GPS和RTK的基本知识
RTK的基本原理介绍,RTK一般由基站、移动站以及数据链路组成。
下文摘自天宝(Trimble)官网。
原文链接:http://www.trimble.com/OEM_ReceiverHelp/V4.44/en/
What is RTK?
Real-Time Kinematic (RTK) positioning is positioning that is based on at least two GPS receivers—a base receiver and one or more rover receivers. The base receiver takes measurements from satellites in view and then broadcasts them, together with its location, to the rover receiver(s). The rover receiver also collects measurements to the satellites in view and processes them with the base station data. The rover then estimates its location relative to the base.
The key to achieving centimeter-level positioning accuracy with RTK is the use of the GPS carrier phase signals. Carrier phase measurements are like precise tape measures from the base and rover antennas to the satellites. In the receiver, carrier phase measurements are made with millimeter-precision. Although carrier phase measurements are highly precise, they contain an unknown bias, termed the integer cycle ambiguity, or carrier phase ambiguity. The rover has to resolve, or initialize, the carrier phase ambiguities at power-up and every time that the satellite signals are interrupted.
Carrier phase initialization
The receiver can automatically initialize the carrier phase ambiguities as long as at least five common satellites are being tracked at base and rover sites. Automatic initialization is sometimes termed On-The-Fly (OTF) or On-The-Move, to reflect that no restriction is placed on the motion of the rover receiver throughout the initialization process.
The receiver uses L1 (or for dual-frequency receivers L1 and L2) carrier-phase measurements plus precise code range measurements to the satellites to automatically initialize the ambiguities. The initialization process generally takes a few seconds.
As long as at least four common satellites are continuously tracked after a successful initialization, the ambiguity initialization process does not have to be repeated.
Tip: Initialization time depends on baseline length, multipath, and prevailing atmospheric errors. To minimize the initialization time, keep reflective objects away from the antennas, and make sure that baseline lengths and differences in elevation between the base and rover sites are as small as possible.
Update rate and latency
The number of position fixes delivered by an RTK system per second also defines how closely the trajectory of the rover can be represented and the ease with which position navigation can be accomplished. The number of RTK position fixes generated per second defines the update rate. Update rate is quoted in Hertz (Hz). The maximum update rate will vary based on the receiver used and the options purchased, and will range between 5 Hz and 50 Hz.
Solution latency refers to the lag in time between when the satellite measurements were made and when the position was displayed or output. For precise navigation, it is important to have prompt position estimates, not values from 2 seconds ago. Solution latency is particularly important when guiding a moving vehicle. For example, a vehicle traveling at 25 km/h moves approximately 7 m/s. Thus, to navigate to within 1 m, the solution latency must be less than 1/7 (= 0.14) seconds. For the BD9xx receivers, the latency is less than 0.02 seconds in low-latency mode.
Data link
The base-to-rover data link serves an essential role in an RTK system. The data link must transfer the base receiver carrier phase, code measurements, plus the location and description of the base station, to the rover.
The receiver supports two data transmission standards for RTK positioning: the Compact Measurement Record (CMR) format and the RTCM/RTK messages. The CMR format was designed by Trimble and is supported across all Trimble RTK products.
CAUTION: Mixing RTK systems from different manufacturers usually results in degraded performance.
Factors to consider when choosing a data link include:
- Throughput capacity
- Range
- Duty cycle
- Error checking/correction
- Power consumption
The data link must support at least 4800 baud, and preferably 9600 baud throughput. Your Trimble representative can assist with questions regarding data link options.
Moving baseline RTK positioning
In most RTK applications, the reference receiver remains stationary at a known location, and the rover receiver moves. However, Moving Baseline RTK is an RTK positioning technique in which both reference and rover receivers can move. The receiver uses the Moving Baseline RTK technique to determine the heading vector between its two antennas. Internally raw code and carrier measurements from GPS and GLONASS satellites are processed at a rate up to 10 Hz when linking two independent receivers. The BD982 and BX982 can produce 50Hz moving baseline solutions.
