GMSK调制解调(一)
一、连续相位调制原理
1、CPM信号模型
CPMC信号的实数域数学表达式:
![]()
上式中,A表示符号能量,fc表示载波频率,I为发送的码元数据

T表示码元周期,![]() 承载了待发送的码元信息,表示CPM基带信号的时变相位函数,
承载了待发送的码元信息,表示CPM基带信号的时变相位函数,
![]() 为信号的初始相位。与PSK信号基带相位取有限的离散值不同,CPM基带信号的相位
为信号的初始相位。与PSK信号基带相位取有限的离散值不同,CPM基带信号的相位![]()
是时间的连续函数。下面给出CPM信号的连续相位函数![]() 的表达式:
的表达式:

上式中,h为CPM信号的调制指数,它决定了每个符号周期内CPM信号的相位变化量。调制指数h越大,一个符号周期内相位的变化越大,时域和频域上越容易区分:q(t)称为相位成形脉冲函数,由一个持续时间有限的脉冲函数g(t)积分得到:
![]()
所以脉冲函数g(t)也称为频率成形脉冲。

频率脉冲函数g(t)仅在区间[0,LT]有非零值,其中L称为关联长度,且频率脉冲函数g(t)具有一下特点:

因此,相位成形脉冲函数q(t)满足以下关系:
由上面各式可得,调制指数h、频率成形脉冲函数g(t)、关联长度L和基带符号的进制数M,共同决定了CPM基带信号的相位随时间变化的规律,选择不同的调制指数可以得到不同的连续相位调制信号,并且这一大类CPM信号具有相似的性质。从式(2.4)的积分形式可以看出,相位成形脉冲函数q(t)是时间的连续函数,这保证了CPM基带信号相位函数
![]() 的连续性,而且频率脉冲函数g(t)还决定了相位脉冲函数q(t)的波形;从式(2.8)可以看出,关联长度L影响了相位脉冲函数的编码特性,L越大引入的编码效应越明显。
的连续性,而且频率脉冲函数g(t)还决定了相位脉冲函数q(t)的波形;从式(2.8)可以看出,关联长度L影响了相位脉冲函数的编码特性,L越大引入的编码效应越明显。
2、CPM连续相位形成
CPM信号本质上仍是相位调制,CPM调制是将原始待发送二进制信息映射为CPM基带信号的连续相位,然后与载波进行相位调制。CPM基带信号相位![]() 形成过程是所有发送码元符号对相位成形脉冲函数q(t)的线性加权和,从表达式(2.4)可以看出,
形成过程是所有发送码元符号对相位成形脉冲函数q(t)的线性加权和,从表达式(2.4)可以看出,![]() 的形成过程与卷积的过程类似。因此,可以将
的形成过程与卷积的过程类似。因此,可以将![]() 形成过程看成是所有待发送码元符号与相位成形脉冲函数q(t)的类似卷积,即用相位成形脉冲函数q(t)对待发送的基带码元符号进行成形滤波,使其带限。下面对CPM信号的基带相位进行详细分析。
形成过程看成是所有待发送码元符号与相位成形脉冲函数q(t)的类似卷积,即用相位成形脉冲函数q(t)对待发送的基带码元符号进行成形滤波,使其带限。下面对CPM信号的基带相位进行详细分析。
将在第N个码元符号周期内进行分析,N为整数,且![]() ,即当前时刻
,即当前时刻![]() 。重写CPM基带信号的连续相位表达式如下:
。重写CPM基带信号的连续相位表达式如下:

