第一个车载以太网应用-BMW 环视项目背景及历史 BMW Automotive Ethernet application background (2)
本文主要介绍,BMW 把车载以太网用在汽车上的第一个应用-360度环视的项目背景
BMW Internal Acceptance of UTSP Ethernet
1 Yet Another In-Vehicle Networking Technology
BMW was one of the first car manufacturers to introduce in-vehicle networking as such and one of the first to introduce CAN and LIN. BMW was a founding member of the LIN,FlexRay, and MOST consortia and the first car manufacturer to introduce MOST 25,FlexRay, and 100BASE-TX Ethernet in serial production cars. The company had especially invested in the MOST technology, and built up know-how and experts. Additionally, MOST 150 was going to offer a higher data rate than MOST 25 as well as better data/IP support. So, why adopt yet another networking technology?
It is true that BMW has invested a lot in in-vehicle networking technologies in the past. BMW is one of the innovation leaders in the industry and therefore always one of the first car manufacturers to need new in-vehicle networking technologies with different properties. After all, the in-vehicle networking provides an essential infrastructure for distributed applications. At the same time, having worked with all the networking systems means to have accumulated significant networking know-how, to have observed the increase in complexity in the systems, and to realize that to constantly completely change technologies is not sustainable in the long run. A more future-proof system was needed that is flexible, that scales, and that allows for reuse. The bandwidth requirement in cars is expected to continue to increase and it is no longer acceptable to constantly change the technology because of it.
Ethernet-based/IP-based in-vehicle networking provides all of this (see below figure). As it builds on the ISO/OSI layering model, changing to a higher data rate requires first changing the Physical Layer (PHY) technology only, while from the Data Link Layer (DLL) upwards the software can potentially be reused. It is also possible to use a different medium, e.g., like wireless or optical, without many changes. If a new protocol needs to be added on the application layers, this can be added without touching the layers below. Ethernet will eventually allow a reduction in the number of networking technologies as well as the
resources bound by them. Instead those resources will be able to focus on innovations with direct customer use.

At a higher level, Ethernet-based communication also addresses a general challenge the automotive industry faces: the ever increasing product differentiation combined with the trend toward shorter model and innovation cycles . Car manufacturers handle this by modularization and building block systems that allow designers to compose certain domains of a new car from sets of building blocks. The in-vehicle network has to support this. As was explained above, Ethernet-based communication provides for scalability in respect to data rates and transmission media. Additionally, a switched Ethernet network adds new
possibilities and flexibility to the networking design . A switched network can have all kinds of topologies and is not restricted to a ring or line. Increasing or reducing the number of ECUs is significantly simplified . Furthermore, Ethernet offers the possibility to separate networks virtually with the help of Virtual LANs (VLANs) even if they use the same physical network.
So, in principle, it was understood that Ethernet-based in-vehicle networking was the right way forward. The question was, how to introduce it on a larger scale into the vehicle? The application area that presented itself for the introduction was the infotainment domain. The first calculations that compared MOST 25 with shielded 100BASE-TX Ethernet however
did not yield any obvious cost advantage. In the end, how do you quantify “future-proof”? BroadR-Reach Ethernet was too new. The first measurement results were promising, but many voices also within BMW doubted that UTSP cabling would really work. On top the infotainment domain was/is seen as one of the keys for the customer experience of a car. The existing MOST solution had a well-established, automotive experienced supplier base. Ethernet, at that time, did not. Clearly, a different pilot application was needed in order to prove the feasibility, strength, and maturity of Automotive Ethernet and the BroadR-Reach
technology.
2 A Suitable Pilot Application
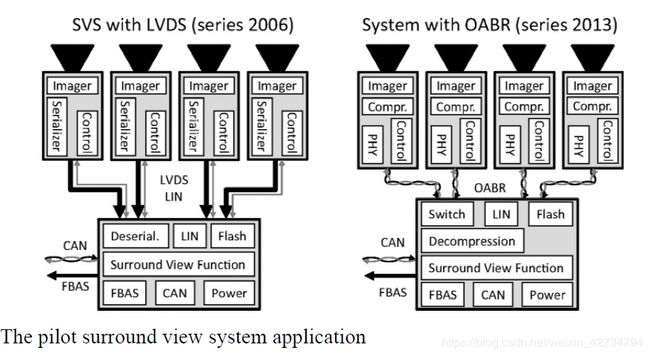
BMW chose to use the Surround View System (SVS) as a pilot application for BroadRReach/100BASE-T1 Ethernet. The purpose of a SVS is to show the surroundings of a car when it is being parked and in the following it is explained why the SVS was particularly suitable. The existing SVS system was already using digital LVDS/pixel links to transport the uncompressed data streams of each individual camera to the ECU for generating the surround view picture. This surround view picture was sent “ready to be displayed” to the Head Unit (HU) via an analog FBAS connection , while the HU sent its control data to the SVS via CAN. The SVS controlled the cameras via LIN. For risk minimization reasons in the pilot application, only the pixel links and the LIN control links were replaced by UTSP Ethernet, while the connection between SVS ECU and HU remained the same. As the Ethernet links provide with 100 Mbps a much smaller data rate than the pixel links even in
2009 – and a smaller data rate than the new High-Definition (HD) imager would generate – the video streams from the cameras needed to be compressed.
