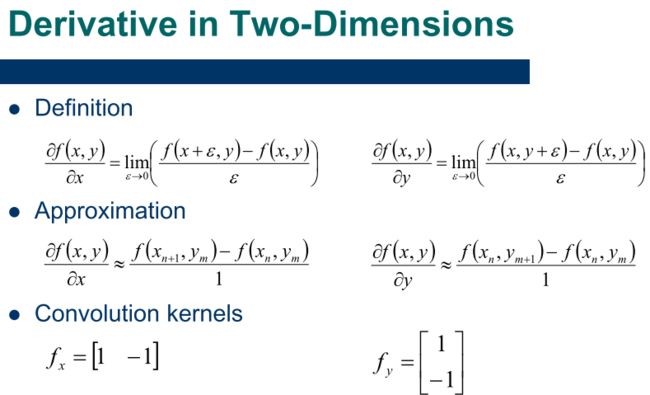
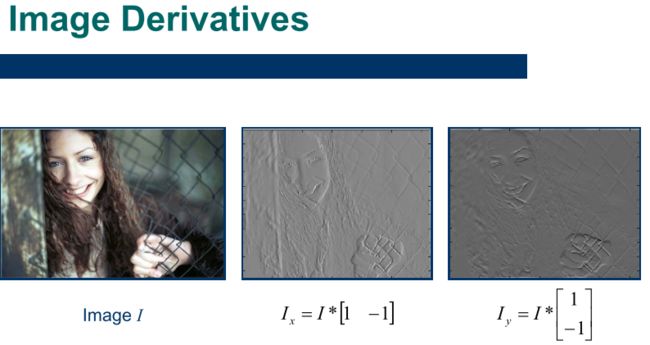
1.图像读取导入依赖项的h文件#include#include#include#include项目Valuecore.hpp基础数据结构和操作(图像存储、矩阵运算、文件I/O)highgui.hpp图像显示、窗口管理、用户交互(图像/视频显示、用户输入处理、结果保存)imgproc.hpp图像处理算法(图像滤波、几何变换、边缘检测、形态学操作)二读取图片Matimage;//图像矩阵std::co
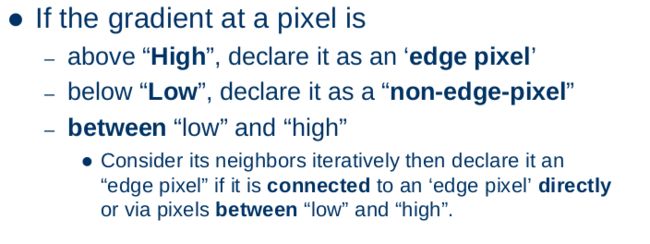
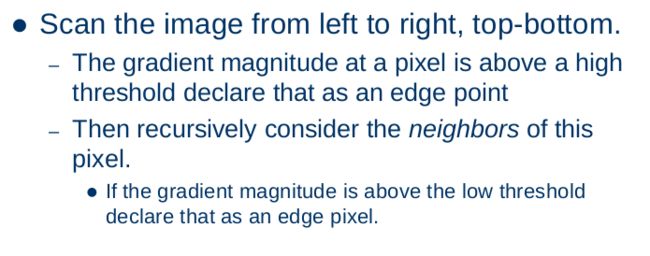
- 图像处理篇---图像预处理
Ronin-Lotus
图像处理篇深度学习篇程序代码篇图像处理人工智能opencvpython深度学习计算机视觉
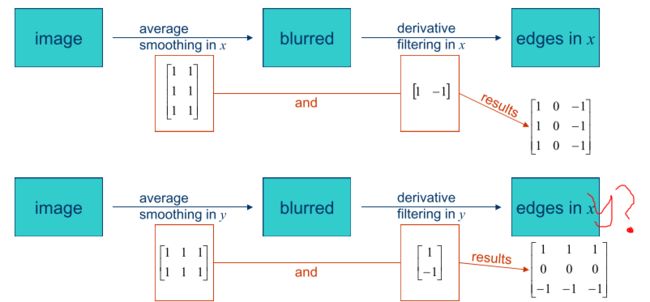
