MWC(2) Multiwii初学者详细准备
1.1 软件准备
-
Arduino IDE
官方下载链接:https://www.arduino.cc/download_handler.php
或者Arduino社区资源:http://www.arduino.cn/thread-5838-1-1.html
建议下载最新版的安装文件,免安装的不会关联.ino文件,每次都要选有点麻烦。 -
Visual Studio
虽然官方的Arduino IDE是根正苗红的编译软件,但是实际上也没人用这个编,连代码高亮等基础功能都没有。建议配合万能的Visual Studio使用,事半功倍。这个建议下载Visual Studio 2015 community版本,免费而且该有的功能都有了。当然,最新的2017RC也可以,但是才出的是不是就要更新,麻烦,据说稳定性也还不太可以。只需要安装一个Arduino插件即可实现在VS中编译运行Arduino。
官网链接:https://www.visualstudio.com/zh-hans/thank-you-downloading-visual-studio/?sku=Community&rel=15 -
Multiwii v2.4源代码
开源飞控程序,已经更新到2.4版本了,直接看最新的就行了。此开源程序被托管在了GoogleCode上
官方下载链接:https://code.google.com/archive/p/multiwii/ -
FTDI USB转串口工具
因为MWC飞控板是通过串口和上位机(可以理解为控制平台,譬如你的计算机)通信的,而现在的笔记本电脑都不配备串口,所以需要这个软件来进行转换。
官方链接:http://www.ftdichip.com/Drivers/CDM/CDM21226_Setup.zip -
Java环境
按照自己电脑,去官网下载最新的Jre或者JDK。Jre是java运行环境,jdk是完整的Java 开发套装,自然也包括了java环境。
Jre官网链接:http://www.oracle.com/technetwork/java/javase/downloads/jre8-downloads-2133155.html
JDK官网链接:http://www.oracle.com/technetwork/java/javase/downloads/jdk8-downloads-2133151.html
1.2 硬件准备
硬件需求很简单,到目前为止,你只需要一块MWC的飞控板,例如我的Cirus AIOP,而且要清楚知道你的飞控板的型号,所带的传感器类型。
当然,还有一根数据线,接口类型得和你的板子下载借口相同,买飞控板都有送,一般用来连接安卓手机的数据线就可以。
2 开始旅程
好的,到这里,你已经准备好了所有的行囊,武器装备,可以开始踏上这条没有尽头的旅程了。
将步骤分为一下几个部分:
2.1 USB转串口驱动安装
用数据线连接飞控板和电脑,打开FTDI程序,按程序一步步安装就行,不会有什么问题。
若安装成功,可以在电脑的设备管理器里看到端口COM X(X根据每个电脑不同都会有所不同,我的就是com3)
2.2 安装Arduino
依照安装程序即可,记住安装路径
2.3 安装Java,配置环境
教程很多,随意百度,在此就不再赘述了。
http://jingyan.baidu.com/article/fea4511a12b158f7bb9125b9.html
http://www.runoob.com/java/java-environment-setup.html
2.4 VS环境配置
打开Visual Studio——工具——扩展与更新 
左边选择联机,然后在右上方的搜索框里输入arduino,
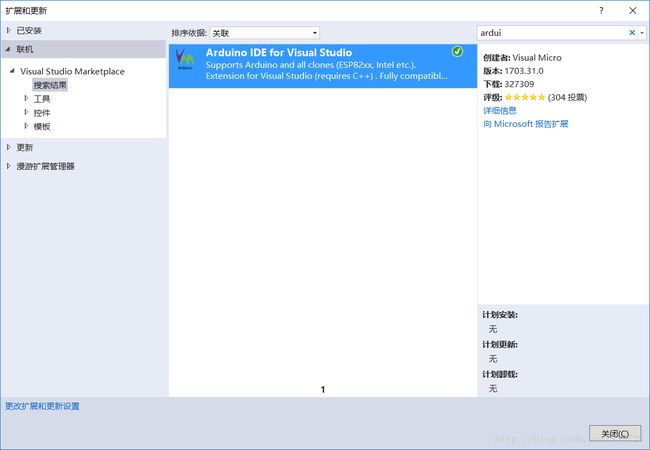
点击安装,结束后重启VS,就能看到多了一栏,依次点击vMicro——General——Configure Ide Locatios 
下拉框里选择Arduino1.6/1.8,将下面的第一个路径栏选到你安装的Arduino目录,按ok结束配置。
接下来定位到工具栏 ![]()
第一个选择Arduino1.6/1.8,第二个依据你飞控板的型号选择,像我的就是Mega2560,第三个下拉框如果什么都没有,那就是你的USB转串口驱动没装好。若显示COM X即表示驱动已安装完毕。
至此,大功告成。
3 验证程序
3.1 Arduino IDE
现尝试在原生环境下编译
打开Arduino,设置同上,按自己飞控和电脑情况具体配置
工具——开发板——(Mega2560),
工具——处理器——(Mega2560),
工具——端口——(COM3)
文件——打开——(你解压后的Multiwii目录下的Multiwii.ino文件)  还需要一些设置,定位到config.h文件,有前人帮忙翻译好了,
还需要一些设置,定位到config.h文件,有前人帮忙翻译好了,
http://www.cnblogs.com/Tranquilty/p/4848853.html
