视觉SLAM位姿估计(总结)
文章目录
- Features Based Method
- 2D-2D: Epipolar Geometry
- 3D-2D: PnP
- Bundle Adjustment
- 3D-3D: ICP
- 线性代数方式
- Optical Flow
- LK光流
- 分类
- 讨论
- Direct Method
- 参考文献
相关代码:
- pose_estimation in cggos/slam_park_cg
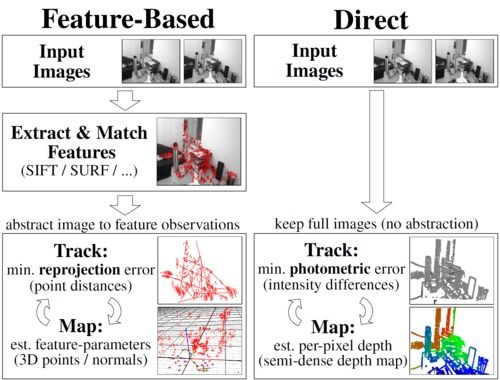
Features Based Method
2D-2D: Epipolar Geometry
2D-2D 对极几何 主要涉及到基础矩阵、本质矩阵和单应性矩阵的求解,并从中恢复出旋转矩阵 R R R 和平移向量 t t t。
- 计算机视觉对极几何之FEH
同时,还要根据匹配的特征点和计算出的相对位姿进行三角化,恢复出 3D空间点。
- 计算机视觉对极几何之Triangulate(三角化)
在单目视觉SLAM中,以上过程主要用于SLAM的初始化:计算第二关键帧的相对位姿(假设第一帧位姿为 [ I 0 ] [I \quad 0] [I0]),并计算初始Map。
OpenCV 中相关函数:
- findFundamentalMat
- findEssentialMat
- findHomography
- recoverPose
- decomposeEssentialMat
- triangulatePoints
相关参考代码:
vector pts1;
vector pts2;
for ( int i = 0; i < ( int ) matches.size(); i++ ) {
pts1.push_back(keypoints_1[matches[i].queryIdx].pt);
pts2.push_back(keypoints_2[matches[i].trainIdx].pt);
}
Mat matF = findFundamentalMat(pts1, pts2, CV_FM_8POINT);
double cx = K.at(0,2);
double cy = K.at(1,2);
double fx = K.at(0,0);
Mat matE = findEssentialMat(pts1, pts2, fx, Point2d(cx,cy));
Mat matH = findHomography(pts1, pts2, RANSAC, 3);
recoverPose(matE, pts1, pts2, R, t, fx, Point2d(cx,cy));
3D-2D: PnP
Perspective-n-Point is the problem of estimating the pose of a calibrated camera given a set of n 3D points in the world and their corresponding 2D projections in the image. [Wikipedia]
PnP(Perspective-n-Point) 是求解3D到2D点对运动的方法,求解PnP问题目前主要有直接线性变换(DLT)、P3P、EPnP、UPnP以及非线性优化方法。
在双目或RGB-D的视觉里程计中,可以直接使用PnP估计相机运动;而在单目视觉里程计中,必须先进行初始化,然后才能使用PnP。
在SLAM中,通常先使用 P3P或EPnP 等方法估计相机位姿,再构建最小二乘优化问题对估计值进行调整(BA)。
Bundle Adjustment
把 PnP问题 构建成一个定义于李代数上的非线性最小二乘问题,求解最好的相机位姿。
定义 残差(观测值-预测值)或 重投影误差
r ( ξ ) = u − K exp ( ξ ∧ ) P r(\xi) = u - K \exp({\xi}^{\wedge}) P r(ξ)=u−Kexp(ξ∧)P
构建最小二乘问题
ξ ∗ = arg min ξ 1 2 ∑ i = 1 n ∥ r ( ξ ) ∥ 2 2 {\xi}^* = \arg \min_\xi \frac{1}{2} \sum_{i=1}^{n} {\| r(\xi) \| }_2^2 ξ∗=argξmin21i=1∑n∥r(ξ)∥22
细节可参考 应用: 基于李代数的视觉SLAM位姿优化
OpenCV 中相关函数:
- solvePnP
- Rodrigues
相关参考代码:
vector kpts_1, kpts_2;
vector matches;
find_feature_matches ( img_1, img_2, kpts_1, kpts_2, matches );
vector pts_3d;
vector pts_2d;
for ( DMatch m : matches ) {
int x1 = int(kpts_1[m.queryIdx].pt.x);
int y1 = int(kpts_1[m.queryIdx].pt.y);
ushort d = img_d.ptr(y1)[x1];
if (d == 0) // bad depth
continue;
float dd = d / depth_scale;
Point2d p1 = pixel2cam(kpts_1[m.queryIdx].pt, K);
pts_3d.push_back(Point3f(p1.x * dd, p1.y * dd, dd));
pts_2d.push_back(kpts_2[m.trainIdx].pt);
}
Mat om, t;