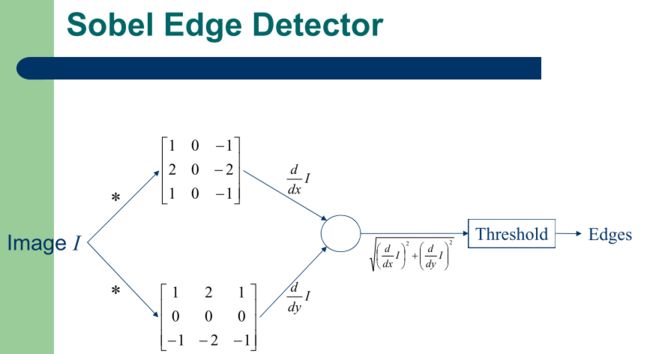
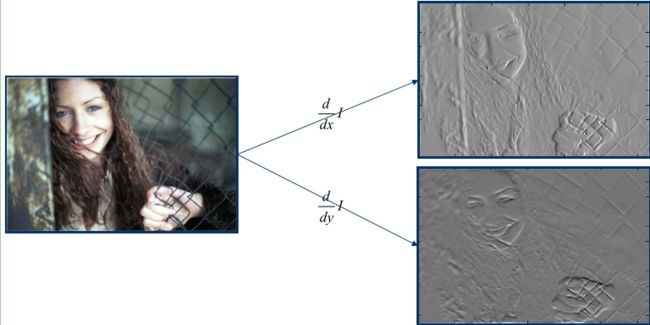
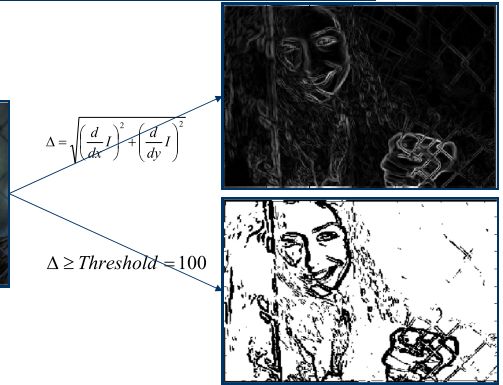
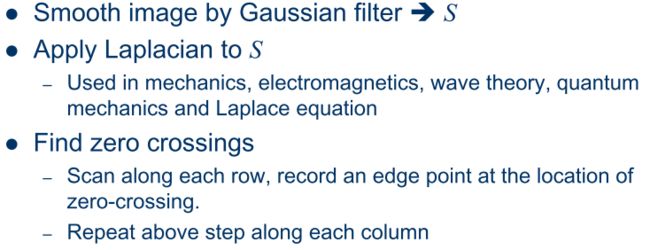
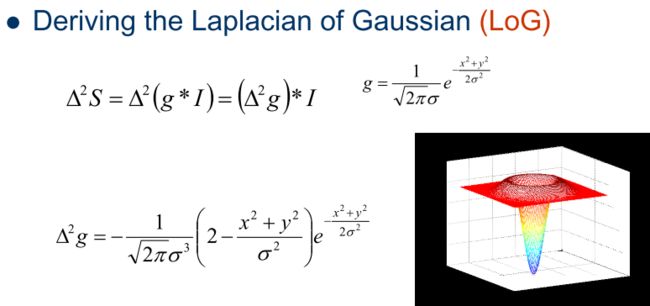
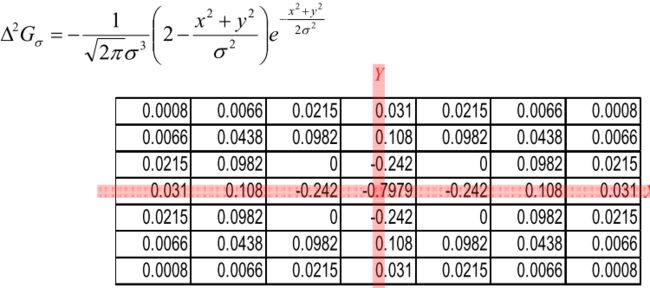
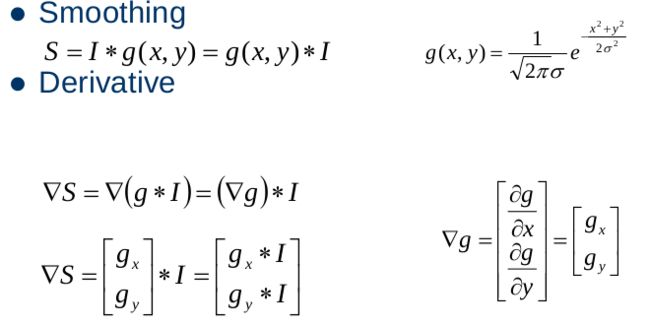
文章目录前言一、通用目的1.1数据标准化目的实现1.2噪声抑制目的实现高斯滤波中值滤波双边滤波1.3尺寸统一化目的实现1.4数据增强目的实现1.5特征增强目的实现:边缘检测直方图均衡化锐化二、分领域预处理2.1传统机器学习(如SVM、随机森林)2.1.1特点2.1.2预处理重点灰度化二值化形态学操作特征工程2.2深度学习(如CNN、Transformer)2.2.1特点2.2.2预处理重点通道顺序
- 机器视觉中图像的腐蚀和膨胀是什么意思?它能用来做什么?
