ORB-SLAM2代码(四)特征点匹配
参考:orb-slam2源码注释版
orb-slam作为一款优秀的特征点slam方法,其特征点匹配好坏相当重要,直接关系到建图和定位的准确度。orb-slam中针对各种情况,设计了各种trick,以加速特征匹配,所以有必要学习下这些trick是如何使用的.
文章目录
- 1、特征点提取
- 1.1 特征点数目
- 1.2 fast角点
- 1.3 描述子
- 2、特征点匹配
- 2.1 *MonocularInitialization()* 中的 *SearchForInitialization()*
- 2.2 *TrackReferenceKeyFrame()* 中的 *SearchByBoW()*
- 2.3 *TrackWithMotionModel()* 中的 *SearchByProjection()*
- 2.4 *TrackLocalMap()*、*SearchLocalPoints()*,通过*SearchByProjection()*
- 2.5 *CreateNewMapPoints()* 中的 *SearchForTriangulation()*
- 2.6 *SearchInNeighbors()* 中的 *Fuse()*
1、特征点提取
orb特征点是对fast角点的改进,通过加入尺度和旋转的属性,使得orb特征点具备了尺度和旋转不变性.
1.1 特征点数目
每幅图像提取的特征点最大数目由nfeatures设置(比如,设置1000,但不表示实际测试每幅图像都能提取这么多特征点,达到300就不错了),而每一金字塔层选取特征点数目,随着金字塔层数越高(分辨率越低),按照等比系数1.0f/scaleFactor下降.
1.2 fast角点
在提取特征之前,先要获取原图像的金字塔层,一般划分8个左右的层,通过调用ComputePyramid()函数,使用resize()函数中的双线性插值方式进行降采样,存储在mvImagePyramid变量中,这期间没有进行高斯模糊,后面提取描述子的才会用到高斯模糊.
1) 对每一层图像划分30*30的栅格,在每个栅格内提取FAST角点,保证了角点分布的均匀,根据这一层的nfeatures使用DistributeOctTree()进行剔除. 而opencv自带的orb特征点检测,可能会造成特征点过于集中,这样对于tracking很不利,很容易就跟丢了.
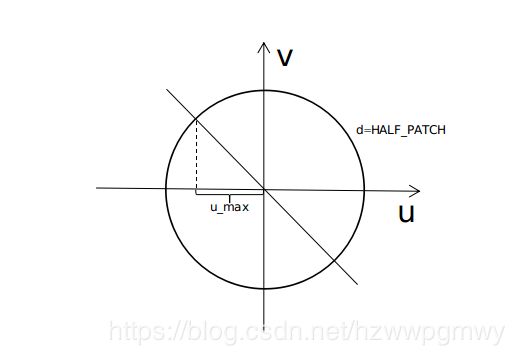
2)为了使fast角点具备旋转属性,使用IC_Angle()(灰度质心法)计算关键点的角度,选用的图像块PATCH_SIZE大小是31个像素,u_max是事先根据PATCH_SIZE计算的v在圆周上对应u的大小,代码实现也很简单,如下:
for (int v = 1; v <= HALF_PATCH_SIZE; ++v)
{
int v_sum = 0;
int d = u_max[v];
for (int u = -d; u <= d; ++u)
{
int val_plus = center[u + v*step], val_minus = center[u - v*step];
v_sum += (val_plus - val_minus); //计算上下的时候是有符号的,所以是减val_minus
m_10 += u * (val_plus + val_minus); //将(u,v)和(u,-v)两个点的像素一起计算,这边是m_10加,是由于u已经确定好了符号
}
m_01 += v * v_sum;
}
3)关键点剔除,使用4叉树
@todo
1.3 描述子
计算完关键点之后,既可以在每一个关键点附近计算描述子矩阵了,首先对各层图像进行高斯模糊GaussianBlur()(起到去噪声和平滑图像的作用),选取规则使用是一个静态数组,根据关键点的角度,对pattern对进行转换,然后再对转换后的这两个像素值的大小进行比较,一共计算256维,存到包含32个char类型的矩阵中
//使得该关键点(兴趣点和描述子)具有旋转不变性,因为都映射到同一个xy坐标系,计算出来的描述子当然也就具有旋转不变性
#define GET_VALUE(idx) \
center[cvRound(pattern[idx].x*b + pattern[idx].y*a)*step + \
cvRound(pattern[idx].x*a - pattern[idx].y*b)]
2、特征点匹配
ORB-SLAM2中特征点匹配均采用了各种技巧减小特征点匹配范围,特征点通过描述子匹配后会进行旋转一致性检测,并且要求最佳匹配特征点要明显优于次优匹配点.