在这里,我们要按照自己的情况来设置,
3.1.1 选择飞行器类型
/************************** The type of multicopter ****************************/
//#define GIMBAL
//#define BI
//#define TRI
//#define QUADP
#define QUADX
//#define Y4
//#define Y6
//#define HEX6
//#define HEX6X
//#define HEX6H // New Model
//#define OCTOX8
//#define OCTOFLATP
//#define OCTOFLATX
//#define FLYING_WING
//#define VTAIL4
//#define AIRPLANE
//#define SINGLECOPTER
//#define DUALCOPTER
//#define HELI_120_CCPM
//#define HELI_90_DEG- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
这里选择了QUADX,即X型四轴;
3.1.2 选择飞控类型
/*************************** Combined IMU Boards ********************************/
/* if you use a specific sensor board:
please submit any correction to this list.
Note from Alex: I only own some boards, for other boards, I'm not sure, the info was gathered via rc forums, be cautious */
//#define FFIMUv1 // first 9DOF+baro board from Jussi, with HMC5843 <- confirmed by Alex
//#define FFIMUv2 // second version of 9DOF+baro board from Jussi, with HMC5883 <- confirmed by Alex
//#define FREEIMUv1 // v0.1 & v0.2 & v0.3 version of 9DOF board from Fabio
//#define FREEIMUv03 // FreeIMU v0.3 and v0.3.1
//#define FREEIMUv035 // FreeIMU v0.3.5 no baro
//#define FREEIMUv035_MS // FreeIMU v0.3.5_MS <- confirmed by Alex
//#define FREEIMUv035_BMP // FreeIMU v0.3.5_BMP
//#define FREEIMUv04 // FreeIMU v0.4 with MPU6050, HMC5883L, MS561101BA <- confirmed by Alex
//#define FREEIMUv043 // same as FREEIMUv04 with final MPU6050 (with the right ACC scale)
//#define NANOWII // the smallest multiwii FC based on MPU6050 + pro micro based proc <- confirmed by Alex
//#define PIPO // 9DOF board from erazz
//#define QUADRINO // full FC board 9DOF+baro board from witespy with BMP085 baro <- confirmed by Alex
//#define QUADRINO_ZOOM // full FC board 9DOF+baro board from witespy second edition
//#define QUADRINO_ZOOM_MS// full FC board 9DOF+baro board from witespy second edition <- confirmed by Alex
//#define ALLINONE // full FC board or standalone 9DOF+baro board from CSG_EU
//#define AEROQUADSHIELDv2
//#define ATAVRSBIN1 // Atmel 9DOF (Contribution by EOSBandi). requires 3.3V power.