yuanpan
机器学习人工智能计算机视觉图像处理
腐蚀(Erosion)和膨胀(Dilation)是两种基本的形态学操作,通常用于二值图像(黑白图像)的处理。它们是形态学图像处理的基础,广泛应用于图像分割、边缘检测、噪声去除等任务。1.腐蚀(Erosion)腐蚀操作通过对图像中的前景区域(通常为白色像素)进行“收缩”来去除边界上的像素。具体来说,腐蚀操作使用一个结构元素(通常是一个小的矩阵或核)在图像上滑动,只有当结构元素完全覆盖前景区域时,中心
- 清晰易懂的Python安装与配置教程
Tee xm
python开发语言
初学者也能看懂的Python安装与配置教程本教程将手把手教你安装Python,并配置国内镜像源和自定义依赖包缓存位置,即使你是零基础小白,也能轻松完成!一、准备工作操作系统:Windows10/11、macOS或Linux。下载工具:浏览器(推荐Chrome或Edge)。存储空间:至少预留500MB可用空间。二、安装Python1.下载Python访问Python官网下载页面:https://ww
- 清晰易懂的Java8安装教程
Tee xm
windowsjava
小白也能看懂的Java8安装教程(JDK和JRE分目录安装)本教程将手把手教你如何在Windows系统上安装Java8(JDK1.8),并将JDK和JRE安装到不同的目录中,同时提供国内Java8下载源和方法。即使你是编程小白,也能轻松学会!一、准备工作操作系统:Windows10或更高版本。下载工具:一个浏览器(如Chrome、Edge)。存储空间:确保你的电脑有至少500MB的可用空间。二、下
- 医图论文 CVPR‘24 | 适应医学图像中泛化异常检测的视觉-语言模型
小白学视觉
医学图像处理论文解读语言模型人工智能计算机视觉医学图像顶会医学图像处理CVPR论文解读
论文信息题目:AdaptingVisual-LanguageModelsforGeneralizableAnomalyDetectioninMedicalImages适应医学图像中泛化异常检测的视觉-语言模型作者:ChaoqinHuang,AofanJiang,JinghaoFeng,YaZhang,XinchaoWang,YanfengWang源码:https://github.com/Medi
- 5G时代新基建:边缘节点如何将云计算响应速度提升300%“
云上的阿七
5G云计算
随着5G技术的普及,云计算正在迈向一个全新的阶段。传统云计算模式虽然提供了强大的算力和存储能力,但由于数据中心与用户终端的物理距离,网络时延问题始终是一个挑战。为了解决这一问题,边缘计算应运而生,并成为5G时代新基建的重要组成部分。本文将探讨边缘节点如何结合5G技术,将云计算响应速度提升300%,为企业和用户带来更流畅的数字体验。边缘计算的核心优势边缘计算(EdgeComputing)是一种分布式
- rust的指针作为函数返回值是直接传递,还是先销毁后创建?
wudixiaotie
返回值
这是我自己想到的问题,结果去知呼提问,还没等别人回答, 我自己就想到方法实验了。。
fn main() {
let mut a = 34;
println!("a's addr:{:p}", &a);
let p = &mut a;
println!("p's addr:{:p}", &a
- java编程思想 -- 数据的初始化
百合不是茶
java数据的初始化
1.使用构造器确保数据初始化
/*
*在ReckInitDemo类中创建Reck的对象
*/
public class ReckInitDemo {
public static void main(String[] args) {
//创建Reck对象
new Reck();
}
}
- [航天与宇宙]为什么发射和回收航天器有档期
comsci
地球的大气层中有一个时空屏蔽层,这个层次会不定时的出现,如果该时空屏蔽层出现,那么将导致外层空间进入的任何物体被摧毁,而从地面发射到太空的飞船也将被摧毁...