2.1 MonocularInitialization() 中的 SearchForInitialization()
int ORBmatcher::SearchForInitialization(Frame &F1, Frame &F2, vector<cv::Point2f> &vbPrevMatched,
vector<int> &vnMatches12, int windowSize)
1)搜索范围
搜索尺度保持与上一帧同层,并且只对mInitialFrame和mCurrentFrame中的第0层特征点进行匹配,在窗口范围内,使用<上一帧的关键点坐标>在<当前帧该坐标>附近进行同层搜索,即下面代码里的vbPrevMatched[i1].x和vbPrevMatched[i1].y 是来自mInitialFrame,使用这个坐标在mCurrentFrame 周围windowSize半径范围内搜索
vector<size_t> vIndices2 = F2.GetFeaturesInArea(vbPrevMatched[i1].x,vbPrevMatched[i1].y,
windowSize,level1,level1);
2)候选关键点搜索
使用的是 GetFeaturesInArea() 函数,搜索半径范围由windowSize指定,找到以x、y为中心,边长为2r的方形内且在[minLevel, maxLevel]的特征点.
这里有一个加速寻找的trick,就是将整幅图像的所有特征点栅格化了,即通过frame构造函数里的AssignFeaturesToGrid()函数将特征点划分到对应的栅格内,这样,当寻找windowSize附近的特征点时,可以缩小范围. 主要功能代码如下
for(int ix = nMinCellX; ix<=nMaxCellX; ix++)
{
for(int iy = nMinCellY; iy<=nMaxCellY; iy++)
{
const vector<size_t> vCell = mGrid[ix][iy]; //取出该格子里的特征点ID vector
if(vCell.empty())
continue;
...
const float distx = kpUn.pt.x-x;
const float disty = kpUn.pt.y-y;
if(fabs(distx)<r && fabs(disty)<r)
vIndices.push_back(vCell[j]); //压栈
}
}
}
3)比例阈值进行筛选
最佳匹配比次佳匹配明显要好(使用mfNNratio进行控制),那么最佳匹配才真正靠谱,避免出现模棱两可、似是而非这种情况,mfNNratio通过ORBmatcher matcher(0.7,true);在构造时指定,值越小匹配越苛刻,根据情况选0.9或者0.7等
if(bestDist<=TH_LOW)
{
// 比次优的要好
if(bestDist<(float)bestDist2*mfNNratio)
{
if(vnMatches21[bestIdx2]>=0)
{
vnMatches12[vnMatches21[bestIdx2]] = -1;
nmatches--;
}
vnMatches12[i1]=bestIdx2;
vnMatches21[bestIdx2]=i1;
vMatchedDistance[bestIdx2]=bestDist; //赋值
nmatches++;
......
4)角度投票(旋转一致性)进行剔除误匹配
每个特征点在提取描述子时的旋转主方向角度,如果图像旋转了,这个角度将发生改变,所有的特征点的角度变化应该是一致的,通过直方图统计得到最准确的角度变化值
if(mbCheckOrientation)
{
float rot = kp.angle-F.mvKeys[bestIdxF].angle;// 该特征点的角度变化值
if(rot<0.0)
rot+=360.0f;
int bin = round(rot*factor);// 将rot分配到bin组
if(bin==HISTO_LENGTH)
bin=0;
assert(bin>=0 && bin<HISTO_LENGTH);
rotHist[bin].push_back(bestIdxF);
}
2.2 TrackReferenceKeyFrame() 中的 SearchByBoW()
int ORBmatcher::SearchByBoW(KeyFrame* pKF,Frame &F, vector<MapPoint*> &vpMapPointMatches)
1)使用词袋模型进行特征点匹配
使用词袋模型(BoW)进行特征点匹配使用的是direct index正向索引,反向索引inverse index则用于重定位和闭环检测中. 关于词袋模型,我放到另一篇博客单独介绍.
通过bow对pKF和F中的特征点进行快速匹配(不属于同一node的特征点直接跳过匹配),对属于同一node的特征点通过描述子距离进行匹配(暴力匹配,小范围内使用还是可以的),根据匹配,用pKF中特征点对应的MapPoint更新F中特征点对应的MapPoints.
2)筛选trick
同上,通过距离阈值(描述子距离)、比例阈值(最佳匹配比次佳匹配明显要好,那么最佳匹配才真正靠谱)和角度投票(旋转一致性)进行剔除误匹配.
