一 Vold工作机制分析
vold进程:管理和控制Android平台外部存储设备,包括SD插拨、挂载、卸载、格式化等;
vold进程接收来自内核的外部设备消息。
Vold框架图如下:

Vold接收来自内核的事件,通过netlink机制。
Netlink 是一种特殊的 socket;
Netlink 是一种在内核与用户应用间进行双向数据传输的非常好的方式,用户态应用使用标准的socket API 就可以使用 netlink 提供的强大功能;
Netlink是一种异步通信机制,在内核与用户态应用之间传递的消息保存在socket缓存队列中;
内核通过Netlink发送uEvent格式消息给用户空间程序;外部设备发生变化,Kernel发送uevent消息。
二 Vold进程启动过程
service vold /system/bin/vold class core socket vold stream 0660 root mount ioprio be 2
vold进程执行过程:
\system\vold\main.cpp
int main() { VolumeManager *vm; CommandListener *cl; NetlinkManager *nm; //创建vold设备文件夹 mkdir("/dev/block/vold", 0755); //初始化Vold相关的类实例 single vm = VolumeManager::Instance(); nm = NetlinkManager::Instance(); //CommandListener 创建vold socket监听上层消息 cl = new CommandListener(); vm->setBroadcaster((SocketListener *) cl); nm->setBroadcaster((SocketListener *) cl); //启动VolumeManager vm->start(); //根据配置文件/etc/vold.fstab 初始化VolumeManager process_config(vm); //启动NetlinkManager socket监听内核发送uevent nm->start(); //向/sys/block/目录下所有设备uevent文件写入“add\n”, //触发内核sysfs发送uevent消息 coldboot("/sys/block"); //启动CommandListener监听vold socket cl->startListener(); // Eventually we'll become the monitoring thread while(1) { sleep(1000); } exit(0); }
process_config解析vold.fstab文件:
static int process_config(VolumeManager *vm) { //打开vold.fstab的配置文件 fp = fopen("/etc/vold.fstab", "r") //解析vold.fstab 配置存储设备的挂载点 while(fgets(line, sizeof(line), fp)) { const char *delim = " \t"; char *type, *label, *mount_point, *part, *mount_flags, *sysfs_path; type = strtok_r(line, delim, &save_ptr) label = strtok_r(NULL, delim, &save_ptr) mount_point = strtok_r(NULL, delim, &save_ptr) //判断分区 auto没有分区 part = strtok_r(NULL, delim, &save_ptr) if (!strcmp(part, "auto")) { //创建DirectVolume对象 相关的挂载点设备的操作 dv = new DirectVolume(vm, label, mount_point, -1); } else { dv = new DirectVolume(vm, label, mount_point, atoi(part)); } //添加挂载点设备路径 while ((sysfs_path = strtok_r(NULL, delim, &save_ptr))) { dv->addPath(sysfs_path) } //将DirectVolume 添加到VolumeManager管理 vm->addVolume(dv); } fclose(fp); return 0; }
vold.fstab文件:
导出一个我的手机里面的vold.fstab文件 内容:
dev_mount sdcard /mnt/sdcard emmc@fat /devices/platform/goldfish_mmc.0 /devices/platform/mtk-sd.0/mmc_host dev_mount external_sdcard /mnt/sdcard/external_sd auto /devices/platform/goldfish_mmc.1 /devices/platform/mtk-sd.1/mmc_host
vold.fstab格式是:
type label mount_point part sysfs_path sysfs_path
sysfs_path可以有多个 part指定分区个数,如果是auto没有分区
三 Vold中各模块分析
在vold进程main函数中创建了很多的类实例,并将其启动。
int main() { …… vm->start(); nm->start(); cl->startListener(); }
这些类对象之间是如何的,还需要现弄清楚每个类的职责和工作机制。
1 NetlinkManager模块
NetlinkManager模块接收从Kernel发送的Uevent消息,解析转换成NetlinkEvent对象;再将此NetlinkEvent对象传递给VolumeManager处理。
此模块相关的类结构:

下面从start开始,看起如何对Kernel的Uevent消息进行监控的。
NetlinkManager start:
int NetlinkManager::start() { //netlink使用的socket结构 struct sockaddr_nl nladdr; //初始化socket数据结构 memset(&nladdr, 0, sizeof(nladdr)); nladdr.nl_family = AF_NETLINK; nladdr.nl_pid = getpid(); nladdr.nl_groups = 0xffffffff; //创建socket PF_NETLINK类型 mSock = socket(PF_NETLINK,SOCK_DGRAM,NETLINK_KOBJECT_UEVENT); //配置socket 大小 setsockopt(mSock, SOL_SOCKET, SO_RCVBUFFORCE, &sz, sizeof(sz); setsockopt(mSock, SOL_SOCKET, SO_PASSCRED, &on, sizeof(on); //bindsocket地址 bind(mSock, (struct sockaddr *) &nladdr, sizeof(nladdr); //创建NetlinkHandler 传递socket标识,并启动 mHandler = new NetlinkHandler(mSock); mHandler->start(); return 0; }