所以,航天发射和飞船回收都需要等待这个时空屏蔽层消失之后,再进行
&
- linux下批量替换文件内容
商人shang
linux替换
1、网络上现成的资料
格式: sed -i "s/查找字段/替换字段/g" `grep 查找字段 -rl 路径`
linux sed 批量替换多个文件中的字符串
sed -i "s/oldstring/newstring/g" `grep oldstring -rl yourdir`
例如:替换/home下所有文件中的www.admi
- 网页在线天气预报
oloz
天气预报
网页在线调用天气预报
<%@ page language="java" contentType="text/html; charset=utf-8"
pageEncoding="utf-8"%>
<!DOCTYPE html PUBLIC "-//W3C//DTD HTML 4.01 Transit
- SpringMVC和Struts2比较
杨白白
springMVC
1. 入口
spring mvc的入口是servlet,而struts2是filter(这里要指出,filter和servlet是不同的。以前认为filter是servlet的一种特殊),这样就导致了二者的机制不同,这里就牵涉到servlet和filter的区别了。
参见:http://blog.csdn.net/zs15932616453/article/details/8832343
2
- refuse copy, lazy girl!
小桔子
copy
妹妹坐船头啊啊啊啊!都打算一点点琢磨呢。文字编辑也写了基本功能了。。今天查资料,结果查到了人家写得完完整整的。我清楚的认识到:
1.那是我自己觉得写不出的高度
2.如果直接拿来用,很快就能解决问题
3.然后就是抄咩~~
4.肿么可以这样子,都不想写了今儿个,留着作参考吧!拒绝大抄特抄,慢慢一点点写!
- apache与php整合
aichenglong
php apache web
一 apache web服务器
1 apeche web服务器的安装
1)下载Apache web服务器
2)配置域名(如果需要使用要在DNS上注册)
3)测试安装访问http://localhost/验证是否安装成功
2 apache管理
1)service.msc进行图形化管理
2)命令管理,配
- Maven常用内置变量
AILIKES
maven
Built-in properties
${basedir} represents the directory containing pom.xml
${version} equivalent to ${project.version} (deprecated: ${pom.version})
Pom/Project properties
Al
- java的类和对象
百合不是茶
JAVA面向对象 类 对象
java中的类:
java是面向对象的语言,解决问题的核心就是将问题看成是一个类,使用类来解决
java使用 class 类名 来创建类 ,在Java中类名要求和构造方法,Java的文件名是一样的
创建一个A类:
class A{
}
java中的类:将某两个事物有联系的属性包装在一个类中,再通
- JS控制页面输入框为只读
bijian1013
JavaScript
在WEB应用开发当中,增、删除、改、查功能必不可少,为了减少以后维护的工作量,我们一般都只做一份页面,通过传入的参数控制其是新增、修改或者查看。而修改时需将待修改的信息从后台取到并显示出来,实际上就是查看的过程,唯一的区别是修改时,页面上所有的信息能修改,而查看页面上的信息不能修改。因此完全可以将其合并,但通过前端JS将查看页面的所有信息控制为只读,在信息量非常大时,就比较麻烦。
- AngularJS与服务器交互
bijian1013
JavaScriptAngularJS$http
对于AJAX应用(使用XMLHttpRequests)来说,向服务器发起请求的传统方式是:获取一个XMLHttpRequest对象的引用、发起请求、读取响应、检查状态码,最后处理服务端的响应。整个过程示例如下:
var xmlhttp = new XMLHttpRequest();
xmlhttp.onreadystatechange
- [Maven学习笔记八]Maven常用插件应用
bit1129
maven
常用插件及其用法位于:http://maven.apache.org/plugins/