//#define SIRIUS // Sirius Navigator IMU <- confirmed by Alex
//#define SIRIUSGPS // Sirius Navigator IMU using external MAG on GPS board <- confirmed by Alex
//#define SIRIUS600 // Sirius Navigator IMU using the WMP for the gyro
//#define SIRIUS_AIR // Sirius Navigator IMU 6050 32U4 from MultiWiiCopter.com <- confirmed by Alex
//#define SIRIUS_AIR_GPS // Sirius Navigator IMU 6050 32U4 from MultiWiiCopter.com with GPS/MAG remote located
//#define SIRIUS_MEGAv5_OSD // Paris_Sirius™ ITG3050,BMA280,MS5611,HMC5883,uBlox http://www.Multiwiicopter.com <- confirmed by Alex
//#define MINIWII // Jussi's MiniWii Flight Controller <- confirmed by Alex
//#define MICROWII // MicroWii 10DOF with ATmega32u4, MPU6050, HMC5883L, MS561101BA from http://flyduino.net/
//#define CITRUSv2_1 // CITRUS from qcrc.ca
//#define CHERRY6DOFv1_0
//#define DROTEK_10DOF // Drotek 10DOF with ITG3200, BMA180, HMC5883, BMP085, w or w/o LLC
//#define DROTEK_10DOF_MS // Drotek 10DOF with ITG3200, BMA180, HMC5883, MS5611, LLC
//#define DROTEK_6DOFv2 // Drotek 6DOF v2
//#define DROTEK_6DOF_MPU // Drotek 6DOF with MPU6050
//#define DROTEK_10DOF_MPU//
//#define MONGOOSE1_0 // mongoose 1.0 http://store.ckdevices.com/
//#define CRIUS_LITE // Crius MultiWii Lite
//#define CRIUS_SE // Crius MultiWii SE
//#define CRIUS_SE_v2_0 // Crius MultiWii SE 2.0 with MPU6050, HMC5883 and BMP085
//#define OPENLRSv2MULTI // OpenLRS v2 Multi Rc Receiver board including ITG3205 and ADXL345
//#define BOARD_PROTO_1 // with MPU6050 + HMC5883L + MS baro
//#define BOARD_PROTO_2 // with MPU6050 + slave MAG3110 + MS baro
//#define GY_80 // Chinese 10 DOF with L3G4200D ADXL345 HMC5883L BMP085, LLC
//#define GY_85 // Chinese 9 DOF with ITG3205 ADXL345 HMC5883L LLC
//#define GY_86 // Chinese 10 DOF with MPU6050 HMC5883L MS5611, LLC
//#define GY_88 // Chinese 10 DOF with MPU6050 HMC5883L BMP085, LLC
//#define GY_521 // Chinese 6 DOF with MPU6050, LLC
//#define INNOVWORKS_10DOF // with ITG3200, BMA180, HMC5883, BMP085 available here http://www.diymulticopter.com
//#define INNOVWORKS_6DOF // with ITG3200, BMA180 available here http://www.diymulticopter.com
//#define MultiWiiMega // MEGA + MPU6050+HMC5883L+MS5611 available here http://www.diymulticopter.com
//#define PROTO_DIY // 10DOF mega board
//#define IOI_MINI_MULTIWII// www.bambucopter.com
//#define Bobs_6DOF_V1 // BobsQuads 6DOF V1 with ITG3200 & BMA180
//#define Bobs_9DOF_V1 // BobsQuads 9DOF V1 with ITG3200, BMA180 & HMC5883L
//#define Bobs_10DOF_BMP_V1 // BobsQuads 10DOF V1 with ITG3200, BMA180, HMC5883L & BMP180 - BMP180 is software compatible with BMP085
//#define FLYDUINO_MPU // MPU6050 Break Out onboard 3.3V reg
#define CRIUS_AIO_PRO