2.3 TrackWithMotionModel() 中的 SearchByProjection()
int ORBmatcher::SearchByProjection(Frame &CurrentFrame, const Frame &LastFrame, const float th, const bool bMono)
根据速度模型可以估计当前帧的Tcw,将上一帧的MapPoints投影到当前帧,使用函数 GetFeaturesInArea() 搜索候选特征点,搜索范围(半径,windowSize),根据th和与特征点在上一帧时的尺度nLastOctave共同确定,搜索使用的最大最小层,根据前进和后退模型(仅对双目和RGBD有效)设定,实现代码如下:
int nLastOctave = LastFrame.mvKeys[i].octave; /** @attention 特征点出现在上一帧时的尺度*/
// Search in a window. Size depends on scale
float radius = th*CurrentFrame.mvScaleFactors[nLastOctave]; // 尺度越大,搜索范围越大
vector<size_t> vIndices2;
/** @attention */
// NOTE 尺度越大,图像越小
// 以下可以这么理解,例如一个有一定面积的圆点,在某个尺度n下它是一个特征点
// 当前进时,圆点的面积增大,在某个尺度m下它是一个特征点,由于面积增大,则需要在更高的尺度下才能检测出来
// 因此m>=n,对应前进的情况,nCurOctave>=nLastOctave。后退的情况可以类推
if(bForward) // 前进,则上一帧兴趣点在所在的尺度nLastOctave<=nCurOctave
vIndices2 = CurrentFrame.GetFeaturesInArea(u,v, radius, nLastOctave);
else if(bBackward) // 后退,则上一帧兴趣点在所在的尺度0<=nCurOctave<=nLastOctave
vIndices2 = CurrentFrame.GetFeaturesInArea(u,v, radius, 0, nLastOctave);
else // 在[nLastOctave-1, nLastOctave+1]中搜索
vIndices2 = CurrentFrame.GetFeaturesInArea(u,v, radius, nLastOctave-1, nLastOctave+1);
得到候选特征点之后,在投影点附近根据描述子距离选取匹配,以及最终的方向投票机制进行剔除,同上.
对于双目还需要检查在右相机像素坐标系下,MapPoint在当前帧上投影位置与候选特征点u方向的距离是否是radius范围内.
if(CurrentFrame.mvuRight[i2]>0)
{
// 双目和rgbd的情况,需要保证右图的点也在搜索半径以内
const float ur = u - CurrentFrame.mbf*invzc;
const float er = fabs(ur - CurrentFrame.mvuRight[i2]); /** @todo */
if(er>radius)
continue;
}
2.4 TrackLocalMap()、SearchLocalPoints(),通过SearchByProjection()
SearchByProjection(Frame &F, const vector<MapPoint*> &vpMapPoints, const float th)
只对除了 TrackReferenceKeyFrame() 函数中匹配上的MapPoint以外的local MapPoint进行 SearchByProjection(),以向mCurrentFrame增加新的MapPoint
注意,MapPoint与当前帧上的特征点进行匹配时,使用的是该MapPoint的最适合的描述子(通过函数 ComputeDistinctiveDescriptors() 计算得到,先获得当前点的所有描述子,然后计算描述子之间的两两距离,最好的描述子与其他描述子应该具有最小的距离中值)
1)计算当前视角和平均视角夹角的余弦值
Local MapPoint这么多,究竟选择那些进行筛选呢,当然是选择能投影到当前帧中那些mapPoint,使用函数 isInFrustum() 完成这个工作,通过计算<该MapPoint与当前帧的相机中心连线>与该MapPoint的平均观测法向量mNormalVector夹角的余弦值,来判断当前帧是否能看到该MapPoint,阈值选择为0.5,即表示小于cos(60),夹角大于60度就pass掉MapPoint.