solvePnP ( pts_3d, pts_2d, K, Mat(), om, t, false, SOLVEPNP_EPNP );
Mat R;
cv::Rodrigues ( om, R ); // rotation vector to rotation matrix
bundle_adjustment_3d2d ( pts_3d, pts_2d, K, R, t );
3D-3D: ICP
对于3D-3D的位姿估计问题可以用 ICP(Iterative Closest Point) 求解,其求解方式分为两种:
- 线性代数方式(主要是 SVD)
- 非线性优化方式(类似于BA)
线性代数方式
根据ICP问题,建立第 i i i 对点的误差项
e i = P i − ( R ⋅ P ′ i + t ) e_i = P_i - (R \cdot {P'}_i + t) ei=Pi−(R⋅P′i+t)
构建最小二乘问题,求使误差平方和达到极小的 R , t R, t R,t
min R , t J = 1 2 ∑ i = 1 n ∥ e i ∥ 2 2 \min_{R,t} J = \frac{1}{2} \sum_{i=1}^{n} {\| e_i \|}_2^2 R,tminJ=21i=1∑n∥ei∥22
对目标函数处理,最终为
min R , t J = 1 2 ∑ i = 1 n ( ∥ P i − P c − R ( P ′ i − P ′ c ) ∥ 2 + ∥ P c − R P ′ c − t ∥ 2 ) \min_{R,t} J = \frac{1}{2} \sum_{i=1}^{n} ( {\| P_i - P_c - R({P'}_i-{P'}_c) \|}^2 + {\| P_c - R{P'}_c - t \|}^2 ) R,tminJ=21i=1∑n(∥Pi−Pc−R(P′i−P′c)∥2+∥Pc−RP′c−t∥2)
根据上式,可以先求解 R R R,再求解 t t t
- 计算两组点的质心 P c P_c Pc 和 P ′ c {P'}_c P′c
- 计算每个点的去质心坐标 Q i = P i − P c Q_i = P_i -P_c Qi=Pi−Pc 和 Q ′ i = P ′ i − P ′ c {Q'}_i = {P'}_i - {P'}_c Q′i=P′i−P′c
- 定义矩阵 W = ∑ i = 1 n Q i Q ′ i T W = \sum_{i=1}^{n} Q_i {Q'}_i^T W=∑i=1nQiQ′iT,再SVD分解 W = U Σ V T W = U {\Sigma} V^T W=UΣVT
- 当 W W W 满秩时, R = U V T R = UV^T \quad R=UVT
- 计算 t = P c − R ⋅ P ′ c t = P_c - R \cdot {P'}_c t=Pc−R⋅P′c
相关参考代码:
cv::Point3f p1, p2;
int N = pts1.size();
for (int i = 0; i < N; i++) {
p1 += pts1[i];
p2 += pts2[i];
}
p1 /= N;
p2 /= N;
std::vector q1(N), q2(N);
for (int i = 0; i < N; i++) {
q1[i] = pts1[i] - p1;
q2[i] = pts2[i] - p2;
}
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for (int i = 0; i < N; i++) {
Eigen::Vector3d v3q1 = Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z);
Eigen::Vector3d v3q2 = Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z);
W += v3q1 * v3q2.transpose();
}
double determinantW =
W(0,0)*W(1,1)*W(2,2) + W(0,1)*W(1,2)*W(2,0) + W(0,2)*W(1,0)*W(2,1) -
(W(0,0)*W(1,2)*W(2,1) + W(0,1)*W(1,0)*W(2,2) + W(0,2)*W(1,1)*W(2,0));
assert(determinantW>1e-8);
// SVD on W
Eigen::JacobiSVD svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
R = U * (V.transpose());
t = Eigen::Vector3d(p1.x, p1.y, p1.z) - R * Eigen::Vector3d(p2.x, p2.y, p2.z);
Optical Flow
光流是一种描述像素随时间在图像之间运动的方法,计算部分像素的称为 稀疏光流,计算所有像素的称为 稠密光流。稀疏光流以 Lucas-Kanade光流 为代表,并可以在SLAM中用于跟踪特征点位置。

LK光流
灰度不变假设
I ( x + d x , y + d y , t + d t ) = I ( x , y , t ) I(x+dx, y+dy, t+dt) = I(x, y, t) I(x+dx,y+dy,t+dt)=I(x,y,t)
对左边一阶泰勒展开