//#define DESQUARED6DOFV2GO // DEsquared V2 with ITG3200 only
//#define DESQUARED6DOFV4 // DEsquared V4 with MPU6050
//#define LADYBIRD
//#define MEGAWAP_V2_STD // available here: http://www.multircshop.com <- confirmed by Alex
//#define MEGAWAP_V2_ADV
//#define HK_MultiWii_SE_V2 // Hobbyking board with MPU6050 + HMC5883L + BMP085
//#define HK_MultiWii_328P // Also labeled "Hobbybro" on the back. ITG3205 + BMA180 + BMP085 + NMC5583L + DSM2 Connector (Spektrum Satellite)
//#define RCNet_FC // RCNet FC with MPU6050 and MS561101BA http://www.rcnet.com
//#define RCNet_FC_GPS // RCNet FC with MPU6050 + MS561101BA + HMC5883L + UBLOX GPS http://www.rcnet.com
//#define FLYDU_ULTRA // MEGA+10DOF+MT3339 FC
//#define DIYFLYING_MAGE_V1 // diyflying 10DOF mega board with MPU6050 + HMC5883L + BMP085 http://www.indoor-flying.hk
//#define MultiWii_32U4_SE // Hextronik MultiWii_32U4_SE
//#define MultiWii_32U4_SE_no_baro // Hextronik MultiWii_32U4_SE without the MS561101BA to free flash-memory for other functions
//#define Flyduino9DOF // Flyduino 9DOF IMU MPU6050+HMC5883l
//#define Nano_Plane // Multiwii Plane version with tail-front LSM330 sensor http://www.radiosait.ru/en/page_5324.html- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
在这里找到你的飞控板类型,如果是买的现成的集成板,一般这里面就能直接找到,如果找到了,跳过下一步,如果没有,直接看下一步。
3.1.3 选择传感器类型
************************* independent sensors ********************************/
/* leave it commented if you already checked a specific board above */
/* I2C gyroscope */
//#define WMP
//#define ITG3050
//#define ITG3200
//#define MPU3050
//#define L3G4200D
//#define MPU6050 //combo + ACC
//#define LSM330 //combo + ACC
/* I2C accelerometer */
//#define MMA7455
//#define ADXL345
//#define BMA020
//#define BMA180
//#define BMA280
//#define LIS3LV02
//#define LSM303DLx_ACC
//#define MMA8451Q
/* I2C barometer */
//#define BMP085
//#define MS561101BA
/* I2C magnetometer */
//#define HMC5843
//#define HMC5883
//#define AK8975
//#define MAG3110
/* Sonar */ // for visualization purpose currently - no control code behind
//#define SRF02 // use the Devantech SRF i2c sensors
//#define SRF08
//#define SRF10
//#define SRF23- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
这里分别选择你的陀螺仪,加速度计,气压计,地磁计,声呐型号,取消注释。没有的话就保留注释。
接下来,编译(验证)——上传,显示上传成功就代表完成了。
3.1.4 上位机GUI
打开解压缩的Multiwii2.4文件夹,打开MultiWiiConf——application.windows64(按照自己操作系统来,32位打开application.windows32)
不能打开说明java环节没有配置好。 
这就是上位机界面。
点击COM3——START 就能看到飞控板被激活了,当然现在只是简单的读取里面传感器的数据,PID等设置的参数。 
3.2 VS环境下编译
与Arduino下完全相同,vMicro——Open Existing Arduino Project——Multiwii.ino
Build——Upload
等待上传成功即可,打开上位机GUI步骤同上。
Tips
1. 同一个串口不能被同时占用,所以当打开串口失败是,看看是不是有别的软件正在使用串口。
2. 至此只是简单得走完了一个流程,看到自己的“输入”有了相应的“响应”应该会激励你的学习动力。