NetlinkHandler start:
int NetlinkHandler::start() { //父类startListener return this->startListener(); }
NetlinkListener start:
int SocketListener::startListener() { //NetlinkHandler mListen为false if (mListen && listen(mSock, 4) < 0) { return -1; } else if (!mListen){ //mListen为false 用于netlink消息监听 //创建SocketClient作为SocketListener 的客户端 mClients->push_back(new SocketClient(mSock, false, mUseCmdNum)); }
//创建匿名管道 pipe(mCtrlPipe); //创建线程执行函数threadStart 参this pthread_create(&mThread, NULL, SocketListener::threadStart, this); }
线程监听Kernel netlink发送的UEvent消息:
void *SocketListener::threadStart(void *obj) { //参数转换 SocketListener *me = reinterpret_cast(obj); me->runListener(); pthread_exit(NULL); return NULL; }
SocketListener 线程消息循环:
void SocketListener::runListener() { //SocketClient List SocketClientCollection *pendingList = new SocketClientCollection(); while(1) { fd_set read_fds; //mListen 为false if (mListen) { max = mSock; FD_SET(mSock, &read_fds); } //加入一组文件描述符集合 选择fd最大的max FD_SET(mCtrlPipe[0], &read_fds); pthread_mutex_lock(&mClientsLock); for (it = mClients->begin(); it != mClients->end(); ++it) { int fd = (*it)->getSocket(); FD_SET(fd, &read_fds); if (fd > max) max = fd; } pthread_mutex_unlock(&mClientsLock); //监听文件描述符是否变化 rc = select(max + 1, &read_fds, NULL, NULL, NULL); //匿名管道被写,退出线程 if (FD_ISSET(mCtrlPipe[0], &read_fds)) break; //mListen 为false if (mListen && FD_ISSET(mSock, &read_fds)) { //mListen 为ture 表示正常监听socket struct sockaddr addr; do { //接收客户端连接 c = accept(mSock, &addr, &alen); } while (c < 0 && errno == EINTR); //此处创建一个客户端SocketClient加入mClients列表中,异步延迟处理 pthread_mutex_lock(&mClientsLock); mClients->push_back(new SocketClient(c, true, mUseCmdNum)); pthread_mutex_unlock(&mClientsLock); } /* Add all active clients to the pending list first */ pendingList->clear(); //将所有有消息的Client加入到pendingList中 pthread_mutex_lock(&mClientsLock); for (it = mClients->begin(); it != mClients->end(); ++it) { int fd = (*it)->getSocket(); if (FD_ISSET(fd, &read_fds)) { pendingList->push_back(*it); } } pthread_mutex_unlock(&mClientsLock); //处理所有消息 while (!pendingList->empty()) { it = pendingList->begin(); SocketClient* c = *it; pendingList->erase(it); //处理有数据发送的socket 虚函数 if (!onDataAvailable(c) && mListen) { //mListen为false } } } }
Netlink消息处理:

在消息循环中调用onDataAvailable处理消息,onDataAvailable是个虚函数,NetlinkListener重写了此函数。
NetlinkListener onDataAvailable消息处理:
bool NetlinkListener::onDataAvailable(SocketClient *cli) { //获取socket id int socket = cli->getSocket(); //接收netlink uevent消息 count = TEMP_FAILURE_RETRY(uevent_kernel_multicast_uid_recv( socket, mBuffer, sizeof(mBuffer), &uid)); //解析uevent消息为NetlinkEvent消息 NetlinkEvent *evt = new NetlinkEvent(); evt->decode(mBuffer, count, mFormat); //处理NetlinkEvent onEvent虚函数 onEvent(evt); }
将接收的Uevent数据转化成NetlinkEvent数据,调用onEvent处理,NetlinkListener子类NetlinkHandler重写了此函数。
NetlinkHandler NetlinkEvent数据处理:
void NetlinkHandler::onEvent(NetlinkEvent *evt) { //获取VolumeManager实例 VolumeManager *vm = VolumeManager::Instance(); //设备类型 const char *subsys = evt->getSubsystem(); //将消息传递给VolumeManager处理 if (!strcmp(subsys, "block")) { vm->handleBlockEvent(evt); } }