由式(2.8)可知,脉冲成形函数q(t)在t<=0时为0,在t>=LT时取固定值1/2,所以式(2.14)可以展开乘如下形式:
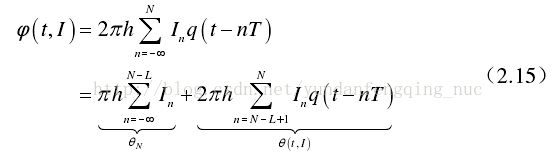
其中,![]() 是CPM基带信号的固定相位部分,称为固定相位,是区间(负无穷,N-L]内所有码元符号线性累加和对应的相位,其值在一个符号周期内固定不变,为h*pi的整数倍;
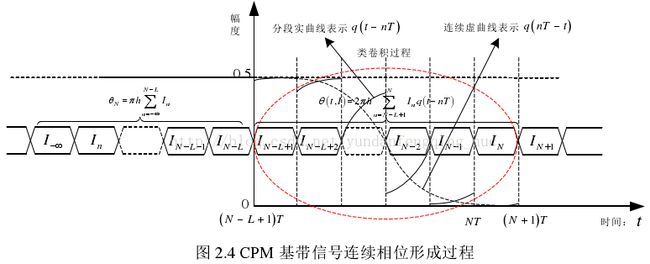
是CPM基带信号的固定相位部分,称为固定相位,是区间(负无穷,N-L]内所有码元符号线性累加和对应的相位,其值在一个符号周期内固定不变,为h*pi的整数倍;![]() 是CPM基带信号连续变化的部分,称为关联相位,是当前L个码元符号与相位脉冲的时变部分进行类卷积得到的。CPM基带信号相位成形过程如图所示,
是CPM基带信号连续变化的部分,称为关联相位,是当前L个码元符号与相位脉冲的时变部分进行类卷积得到的。CPM基带信号相位成形过程如图所示,![]() 可以表示成:
可以表示成:
二、GMSK调制实现
在MSK信号的基础上,为了改善信号的旁瓣衰减性能,人们提出了在MSK调制器前端增加一个滤波器进行预调制的设想,引出了最小高斯频移键控(GMSK)的思想。双极性脉冲序列在通过高斯低通滤波器后,其信号波形更加平滑,经MSK调制器调制后,产生的调制信号的相位路径更加平滑,功率谱的旁瓣衰减性能更好。下文主要讲述GMSK调制的实现及Matlab仿真。
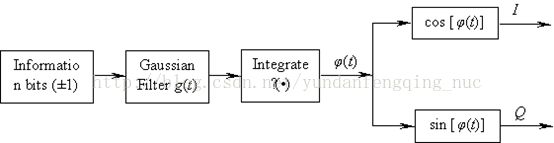
图2.5 GMSK调制器的实现
图2.5给出了GMSK调制器的原理框图。GMSK调制中的高斯滤波器通常是由滤波器的BT乘积、3db带宽B和符号持续时间T决定的。高斯滤波器的脉冲响应为
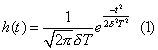
其中,
![]()
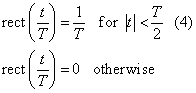
发送的信息比特bi(0/1)差分编码后变化为符号ai = +/-1。这些符号然后经过脉冲响应为g(t)的滤波器滤波
![]()
其中,表示卷积,
调制信号的相位为:
![]()
GMSK调制中h=1/2。
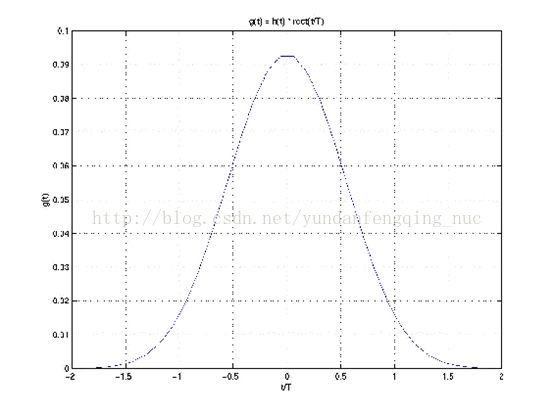
图2.6
从图2.6中可以看出,尽管脉冲响应函数g(t)的定义域为负无穷到正无穷,但是在|t|>2T区间上可以忽略,所以
假定|t|>2T区间上g(t)=0。由公式(3)可知,g(t)是非因果,不可实现的。所以假定|t|>2T区间上g(t)=0,将g(t)延时2T使得g(t)变成因果的。
Mtlab代码:
clc;
clear all;
close all;
burst = sign(randn(1 , 1000));
Tb = 1/19200;
OSR= 16;
BT = 0.3;
Ts = Tb/OSR;
PTV = -2*Tb:Ts:2*Tb;
RTV = -Tb/2:Ts:Tb/2;
sigma = sqrt(log(2))/(2*pi*BT);
gauss = (1/(sqrt(2*pi)*sigma*Tb))*exp(-PTV.^2/(2*sigma^2*Tb^2));
rect = 1/(2*Tb)*ones(size(RTV));
G_TEMP = conv(gauss,rect);
% TRUNCATING THE FUNCTION TO 3xTb
G = G_TEMP(OSR+1:4*OSR);
% TRUNCATION IMPLIES THAT INTEGRATING THE FREQUENCY PULSE
% FUNCTION WILL NOT EQUAL 0.5, HENCE THE RE-NORMALIZATION
G_FUN = (G-G(1))./(2*sum(G-G(1)));
% CALCULATE RESULTING PHASE PULSE
Q_FUN = cumsum(G_FUN);
参考文献:
1 http://www.embedded.com/print/4142719
2 《数据链物理层 CPM 波形调制解调技术研究与实现》 重庆大学硕士学位论文,作者:郭金超。
3 《突发 GMSK 信号分析与解调技术的研究与实现》 国防科技大学硕士学位论文,作者:朱磊。