Moving baseline RTK can be used in applications where the relative vector between two antennas is precisely known to centimeter level, while the absolute position of the antennas will depend on the accuracy of the positioning service it uses (RTK, OmniSTAR, DGPS, SBAS, or Autonomous).
Critical factors affecting RTK accuracy
The following sections present system limitations and potential problems that could be encountered during RTK operation.
Base station receiver type
CAUTION Trimble recommends that you always use a Trimble base station with a BD9xx roving receiver. Using a non-Trimble base receiver can result in suboptimal initialization reliability and RTK performance.
The receiver uses a state-of-the-art tracking scheme to collect satellite measurements. The receiver is compatible with all other Trimble RTK-capable systems.
Base station coordinate accuracy
The base station coordinates should be known to within 10 m in the WGS-84 datum for optimal system operation. Incorrect or inaccurate base station coordinates degrade the rover position solution. It is estimated that every 10 m of error in the base station coordinates introduces one part per million error in the baseline vector. This means that if the base station coordinates have a height error of 50 m, and the baseline vector is 10 km, then the additional error in the rover location is approximately 5 cm, in addition to the typical specified error. One second of latitude represents approximately 31 m on the earth surface; therefore, a latitude error of 0.3 seconds equals a 10 m error on the earth’s surface. The same part per million errors apply to inaccuracies of the base station’s latitude and longitude coordinates.
Number of visible satellites
A GNSS position fix is similar to a distance resection. Satellite geometry directly impacts on the quality of the position solution estimated by the receiver. The Global Positioning System is designed so that at least 5 satellites are above the local horizon at all times. For many times throughout the day, as many as 8 or more satellites might be above the horizon. Because the satellites are orbiting, satellite geometry changes during the day, but repeats from day-to-day.
A minimum of 4 satellites are required to estimate user location and time. If more than 4 satellites are tracked, then an over-determined solution is performed and the solution reliability can be measured. The more satellites used, the greater the solution quality and integrity.
The Position Dilution Of Precision (PDOP) provides a measure of the prevailing satellite geometry. Low PDOP values, in the range of 4.0 or less, indicate good satellite geometry, whereas a PDOP greater than 7.0 indicates that satellite geometry is weak.
Even though only 4 satellites are needed to form a three-dimensional position fix, RTK initialization demands that at least 5 common satellites must be tracked at base and rover sites. Furthermore, L1 and L2 carrier phase data must be tracked on the 5 common satellites for successful RTK initialization. Once initialization has been gained, a minimum of 4 continuously tracked satellites must be maintained to produce an RTK solution.
When additional constellations such as GLONASS are tracked, one of the satellites will be used to resolve the timing offsets between that constellation and the GPS constellation. Tracking additional satellites will aid in the RTK solution.
Elevation mask
The elevation mask stops the receiver from using satellites that are low on the horizon. Atmospheric errors and signal multipath are largest for low elevation satellites. Rather than attempting to use all satellites in view, the receiver uses a default elevation mask of 10 degrees. By using a lower elevation mask, system performance may be degraded.
Environmental factors
Environmental factors that impact GPS measurement quality include:
- Ionospheric activity
- Tropospheric activity
- Signal obstructions
- Multipath
- Radio interference
High ionospheric activity can cause rapid changes in the GPS signal delay, even between receivers a few kilometers apart. Equatorial and polar regions of the earth can be affected by ionospheric activity. Periods of high solar activity can therefore have a significant effect on RTK initialization times and RTK availability.
The region of the atmosphere up to about 50 km is called the troposphere. The troposphere causes a delay in the GPS signals which varies with height above sea level, prevailing weather conditions, and satellite elevation angle. The receiver includes a tropospheric model which attempts to reduce the impact of the tropospheric error. If possible, try to locate the base station at approximately the same elevation as the rover.
Signal obstructions limit the number of visible satellites and can also induce signal multipath. Flat metallic objects located near the antenna can cause signal reflection before reception at the GPS antenna. For phase measurements and RTK positioning, multipath errors are about 1 to 5 cm. Multipath errors tend to average out when the roving antenna is moving while a static base station may experience very slowly changing biases. If possible, locate the base station in a clear environment with an open view of the sky. If possible use an antenna with a ground plane to help minimize multipath.