NetlinkManager通过NetlinkHandler将接收到Kernel内核发送的Uenvet消息,
转化成了NetlinkEvent结构数据传递给VolumeManager处理。
2 VolumeManager模块
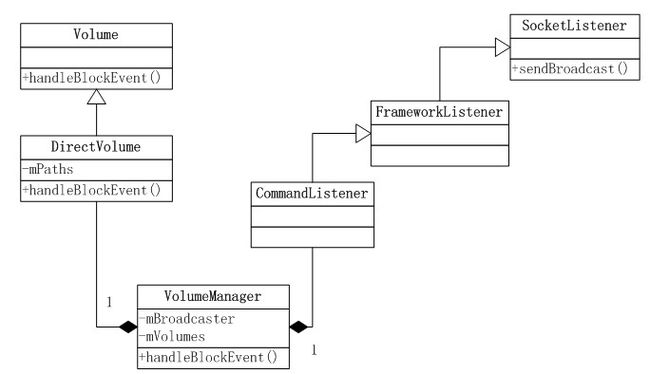
此模块管理所有挂载的设备节点以及相关操作执行;下面是VolumeManager模块类结构图:

DirectVolume:一个实体存储设备在代码中的抽象。
SocketListenner:创建线程,监听socket。
这里VolumeManager构造的SocketListenner与NetlinkManager构造的SocketListenner有所不同的:
NetlinkManager构造的SocketListenner:Kernel与Vold通信;
VolumeManager构造的SocketListenner:Native Vold与Framework MountService 通信;
VolumeManager构造的SocketListenner,由vold进程main函数中创建的CommandListener:
int main() { …… CommandListener *cl; cl = new CommandListener(); vm->setBroadcaster((SocketListener *) cl); //启动CommandListener监听 cl->startListener(); }
VolumeManager工作流程:
//从main函数中的start开始: int VolumeManager::start() { return 0; }
NetlinkManager接收到Kernel通过netlink发送的Uevent消息,转化成了NetlinkEvent消息,再传递给了VolumeManager处理。
NetlinkManager与VolumeManager交互流程图:

VolumeManager处理消息 handleBlockEvent:
从NetlinkManager到VolumeManager代码过程
函数执行从onEvent到handleBlockEvent:
void NetlinkHandler::onEvent(NetlinkEvent *evt) { …… //将消息传递给VolumeManager处理 if (!strcmp(subsys, "block")) { vm->handleBlockEvent(evt); } } void VolumeManager::handleBlockEvent(NetlinkEvent *evt) { //有状态变化设备路径 const char *devpath = evt->findParam("DEVPATH");
//遍历VolumeManager中所管理Volume对象(各存储设备代码抽象) for (it = mVolumes->begin(); it != mVolumes->end(); ++it) { if (!(*it)->handleBlockEvent(evt)) { hit = true; break; } } }
将消息交给各个Volume对象处理:DirectVolume
从VolumeManager到所管理的Volume对象
这里的Volume为其派生类DirectVolume。
int DirectVolume::handleBlockEvent(NetlinkEvent *evt)
{ //有状态变化设备路径 const char *dp = evt->findParam("DEVPATH"); PathCollection::iterator it; for (it = mPaths->begin(); it != mPaths->end(); ++it) { //匹配 设备路径 if (!strncmp(dp, *it, strlen(*it))) { int action = evt->getAction(); const char *devtype = evt->findParam("DEVTYPE"); //动作判断 if (action == NetlinkEvent::NlActionAdd) { int major = atoi(evt->findParam("MAJOR")); int minor = atoi(evt->findParam("MINOR")); char nodepath[255]; //设备节点路径名称 snprintf(nodepath,sizeof(nodepath), "/dev/block/vold/%d:%d", major, minor);
//创建设备节点 createDeviceNode(nodepath, major, minor); if (!strcmp(devtype, "disk")) { //添加disk handleDiskAdded(dp, evt); } else { //添加分区 handlePartitionAdded(dp, evt); } } else if (action == NetlinkEvent::NlActionRemove) { } else if (action == NetlinkEvent::NlActionChange) { } else { SLOGW("Ignoring non add/remove/change event"); } return 0; } } }
为什么要让VolumeManager中的每一个Volume对象都去处理SD状态变换消息,
每一个Volume可能对应多个Path;即一个挂载点对应多个物理设备。
抽象存储设备DirectVolume 动作状态变化处理:
void DirectVolume::handleDiskAdded(const char *devpath, NetlinkEvent *evt) { //主次设备号 mDiskMajor = atoi(evt->findParam("MAJOR")); mDiskMinor = atoi(evt->findParam("MINOR")); //设备分区情况 const char *tmp = evt->findParam("NPARTS"); mDiskNumParts = atoi(tmp); if (mDiskNumParts == 0) { //没有分区,Volume状态为Idle setState(Volume::State_Idle); } else { //有分区未加载,设置Volume状态Pending setState(Volume::State_Pending); } //格式化通知msg:"Volume sdcard /mnt/sdcard disk inserted (179:0)" char msg[255]; snprintf(msg, sizeof(msg), "Volume %s %s disk inserted (%d:%d)", getLabel(), getMountpoint(), mDiskMajor, mDiskMinor); //调用VolumeManager中的Broadcaster——>CommandListener 发送此msg mVm->getBroadcaster()->sendBroadcast(ResponseCode::VolumeDiskInserted, msg, false); }