I ( x + d x , y + d y , t + d t ) = I ( x , y , t ) + ∂ I ∂ x d x + ∂ I ∂ y d y + ∂ I ∂ t d t I(x+dx, y+dy, t+dt) = I(x, y, t) + \frac{\partial I}{\partial x} dx + \frac{\partial I}{\partial y} dy + \frac{\partial I}{\partial t} dt I(x+dx,y+dy,t+dt)=I(x,y,t)+∂x∂Idx+∂y∂Idy+∂t∂Idt
则
∂ I ∂ x d x + ∂ I ∂ y d y + ∂ I ∂ t d t = 0 \frac{\partial I}{\partial x} dx + \frac{\partial I}{\partial y} dy + \frac{\partial I}{\partial t} dt = 0 ∂x∂Idx+∂y∂Idy+∂t∂Idt=0
整理得
∂ I ∂ x d x d t + ∂ I ∂ y d y d t = − ∂ I d t \frac{\partial I}{\partial x} \frac{dx}{dt} + \frac{\partial I}{\partial y} \frac{dy}{dt} = - \frac{\partial I}{dt} ∂x∂Idtdx+∂y∂Idtdy=−dt∂I
简写为
I x u + I y v = − I t I_x u + I_y v = -I_t Ixu+Iyv=−It
即
[ I x I y ] [ u v ] = − I t \begin{bmatrix} I_x & I_y \end{bmatrix} \begin{bmatrix} u \\ v \end{bmatrix} = -I_t [IxIy][uv]=−It
在LK光流中,假设某个窗口(w x w)内的像素具有相同的运动
[ I x I y ] k [ u v ] = − I t k , k = 1 , … , w 2 {\begin{bmatrix} I_x & I_y \end{bmatrix}}_k \begin{bmatrix} u \\ v \end{bmatrix} = -{I_t}_k, \quad k=1, \dots, w^2 [IxIy]k[uv]=−Itk,k=1,…,w2
简写为
A [ u v ] = − b A \begin{bmatrix} u \\ v \end{bmatrix} = -b A[uv]=−b
从而得到图像间的运动速度或者某块像素的位置。
分类
| 增量方式 | Forward | Inverse |
|---|---|---|
| Additive | FAIA | IAFA |
| Compositional | FCIA | ICIA |
Forward-Additive 光流:
min Δ x i , Δ y i ∑ W ∥ I 1 ( x i , y i ) − I 2 ( x i + Δ x i , y i + Δ y i ) ∥ 2 2 \min_{\Delta x_i, \Delta y_i} \sum_{W} {\| I_1(x_i,y_i) - I_2(x_i+\Delta x_i, y_i+\Delta y_i) \|}_2^2 Δxi,ΔyiminW∑∥I1(xi,yi)−I2(xi+Δxi,yi+Δyi)∥22
在迭代开始时,Gauss-Newton 的计算依赖于 I 2 I_2 I2 在 ( x i , y i ) (x_i, y_i) (xi,yi) 处的梯度信息。然而,角点提取算法仅保证了 I 1 ( x i , y i ) I_1(x_i,y_i) I1(xi,yi) 处是角点(可以认为角度点存在明显梯度),但对于 I 2 I_2 I2,我们并没有办法假设 I 2 I_2 I2 在 ( x i , y i ) (x_i,y_i) (xi,yi) 处亦有梯度,从而 Gauss-Newton 并不一定成立。
反向的光流法(inverse) 则做了一个巧妙的技巧,即用 I 1 ( x i , y i ) I_1(x_i,y_i) I1(xi,yi) 处的梯度,替换掉原本要计算的 I 2 ( x i + Δ x i , y i + Δ y i ) I_2(x_i+\Delta x_i, y_i+\Delta y_i) I2(xi+Δxi,yi+Δyi) 的梯度。 I 1 ( x i , y i ) I_1(x_i,y_i) I1(xi,yi) 处的梯度不随迭代改变,所以只需计算一次,就可以在后续的迭代中一直使用,节省了大量计算时间。
讨论
- 在光流中,关键点的坐标值通常是浮点数,但图像数据都是以整数作为下标的。在光流中,通常的优化值都在几个像素内变化,所以用浮点数的像素插值(双线性插值)。
- 光流法通常只能估计几个像素内的误差。如果初始估计不够好,或者图像运动太大,光流法就无法得到有效的估计(不像特征点匹配那样)。但是,使用图像金字塔,可以让光流对图像运动不那么敏感。
- 多层金字塔光流
OpenCV 中相关函数:
- calcOpticalFlowPyrLK
相关参考代码:
for (int index = 0; index < count; index++) {
color = colorImgs[index];
depth = depthImgs[index];
if (index == 0) {
vector kps;
cv::Ptr detector =
cv::FastFeatureDetector::create();
detector->detect(color, kps);
for (auto kp:kps)
keypoints.push_back(kp.pt);
last_color = color;