// Check viewing angle
// V-D 2) 计算当前视角和平均视角夹角的余弦值, 若小于cos(60), 即夹角大于60度则返回
cv::Mat Pn = pMP->GetNormal();
const float viewCos = PO.dot(Pn)/dist;
if(viewCos<viewingCosLimit)
return false;
// Predict scale in the image
// V-D 4) 根据深度预测尺度(对应特征点在一层)
const int nPredictedLevel = pMP->PredictScale(dist,this);
2)根据深度估计MapPoint在当前帧下所属的层
根据该MapPoint在当前帧中,距离相机光心的距离进行判断,代码如下:
int MapPoint::PredictScale(const float ¤tDist, Frame* pF)
{
float ratio;
{
unique_lock<mutex> lock(mMutexPos);
ratio = mfMaxDistance/currentDist;
}
int nScale = ceil(log(ratio)/pF->mfLogScaleFactor);
if(nScale<0)
nScale = 0;
else if(nScale>=pF->mnScaleLevels)
nScale = pF->mnScaleLevels-1;
return nScale;
}
3)候选关键点搜索
使用函数 GetFeaturesInArea() 搜索候选特征点,搜索范围(注意跟上面几种方式的区别),根据1)中计算的夹角和2)中估计的层共同决定:
- 夹角越小,范围越小,代码如下
- 层越高,范围越大
float ORBmatcher::RadiusByViewingCos(const float &viewCos)
{
if(viewCos>0.998)
return 2.5;
else
return 4.0;
}
最后根据比例阈值(最佳匹配比次佳匹配明显要好,那么最佳匹配才真正靠谱)进行帅选,同上.
2.5 CreateNewMapPoints() 中的 SearchForTriangulation()
int ORBmatcher::SearchForTriangulation(KeyFrame *pKF1, KeyFrame *pKF2, cv::Mat F12,
vector<pair<size_t, size_t> > &vMatchedPairs, const bool bOnlyStereo)
因为在local mapping线程中,关键帧的位姿已经相当准确了,即F12也是比较准确的,所以可以使用三角化生成新的MapPoint,匹配使用的是BoW,筛选部分使用了对极点邻域剔除、极线约束、角度投票(旋转一致性)进行剔除误匹配.
1)对极点邻域剔除
该特征点距离极点太近,表明kp2对应的MapPoint距离pKF1相机太近,所以也要剔除
if(!bStereo1 && !bStereo2)
{
const float distex = ex-kp2.pt.x;
const float distey = ey-kp2.pt.y;
if(distex*distex+distey*distey < 100*pKF2->mvScaleFactors[kp2.octave])
continue;
}
2)极线约束
使用对极约束,得到 p 1 T F 12 p 2 = 0 p_1^TF_{12}p_2=0 p1TF12p2=0 ,那么 p 1 T F 12 p_1^TF_{12} p1TF12 将构成kp1在pKF2上的极线,然后计算kp2到该极线的距离,就对二者是否能够匹配上进行初步筛选,代码如下:
// kp1来自mpCurrentKeyFrame,kp2来自共视图
bool ORBmatcher::CheckDistEpipolarLine(const cv::KeyPoint &kp1,const cv::KeyPoint &kp2,const cv::Mat &F12,const KeyFrame* pKF2)
{
// Epipolar line in second image l = x1'F12 = [a b c]
// 求出kp1在pKF2上对应的极线
const float a = kp1.pt.x*F12.at<float>(0,0)+ kp1.pt.y*F12.at<float>(1,0)+ F12.at<float>(2,0);
const float b = kp1.pt.x*F12.at<float>(0,1)+ kp1.pt.y*F12.at<float>(1,1)+ F12.at<float>(2,1);
const float c = kp1.pt.x*F12.at<float>(0,2)+ kp1.pt.y*F12.at<float>(1,2)+ F12.at<float>(2,2);
// 计算kp2特征点到极线的距离:
// 极线l:ax + by + c = 0
// (u,v)到l的距离为: |au+bv+c| / sqrt(a^2+b^2)
const float num = a*kp2.pt.x+b*kp2.pt.y+c;
const float den = a*a+b*b;
if(den==0)
return false;
const float dsqr = num*num/den;
/** @attention 尺度越大,范围应该越大!*/
/** @attention 金字塔最底层一个像素就占一个像素,在倒数第二层,一个像素等于最底层1.2个像素(假设金字塔尺度为1.2)*/
return dsqr < 3.84*pKF2->mvLevelSigma2[kp2.octave]; //阈值要根据尺度调整
}
2.6 SearchInNeighbors() 中的 Fuse()
这一步跟上面说到的SearchLocalPoints() 中的 SearchByProjection() 基本一样,会依次检查MapPoint在关键帧上投影的像素范围、深度范围、夹角小于60度、层检查、距离检查(chi2小于5.99)、描述子检查,最后找到该MapPoint在该区域最佳匹配的特征点,如果MapPoint能匹配关键帧的特征点,并且该点有对应的MapPoint,那么将两个MapPoint合并(选择观测数多的),如果MapPoint能匹配关键帧的特征点,并且该点没有对应的MapPoint,那么为该点添加MapPoint.
最后,一图以蔽之

<完>
@leatherwang