消息通知Framework层存储设备状态变化:
类继承关系:
发送消息通知Framework层是在SocketListener中完成;
void SocketListener::sendBroadcast(int code, const char *msg, bool addErrno)
{ pthread_mutex_lock(&mClientsLock); //遍历所有的消息接收时创建的Client SocketClient // SocketClient将消息通过socket(“vold”)通信 for (i = mClients->begin(); i != mClients->end(); ++i) { (*i)->sendMsg(code, msg, addErrno, false); } pthread_mutex_unlock(&mClientsLock); }
这里工作的SocketListener是VolumeManager的,SocketListener的派生类CommandListener,
用来与Framework交互的,监听Socket消息。通过VolumeManager中调用sendBroadcast,与CommandListener模块进行交互。
由此需要清楚CommandListener模块工作流程。
3 CommandListener模块
CommandListener监听Socket,使Vold与Framework层进行进程通信;
其相关类继承结构图如下:

CommandListener工作流程:
int main() { VolumeManager *vm; CommandListener *cl; NetlinkManager *nm; //CommandListener 创建vold socket监听上层消息 cl = new CommandListener(); //作为VolumeManager与NetlinkManager的Broadcaster vm->setBroadcaster((SocketListener *) cl); nm->setBroadcaster((SocketListener *) cl); //启动CommandListener监听 cl->startListener(); …… }
CommandListener实例的创建:构造函数
CommandListener构造函数:
CommandListener::CommandListener() : FrameworkListener("vold", true) { //注册Framework发送的相关命令 Command模式 registerCmd(new DumpCmd()); registerCmd(new VolumeCmd()); registerCmd(new AsecCmd()); registerCmd(new ObbCmd()); registerCmd(new StorageCmd()); registerCmd(new XwarpCmd()); registerCmd(new CryptfsCmd()); }
FrameworkListener构造函数:
FrameworkListener::FrameworkListener(const char *socketName, bool withSeq) : SocketListener(socketName, true, withSeq) { mCommands = new FrameworkCommandCollection(); mWithSeq = withSeq; }
注册Command:
void FrameworkListener::registerCmd(FrameworkCommand *cmd) { mCommands->push_back(cmd); }
SocketListener构造函数:
SocketListener::SocketListener(const char *socketName, bool listen, bool useCmdNum) { //mListen = true 正常的socket监听 mListen = listen; //socket 名称“vold” mSocketName = socketName; mSock = -1; mUseCmdNum = useCmdNum; //初始化锁 pthread_mutex_init(&mClientsLock, NULL); //构造Listener Client List mClients = new SocketClientCollection(); }
CommandListener启动 startListener:
int SocketListener::startListener() { //mSocketName = “Vold” mSock = android_get_control_socket(mSocketName); //NetlinkHandler mListen为true 监听socket if (mListen && < 0) { return -1; } else if (!mListen){ mClients->push_back(new SocketClient(mSock, false, mUseCmdNum)); } //创建匿名管道 pipe(mCtrlPipe); //创建线程执行函数threadStart 参数this pthread_create(&mThread, NULL, SocketListener::threadStart, this); } void *SocketListener::threadStart(void *obj) { SocketListener *me = reinterpret_cast(obj); me->runListener(); } void SocketListener::runListener() { //SocketClient List SocketClientCollection *pendingList = new SocketClientCollection(); while(1) { fd_set read_fds; //mListen 为true if (mListen) { max = mSock; FD_SET(mSock, &read_fds); } //加入一组文件描述符集合 选择fd最大的max select有关 FD_SET(mCtrlPipe[0], &read_fds); pthread_mutex_lock(&mClientsLock); for (it = mClients->begin(); it != mClients->end(); ++it) { int fd = (*it)->getSocket(); FD_SET(fd, &read_fds); if (fd > max) max = fd; } pthread_mutex_unlock(&mClientsLock); //监听文件描述符是否变化 