1. Jetty server plugin
2. Dependency copy plugin
3. Surefire Test plugin
4. Uber jar plugin
1. Jetty Pl
- 【Hive六】Hive用户自定义函数(UDF)
bit1129
自定义函数
1. 什么是Hive UDF
Hive是基于Hadoop中的MapReduce,提供HQL查询的数据仓库。Hive是一个很开放的系统,很多内容都支持用户定制,包括:
文件格式:Text File,Sequence File
内存中的数据格式: Java Integer/String, Hadoop IntWritable/Text
用户提供的 map/reduce 脚本:不管什么
- 杀掉nginx进程后丢失nginx.pid,如何重新启动nginx
ronin47
nginx 重启 pid丢失
nginx进程被意外关闭,使用nginx -s reload重启时报如下错误:nginx: [error] open() “/var/run/nginx.pid” failed (2: No such file or directory)这是因为nginx进程被杀死后pid丢失了,下一次再开启nginx -s reload时无法启动解决办法:nginx -s reload 只是用来告诉运行中的ng
- UI设计中我们为什么需要设计动效
brotherlamp
UIui教程ui视频ui资料ui自学
随着国际大品牌苹果和谷歌的引领,最近越来越多的国内公司开始关注动效设计了,越来越多的团队已经意识到动效在产品用户体验中的重要性了,更多的UI设计师们也开始投身动效设计领域。
但是说到底,我们到底为什么需要动效设计?或者说我们到底需要什么样的动效?做动效设计也有段时间了,于是尝试用一些案例,从产品本身出发来说说我所思考的动效设计。
一、加强体验舒适度
嗯,就是让用户更加爽更加爽的用你的产品。
- Spring中JdbcDaoSupport的DataSource注入问题
bylijinnan
javaspring
参考以下两篇文章:
http://www.mkyong.com/spring/spring-jdbctemplate-jdbcdaosupport-examples/
http://stackoverflow.com/questions/4762229/spring-ldap-invoking-setter-methods-in-beans-configuration
Sprin
- 数据库连接池的工作原理
chicony
数据库连接池
随着信息技术的高速发展与广泛应用,数据库技术在信息技术领域中的位置越来越重要,尤其是网络应用和电子商务的迅速发展,都需要数据库技术支持动 态Web站点的运行,而传统的开发模式是:首先在主程序(如Servlet、Beans)中建立数据库连接;然后进行SQL操作,对数据库中的对象进行查 询、修改和删除等操作;最后断开数据库连接。使用这种开发模式,对
- java 关键字
CrazyMizzz
java
关键字是事先定义的,有特别意义的标识符,有时又叫保留字。对于保留字,用户只能按照系统规定的方式使用,不能自行定义。
Java中的关键字按功能主要可以分为以下几类:
(1)访问修饰符
public,private,protected
p
- Hive中的排序语法
daizj
排序hiveorder byDISTRIBUTE BYsort by
Hive中的排序语法 2014.06.22 ORDER BY
hive中的ORDER BY语句和关系数据库中的sql语法相似。他会对查询结果做全局排序,这意味着所有的数据会传送到一个Reduce任务上,这样会导致在大数量的情况下,花费大量时间。
与数据库中 ORDER BY 的区别在于在hive.mapred.mode = strict模式下,必须指定 limit 否则执行会报错。
- 单态设计模式
dcj3sjt126com
设计模式
单例模式(Singleton)用于为一个类生成一个唯一的对象。最常用的地方是数据库连接。 使用单例模式生成一个对象后,该对象可以被其它众多对象所使用。
<?phpclass Example{ // 保存类实例在此属性中 private static&
- svn locked
dcj3sjt126com
Lock
post-commit hook failed (exit code 1) with output:
