基于FPGA灰度图像高斯滤波算法的实现
基于FPGA灰度图像高斯滤波算法的实现
欢迎添加QQ:2639406604一起交流
1.内容概要
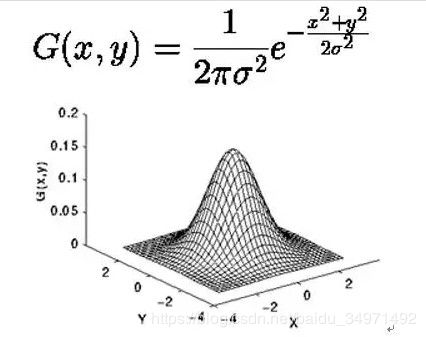
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。高斯滤波的具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。
一位高斯分布:

二位高斯分布:
高斯滤波后图像被平滑的程度取决于标准差。它的输出是临域像素的加权平均,同时离中心越近的像素权重越高。因此,相对于均值滤波(mean filter)它的平滑效果更柔和,而且边缘保留的也更好。
高斯滤波被用作为平滑滤波器的本质原因是因为它是一个低通滤波器,而且大部份基于卷积平滑滤波器都是低通滤波器。
GAUSS 滤波算法克服了边界效应,因而滤波后的图像较好。
2.高斯滤波算法实现步骤
1 4 7 4 1
4 16 26 16 4
7 26 41 26 7
4 16 26 16 4
1 4 7 4 1
(1/273) *
高斯滤波5x5算子
1 2 1
2 4 2
1 2 1
(1/16)*
高斯滤波3x3算子
1>串行像素形成3x3矩阵
(x-1,y-1) (x,y-1) (x+1,y-1)
(x-1,y) (x,y) (x+1,y)
(x-1,y+1) (x,y+1) (x+1,y+1)
f(x,y)表示(x,y)点的像素值;
g(x,y)表示(x,y)点经过高斯滤波处理后的值;
2>用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值
g(x,y)=(1/16)* (f(x-1,y-1)+2f(x,y-1)+f(x+1,y-1)
+2f(x-1,y)+4f(x,y) + 2f(x+1,y)+
f(x-1,y+1)+2f(x,y+1)+f(x+1,y+1))------------------------------(1)
3>用模板扫描图像中的每一个像素
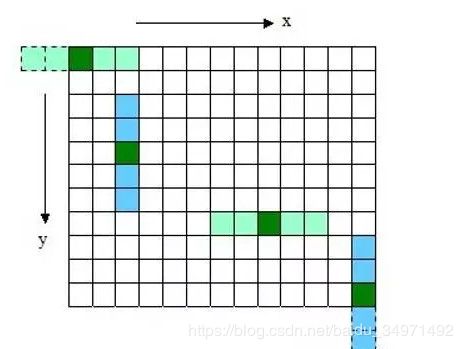
如图1所示,使用高斯滤波模板从屏幕的左上角(从左到右),没扫完一行换下一行(从上到下)扫完整个屏幕,最终完成一帧图的高斯滤波。
3.FPGA实现
首先将RGB图像转换成Gray图像
方法1:
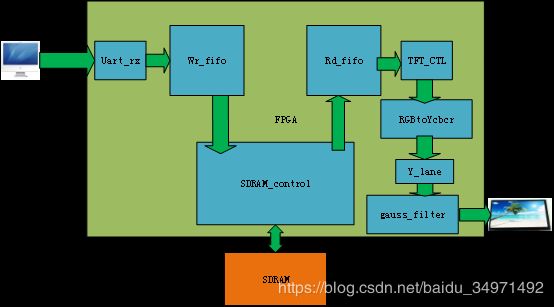
如图2所示,使用R/G/B单通道形成灰度图像进入高斯滤波模块。
方法二:
如图3所示,使用RGB图像转换成Ycbcr的图像的Y通道形成灰度图像进入高斯滤波模块。
源码:
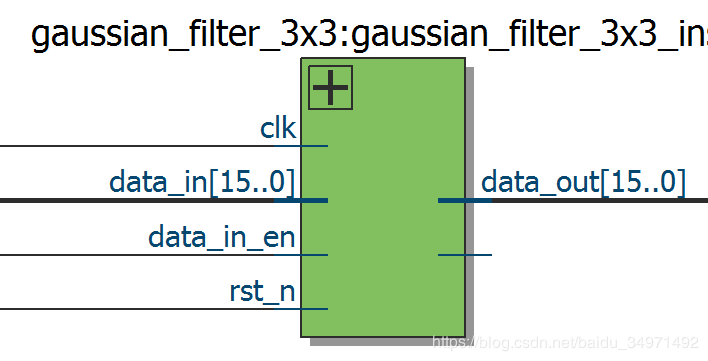
`timescale 1ns/1ps
module gaussian_filter_3x3(
input clk, //pixel clk
input rst_n,
input [15:0] data_in, //16 bit RGB565 pixel
input data_in_en,
output reg [15:0] data_out,
output data_out_en
);
//------------------------------------
// 形成三行像素缓存
//-----------------------------------
wire [15:0] line0;
wire [15:0] line1;
wire [15:0] line2;
//-----------------------------------------
//形成3x3像素矩阵
//-----------------------------------------
reg [15:0] line0_data0;
reg [15:0] line0_data1;
reg [15:0] line0_data2;
reg [15:0] line1_data0;
reg [15:0] line1_data1;
reg [15:0] line1_data2;
reg [15:0] line2_data0;
reg [15:0] line2_data1;
reg [15:0] line2_data2;
//---------------------------------------------
// shift_ram IP 形成三行像素缓存
//---------------------------------------------
line3x3 line3x3_inst(
.clken(data_in_en),
.clock(clk),
.shiftin(data_in),
.shiftout(),
.taps0x(line0),
.taps1x(line1),
.taps2x(line2)
);
//----------------------------------------------------------------------
// Form an image matrix of three multiplied by three