continue;
}
if (color.data == nullptr || depth.data == nullptr)
continue;
vector next_keypoints;
vector prev_keypoints;
for (auto kp:keypoints)
prev_keypoints.push_back(kp);
vector status;
vector error;
cv::calcOpticalFlowPyrLK(
last_color, color, prev_keypoints, next_keypoints, status, error);
int i = 0;
for (auto iter = keypoints.begin(); iter != keypoints.end(); i++) {
if (status[i] == 0) {
iter = keypoints.erase(iter);
continue;
}
* iter = next_keypoints[i];
iter++;
}
last_color = color;
}
Direct Method
根据使用像素的数量,直接法分为以下三种
- 稀疏直接法:使用稀疏关键点,不计算描述子
- 半稠密直接法:只使用带有梯度的像素点,舍弃像素梯度不明显的地方
- 稠密直接法:使用所有像素
利用直接法计算相机位姿,建立优化问题时,最小化的是 光度误差(Photometric Error)
r ( ξ ) = I 1 ( p ) − I 2 ( p ′ ) = I 1 ( p ) − I 2 ( K exp ( ξ ∧ ) P ) r(\xi) = I_1(p) - I_2(p') = I_1(p) - I_2( K \exp({\xi}^{\wedge}) P ) r(ξ)=I1(p)−I2(p′)=I1(p)−I2(Kexp(ξ∧)P)
构建最小二乘问题
ξ ∗ = arg min ξ 1 2 ∑ i = 1 n ∥ r ( ξ ) ∥ 2 2 {\xi}^* = \arg \min_\xi \frac{1}{2} \sum_{i=1}^{n} {\| r(\xi) \| }_2^2 ξ∗=argξmin21i=1∑n∥r(ξ)∥22
更具体地,稀疏直接法
ξ ∗ = arg min ξ 1 N ∑ i = 1 N ∑ W i ∥ I 1 ( p i ) − I 2 ( π ( exp ( ξ ∧ ) π − 1 ( p i ) ) ) ∥ 2 2 {\xi}^* = \arg \min_\xi \frac{1}{N} \sum_{i=1}^N \sum_{W_i} {\| I_1(p_i) - I_2 (\pi(\exp({\xi}^{\wedge}) \pi_{-1}(p_i))) \|}_2^2 ξ∗=argξminN1i=1∑NWi∑∥I1(pi)−I2(π(exp(ξ∧)π−1(pi)))∥22
其雅克比矩阵的计算,可参见 视觉SLAM位姿优化时误差函数雅克比矩阵的计算
相关参考代码:
bool pose_estimation_direct(
const vector& measurements,
cv::Mat* gray, Eigen::Matrix3f& K, Eigen::Isometry3d& Tcw) {
typedef g2o::BlockSolver> DirectBlock;
DirectBlock::LinearSolverType * linearSolver =
new g2o::LinearSolverDense();
DirectBlock * solver_ptr = new DirectBlock(linearSolver);
g2o::OptimizationAlgorithmLevenberg * solver =
new g2o::OptimizationAlgorithmLevenberg(solver_ptr);
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm(solver);
optimizer.setVerbose(true);
g2o::VertexSE3Expmap * pose = new g2o::VertexSE3Expmap();
pose->setEstimate(g2o::SE3Quat(Tcw.rotation(), Tcw.translation()));
pose->setId(0);
optimizer.addVertex(pose);
int id = 1;
for (Measurement m: measurements) {
EdgeSE3ProjectDirect * edge =
new EdgeSE3ProjectDirect(
m.pos_world, K(0, 0), K(1, 1), K(0, 2), K(1, 2), gray);
edge->setVertex(0, pose);
edge->setMeasurement(m.grayscale);
edge->setInformation(Eigen::Matrix::Identity());
edge->setId(id++);
optimizer.addEdge(edge);
}
optimizer.initializeOptimization();
optimizer.optimize(30);
Tcw = pose->estimate();
}
参考文献
- 《视觉SLAM十四讲》
- Lucas-Kanade 20 Years On: A Unifying Framework
- 相机位姿求解问题?(知乎)