svn: E155004: Working copy 'D:\xx\xxx' locked
svn: E200031: sqlite: attempt to write a readonly database
svn: E200031: sqlite: attempt to write a
- ARM寄存器学习
e200702084
数据结构C++cC#F#
无论是学习哪一种处理器,首先需要明确的就是这种处理器的寄存器以及工作模式。
ARM有37个寄存器,其中31个通用寄存器,6个状态寄存器。
1、不分组寄存器(R0-R7)
不分组也就是说说,在所有的处理器模式下指的都时同一物理寄存器。在异常中断造成处理器模式切换时,由于不同的处理器模式使用一个名字相同的物理寄存器,就是
- 常用编码资料
gengzg
编码
List<UserInfo> list=GetUserS.GetUserList(11);
String json=JSON.toJSONString(list);
HashMap<Object,Object> hs=new HashMap<Object, Object>();
for(int i=0;i<10;i++)
{
- 进程 vs. 线程
hongtoushizi
线程linux进程
我们介绍了多进程和多线程,这是实现多任务最常用的两种方式。现在,我们来讨论一下这两种方式的优缺点。
首先,要实现多任务,通常我们会设计Master-Worker模式,Master负责分配任务,Worker负责执行任务,因此,多任务环境下,通常是一个Master,多个Worker。
如果用多进程实现Master-Worker,主进程就是Master,其他进程就是Worker。
如果用多线程实现
- Linux定时Job:crontab -e 与 /etc/crontab 的区别
Josh_Persistence
linuxcrontab
一、linux中的crotab中的指定的时间只有5个部分:* * * * *
分别表示:分钟,小时,日,月,星期,具体说来:
第一段 代表分钟 0—59
第二段 代表小时 0—23
第三段 代表日期 1—31
第四段 代表月份 1—12
第五段 代表星期几,0代表星期日 0—6
如:
*/1 * * * * 每分钟执行一次。
*
- KMP算法详解
hm4123660
数据结构C++算法字符串KMP
字符串模式匹配我们相信大家都有遇过,然而我们也习惯用简单匹配法(即Brute-Force算法),其基本思路就是一个个逐一对比下去,这也是我们大家熟知的方法,然而这种算法的效率并不高,但利于理解。
假设主串s="ababcabcacbab",模式串为t="
- 枚举类型的单例模式
zhb8015
单例模式
E.编写一个包含单个元素的枚举类型[极推荐]。代码如下:
public enum MaYun {himself; //定义一个枚举的元素,就代表MaYun的一个实例private String anotherField;MaYun() {//MaYun诞生要做的事情//这个方法也可以去掉。将构造时候需要做的事情放在instance赋值的时候:/** himself = MaYun() {*
- Kafka+Storm+HDFS
ssydxa219
storm
cd /myhome/usr/stormbin/storm nimbus &bin/storm supervisor &bin/storm ui &Kafka+Storm+HDFS整合实践kafka_2.9.2-0.8.1.1.tgzapache-storm-0.9.2-incubating.tar.gzKafka安装配置我们使用3台机器搭建Kafk
- Java获取本地服务器的IP
中华好儿孙
javaWeb获取服务器ip地址
System.out.println("getRequestURL:"+request.getRequestURL());
System.out.println("getLocalAddr:"+request.getLocalAddr());
System.out.println("getLocalPort:&quo


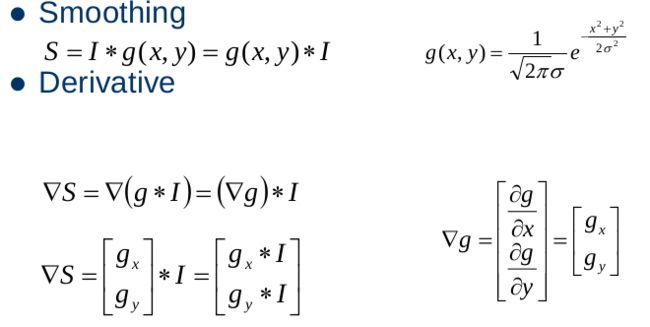
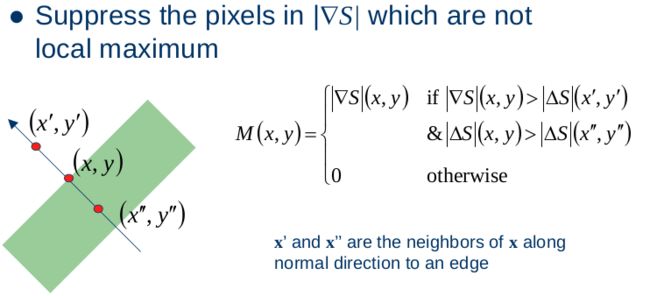 图片数学公式中的delta全部换成梯度符号
图片数学公式中的delta全部换成梯度符号