From the application point of view this raised two concerns: first, whether the loss of information caused by the compression would impair the performance of the image processing algorithms, and second, whether the latency introduced by compression and decompression would be acceptable. An early prototype that included the use of an Ethernet link with compression and decompression had been set up by the research department. The results were encouraging and the investigations were subsequently sufficiently refined to remove any concerns on the feasibility . Concerning the latency H.264 and Motion JPEG (MJPEG) were investigated. Not all modes of H.264 were suitable;
those suitable were not available in hardware at the time of investigation, though they yielded good results in simulation. In the end, it was the joint effort with the μC supplier Freescale (now NXP), which resulted in a product allowing for a low latency implementation using MJPEG compression, which sufficiently addressed the original concerns. So the SVS was selected as the pilot application. It turned out to serve as an optimal pilot use case for several reasons:
1)It held the right technical challenges. The main focus was on proving that the EMC requirements could be met using UTSP cabling also in a real life application. This included the selection of standard cables and connectors, the choice and development of a μC with low power dissipation and low EMC emissions , the decision on the transformers/common mode chokes (CMC)/filtering to use (or not to use), and the investigation of the influence of temperature changes . As the spatial constraints of a camera are particularly tight, a camera can be seen as a worst-case use case in respect to thermal influences and operating temperature. The small size of the camera was also be a challenge in terms of software, which needed to
reuse as much of available IT technology while at the same time it had to be portable onto the small embedded controller available . Last, but not least, the automotive qualification of all previously nonautomotive parts, like the BroadR-Reach semiconductors, had to be achieved.
2) It had an excellent business case. The cameras providing the respective images in a SVS need to be located in the extremities of the car. In consequence, the cables leading there are long, some pass through several inline connections and some end in wet areas, i.e., cables and connectors need to be water-resilient. Shielded Twisted Pair (STP) cabling as well as the respective shielded and partially waterproof connectors in small spaces result in significant costs. The Ethernet system required some more effort in the cameras due to the compression, but the savings in the harness more than outweighed
these extra costs . In fact, the OABR/100BASE-T1 Ethernet technology was the first high-performance networking technology that financed its introduction by what it saved, including interest. This is extremely unusual but also very helpful.
3)It was a low-risk application. In the first step, only the pixel links between cameras and SVS ECU were exchanged (see also Figure 3.7). The link between the SVS ECU and the HU stayed the same. This means that while offering a good business case and relevant technical challenges, the new Ethernet links did not impact the communication inside the rest of the car. In the worst case, there would have been a fall back. Note that the SVS generation following the here described pilot migrated also the SVS to HU connection to Ethernet.
4) It had optimal timing. The target SOP in 2013 meant that the SVS and the Ethernet connections were being developed two years ahead of the next new 7-series BMW with SOP in 2015. New functions and innovations are generally introduced top down. This meant that for the 2015 7-series BMW a more extended Ethernet in-vehicle network was of interest, so the proof of the network usability had to be provided in sufficient time before. The same introduction concept had successfully been used with FlexRay, so it was seen as the right way to proceed with Ethernet, too.
5) It proved the commitment. Some additional risk was seen in working with suppliers inexperienced in automotive. After all, automotive has a long return on investment period. It often takes four to five years after semiconductors have been developed,
before the first cent comes rolling back. Especially for companies who are based in the consumer industry, this is completely unheard of. Additionally, each car model is produced for about seven years and might need replacement parts for another 20 years. So, the car manufacturer has to trust not only the technical solution but also in the longterm commitment of the semiconductor supplier. The supplier can prove the commitment with a local support network, product roadmaps, etc. The pilot project offered a comfortable time window in which new suppliers were able to familiarize themselves as well as comply with the necessities of the automotive industry.
本文节选自《Automotive Ethernet》
作者Thomas Konigseder 2017年从BMW离职,加入Technica Engineering担任CTO;