rc = select(max + 1, &read_fds, NULL, NULL, NULL); //匿名管道被写,退出线程 if (FD_ISSET(mCtrlPipe[0], &read_fds)) break; //mListen 为true if (mListen && FD_ISSET(mSock, &read_fds)) { //mListen 为ture 表示正常监听socket struct sockaddr addr; do { c = accept(mSock, &addr, &alen); } while (c < 0 && errno == EINTR); //创建一个客户端SocketClient,加入mClients列表中 到异步延迟处理 pthread_mutex_lock(&mClientsLock); mClients->push_back(new SocketClient(c, true, mUseCmdNum)); pthread_mutex_unlock(&mClientsLock); } /* Add all active clients to the pending list first */ pendingList->clear(); //将所有有消息的Client加入到pendingList中 pthread_mutex_lock(&mClientsLock); for (it = mClients->begin(); it != mClients->end(); ++it) { int fd = (*it)->getSocket(); if (FD_ISSET(fd, &read_fds)) { pendingList->push_back(*it); } } pthread_mutex_unlock(&mClientsLock); /* Process the pending list, since it is owned by the thread,*/ while (!pendingList->empty()) { it = pendingList->begin(); SocketClient* c = *it; //处理有数据发送的socket if (!onDataAvailable(c) && mListen) { //mListen为true …… } } } }
CommandListener启动的线程监听Socket消息,接收到的消息处理onDataAvailable。
CommandListener父类FrameworkCommand重写了此函数。
CommandListener监听Socket消息处理:
bool FrameworkListener::onDataAvailable(SocketClient *c) { char buffer[255]; //读取socket消息 len = TEMP_FAILURE_RETRY(read(c->getSocket(), buffer, sizeof(buffer))); for (i = 0; i < len; i++) { if (buffer[i] == '\0') { //根据消息内容 派发命令 dispatchCommand(c, buffer + offset); offset = i + 1; } } return true; } void FrameworkListener::dispatchCommand(SocketClient *cli, char *data) { char *argv[FrameworkListener::CMD_ARGS_MAX]; //解析消息内容 命令 参数 …… //执行对应的消息 for (i = mCommands->begin(); i != mCommands->end(); ++i) { FrameworkCommand *c = *i; //匹配命令 if (!strcmp(argv[0], c->getCommand())) { //执行命令 c->runCommand(cli, argc, argv); goto out; } } out: return; }
Command执行处理:以VolumeCommand为例
CommandListener::VolumeCmd::VolumeCmd() : VoldCommand("volume") { } int CommandListener::VolumeCmd::runCommand(SocketClient *cli, int argc, char **argv) { //获取VolumeManager实例 VolumeManager *vm = VolumeManager::Instance(); //Action判断 传递给VolumeManager处理 if (!strcmp(argv[1], "list")) { return vm->listVolumes(cli); } else if (!strcmp(argv[1], "debug")) { vm->setDebug(!strcmp(argv[2], "on") ? true : false); } else if (!strcmp(argv[1], "mount")) { rc = vm->mountVolume(argv[2]); } else if (!strcmp(argv[1], "unmount")) { rc = vm->unmountVolume(argv[2], force, revert); } else if (!strcmp(argv[1], "format")) { rc = vm->formatVolume(argv[2]); } else if (!strcmp(argv[1], "share")) { rc = vm->shareVolume(argv[2], argv[3]); } else if (!strcmp(argv[1], "unshare")) { rc = vm->unshareVolume(argv[2], argv[3]); } else if (!strcmp(argv[1], "shared")) { …… return 0; }
CommandListener使用Command模式。
CommandListener接收到来自Framework层得消息,派发命令处理,再传递给VolumeManager处理。
VolumeManager中Action处理:
int VolumeManager::unmountVolume(const char *label) { //查找Volume Volume *v = lookupVolume(label); //Volume执行动作 return v-> unmountVol (); } //VolumeAction处理: int Volume::unmountVol(bool force, bool revert) { doUnmount(Volume::SEC_STG_SECIMGDIR, force); …… } int Volume::doUnmount(const char *path, bool force) { …… //systemcall umount(path); }
整个Vold处理过程框架图如下:
