介绍
归一化层,主要有这几种方法,BatchNorm(2015年)、LayerNorm(2016年)、InstanceNorm(2016年)、GroupNorm(2018年);
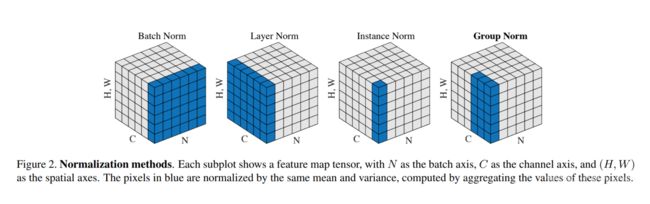
将输入的图像shape记为[N,C,H,W],这几个方法主要区别是:
BatchNorm:batch方向做归一化,计算NHW的均值,对小batchsize效果不好;
(BN主要缺点是对batchsize的大小比较敏感,由于每次计算均值和方差是在一个batch上,所以如果batchsize太小,则计算的均值、方差不足以代表整个数据分布)LayerNorm:channel方向做归一化,计算CHW的均值;
(对RNN作用明显)InstanceNorm:一个batch,一个channel内做归一化。计算HW的均值,用在风格化迁移;
(因为在图像风格化中,生成结果主要依赖于某个图像实例,所以对整个batch归一化不适合图像风格化中,因而对HW做归一化。可以加速模型收敛,并且保持每个图像实例之间的独立。)GroupNorm:将channel方向分group,然后每个group内做归一化,算(C//G)HW的均值;这样与batchsize无关,不受其约束。
1. BatchNorm详解
torch.nn.BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
torch.nn.BatchNorm3d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
参数:
num_features:输入的特征数,该期望输入的大小为’N x C [x L]’
eps: 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。
momentum: 动态均值和动态方差所使用的动量。默认为0.1。
affine: 布尔值,当设为true,给该层添加可学习的仿射变换参数。
track_running_stats:布尔值,当设为true,记录训练过程中的均值和方差;
实现公式:
# 示例代码
import torch
import torch.nn as nn
"""
BatchNorm1d(时域)
Input: (N, C) or (N, C, L)
Output: (N, C) or (N, C, L)(same shape as input)
"""
# input = torch.randn(2, 10, 100)
input = torch.randn(2, 10)
# with learnable parameters
m1 = nn.BatchNorm1d(10)
# without learnable parameters
m2 = nn.BatchNorm1d(10, affine=False)
output1 = m1(input)
print(output1.shape)
output2 = m2(input)
print(output2.shape)
"""
BatchNorm2d(空域)
Input: (N, C, H, W)
Output: (N, C, H, W)(same shape as input)
"""
input = torch.randn(2, 10, 35, 45)
# with learnable parameters
m1 = nn.BatchNorm2d(10)
# without learnable parameters
m2 = nn.BatchNorm2d(10)
output1 = m1(input)
print(output1.shape)
output2 = m2(input)
print(output2.shape)
"""
BatchNorm3d(时空域)
Input: (N, C, D, H, W)
Output: (N, C, D, H, W)(same shape as input)
"""
input = torch.randn(2, 10, 20, 35, 45)
# with leanable parameters
m1 = nn.BatchNorm3d(10)
# without learnable parameters
m2 = nn.BatchNorm3d(10)
output1 = m1(input)
print(output1.shape)
output2 = m2(input)
print(output2.shape)
# 结果
torch.Size([2, 10])
torch.Size([2, 10])
torch.Size([2, 10, 35, 45])
torch.Size([2, 10, 35, 45])
torch.Size([2, 10, 20, 35, 45])
torch.Size([2, 10, 20, 35, 45])
2. GroupNorm详解
torch.nn.GroupNorm(num_groups, num_channels, eps=1e-05, affine=True)
参数:
num_groups:需要划分的groups
num_features:输入的特征数,输入的大小为’N x C x *’
eps: 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5
momentum: 动态均值和动态方差所使用的动量。默认为0.1
affine: 布尔值,当设为true,给该层添加可学习的仿射变换参数
实现公式:
# 示例代码
"""
GroupNorm
Input: (N, C, *)where C=num_channels
Output: (N, C, *)(same shape as input)
"""
input = torch.randn(2, 6, 10, 10)
# separate 6 channels into 3 groups
m1 = nn.GroupNorm(3, 6)
# Separate 6 channels into 6 groups (equivalent with InstanceNorm)
m2 = nn.GroupNorm(6, 6)
# Put all 6 channels into a single group (equivalent with LayerNorm)
m3 = nn.GroupNorm(1, 6)
output1 = m1(input)
print(output1.shape)
output2 = m2(input)
print(output2.shape)
output3 = m3(input)
print(output3.shape)