//---------------------------------------------------------------------
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
line0_data0 <= 16'b0;
line0_data1 <= 16'b0;
line0_data2 <= 16'b0;
line1_data0 <= 16'b0;
line1_data1 <= 16'b0;
line1_data2 <= 16'b0;
line2_data0 <= 16'b0;
line2_data1 <= 16'b0;
line2_data2 <= 16'b0;
end
else if(data_in_en) begin //像素有效信号
line0_data0 <= line0;
line0_data1 <= line0_data0;
line0_data2 <= line0_data1;
line1_data0 <= line1;
line1_data1 <= line1_data0;
line1_data2 <= line1_data1;
line2_data0 <= line2;
line2_data1 <= line2_data0;
line2_data2 <= line2_data1;
end
end
//---------------------------------------------------------------------------------------------------------------
// 计算最终结果
//---------------------------------------------------------------------------------------------------------------
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
data_out <= 16'b0;
else if(data_in_en)
data_out <= (line0_data0 + line0_data1*2 + line0_data2 + line1_data0*2 + line1_data1*4 + line1_data2*2 + line2_data0 + line2_data1*2 + line2_data2)>>4;
//data_out <= line2_data1;
else ;
end
endmodule
仿真代码:
`timescale 1ns/1ps
`define CLK_PERIOD 20
module gaussian_filter_3x3_tb();
reg clk;
reg rst_n;
reg [15:0] data_in;
reg data_in_en;
wire [15:0] data_out;
wire data_out_en;
gaussian_filter_3x3 gaussian_filter_3x3_inst(
.clk(clk),
.rst_n(rst_n),
.data_in(data_in),
.data_in_en(data_in_en),
.data_out(data_out),
.data_out_en(data_out_en)
);
initial begin
clk = 0;
rst_n = 0;
data_in_en = 0;
#(`CLK_PERIOD*10);
rst_n = 1;
#(`CLK_PERIOD*10);
data_in_en = 1;
#(`CLK_PERIOD*10000);
$stop;
end
always #(`CLK_PERIOD/2) clk = ~clk;
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
data_in <= 16'd0;
else if(data_in_en)
if(data_in == 16'd479)
data_in <= 16'd0;
else
data_in <= data_in + 16'd1;
else
;
end
endmodule
仿真结果:
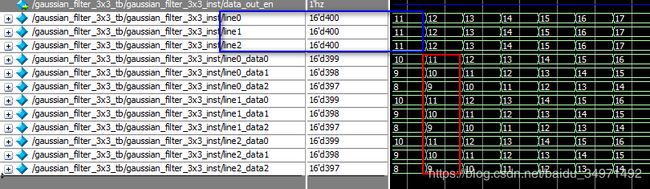
由图5蓝色框数据可知,IP缓存了三行一模一样的数据,形成了三行数据的缓存;
由红色框可知,一个时钟形成了(x,y)为中心的3x3像素矩阵。
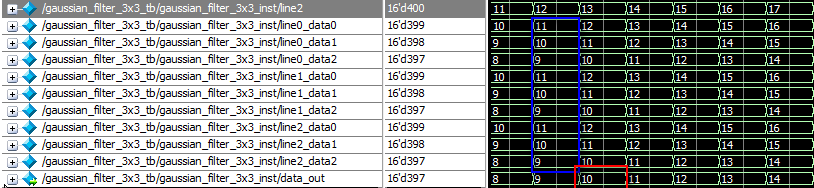
由图6的蓝色框我们可以知道九个像素点为[11,10,9;11,10,9;11,10,9]有公式(1)计算可得10,与红色框里边的结果一致。
实验结果:

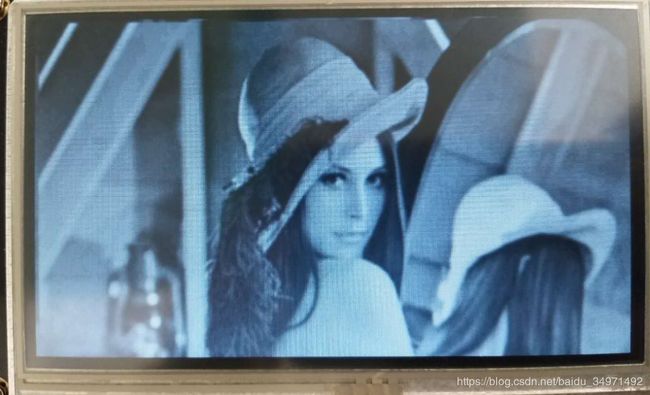
总结:
至此,基于FPGA的三大图像滤波(均值滤波、中值滤波、高斯滤波)处理已经讲解完毕,其中的图像处理效果需要大家自己去实验,去对比。手机拍摄出来的毕竟有差距。
FPGA在前端捕获到数据后首先要对视频图像做一个预处理,然后根据噪声的来源,针对椒盐噪声进行中值滤波,针对高斯噪声进行高斯滤波处理,均值滤波在图像处理中也很常见。
欢迎关注微信公众号:FPGA开源工作室
获取更多学习资料。