# 结果
torch.Size([2, 6, 10, 10])
torch.Size([2, 6, 10, 10])
torch.Size([2, 6, 10, 10])
3. InstanceNorm详解
torch.nn.InstanceNorm1d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
torch.nn.InstanceNorm2d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
torch.nn.InstanceNorm3d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
参数:
num_features:输入的特征数,输入的大小为’N x C [x L]’
eps:为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5
momentum: 动态均值和动态方差所使用的动量。默认为0.1
affine: 布尔值,当设为true,给该层添加可学习的仿射变换参数
track_running_stats:布尔值,当设为true,记录训练过程中的均值和方差;
实现公式:
# 示例代码
"""
InstanceNorm1d
Input: (N, C, L)
Output: (N, C, L)(same shape as input)
"""
input = torch.randn(20, 100, 40)
# without learnable parameters
m1 = nn.InstanceNorm1d(100)
# with learnable parameters
m2 = nn.InstanceNorm1d(100, affine=True)
output1 = m1(input)
print(output1.shape)
output2 = m2(input)
print(output2.shape)
"""
InstanceNorm2d
Input: (N, C, H, W)
Output: (N, C, H, W)(same shape as input)
"""
input = torch.randn(20, 100, 35, 45)
# without learnable parameters
m1 = nn.InstanceNorm2d(100)
# with learnable parameters
m2 = nn.InstanceNorm2d(100, affine=True)
output1 = m1(input)
print(output1.shape)
output2 = m2(input)
print(output2.shape)
"""
InstanceNorm3d
Input: (N, C, D, H, W)
Output: (N, C, D, H, W)(same shape as input)
"""
input = torch.randn(20, 100, 35, 45)
# without learnable parameters
m1 = nn.InstanceNorm2d(100)
# with learnable parameters
m2 = nn.InstanceNorm2d(100, affine=True)
output1 = m1(input)
print(output1.shape)
output2 = m2(input)
print(output2.shape)
# 结果
torch.Size([20, 100, 40])
torch.Size([20, 100, 40])
torch.Size([20, 100, 35, 45])
torch.Size([20, 100, 35, 45])
torch.Size([20, 100, 35, 45])
torch.Size([20, 100, 35, 45])
4. LayerNorm详解
torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True)
参数:
normalized_shape:输入尺寸
[∗×normalized_shape[0]×normalized_shape[1]×…×normalized_shape[−1]]
eps:为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。
elementwise_affine:布尔值,当设为true,给该层添加可学习的仿射变换参数
实现公式:
# 示例代码
"""
LayerNorm
Input: (N, *)
Output: (N, *)(same shape as input)
"""
input = torch.randn(20, 5, 10, 10)
# with learnable parameters
m1 = nn.LayerNorm(input.size()[1:])
# without learnable parameters
m2 = nn.LayerNorm(input.size()[1:], elementwise_affine=False)
# normalize over last two dimensions
m3 = nn.LayerNorm([10, 10])
# normalize over last dimension of size 10
m4 = nn.LayerNorm(10)
output1 = m1(input)
print(output1.shape)
output2 = m2(input)
print(output2.shape)
output3 = m3(input)
print(output3.shape)
output4 = m4(input)
print(output4.shape)
# 结果
torch.Size([20, 5, 10, 10])
torch.Size([20, 5, 10, 10])
torch.Size([20, 5, 10, 10])
torch.Size([20, 5, 10, 10])
论文链接
- BatchNorm
https://arxiv.org/pdf/1502.03167.pdf- LayerNorm
https://arxiv.org/pdf/1607.06450v1.pdf- InstanceNorm
https://arxiv.org/pdf/1607.08022.pdf- GroupNorm
https://arxiv.org/pdf/1803.08494.pdf- SwitchableNorm
https://arxiv.org/pdf/1806.10779.pdf