The receiver provides good radio interference rejection. However, a radio or radar emission directed at the GPS antenna can cause serious degradation in signal quality or complete loss of signal tracking. Do not locate the base station in an area where radio transmission interference can become a problem.
Operating range
Operating range refers to the maximum separation between base and rover sites. Often the characteristics of the data link determine the RTK operating range. There is no maximum limit on the baseline length for RTK with the receiver, but accuracy degrades and initialization time increases with range from the base. Specifications given for receivers specify the distance within which those specifications are valid, and specifications are not given beyond that range.
DGPS
The receiver supports output and input of differential GPS (DGPS) corrections in the RTCM SC-104 format. This allows position accuracies of less than 1 meter to be achieved using the L1 frequencies of GPS and GLONASS.
SBAS
The receiver supports SBAS (satellite based augmentation systems) that conform to RTCA/DO-229C, such as WAAS, EGNOS, or MSAS. The receiver can use the WAAS (Wide Area Augmentation System) set up by the Federal Aviation Administration (FAA). WAAS was established for flight and approach navigation for civil aviation. WAAS improves the accuracy, integrity, and availability of the basic GPS signals over its coverage area, which includes the continental United States and outlying parts of Canada and Mexico.
SBAS can be used in surveying applications to improve single point positioning when starting a reference station, or when the RTK radio link is down. SBAS corrections should be used to obtain greater accuracy than autonomous positioning, not as an alternative to RTK positioning.
The SBAS system provides correction data for visible satellites. Corrections are computed from ground station observations and then uploaded to two geostationary satellites. This data is then broadcast on the L1 frequency, and is tracked using a channel on the BD9xx receiver, exactly like a GPS satellite.
For more information on WAAS, refer to the FAA home page at http://gps.faa.gov.
Note – To receive SBAS corrections, you must be within the official service volume of that SBAS service. Receiver manufacturers often set SBAS correction volumes to be slightly larger than the ones specified by the respective SBAS service but this may depend on each receiver manufacturer. For example, Trimble receivers situated in the MSAS correction zones can use MSAS corrections between the latitudes 20 and 60 degrees North and between longitudes 120 and 150 degrees East. Hence, receivers situated in Shanghai will track and use MSAS while a receiver situated in Beijing will track but not use MSAS corrections.
Antenna Phase Centers
To understand antenna phase centers (APC) and antenna reference points (ARP), let’s begin with a diagram of an antenna.
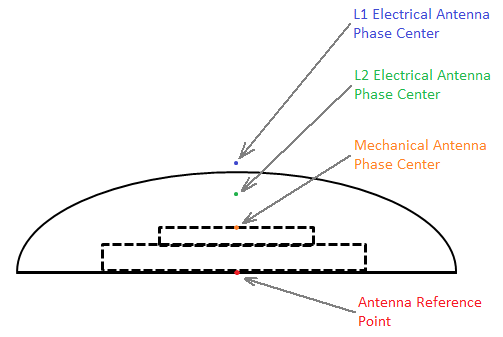
The antenna reference point is typically the point on the centerline of the antenna at the mounting surface. Above the antenna reference point is the mechanical antenna phase center, this is the physical point on the surface of the antenna element where the antenna phase center electronics reside. The actual antenna phase centers for L1 and L2 frequencies are points (or clouds) in space, typically above the mechanical antenna phase center.
The GNSS receiver reduces all of the measurements at the L1 and L2 antenna phase centers to the mechanical antenna phase center. The GNSS receiver outputs the coordinates for the mechanical antenna phase center in all of its output measurements. If you wish to further reduce the output coordinates (for example reduce them to the antenna reference point) you must do this reduction in your software applications, taking into account factors such as tilt of the antenna.
The GNSS receiver has an interface to setup the antenna type, antenna height, and antenna measurement method. The entered antenna height and antenna measurement method values are only applied when setting the GNSS receiver up as a base station, since the CMR or RTCM correction message outputs the coordinate of the base stations’ mechanical antenna phase center. However, typically only the coordinates of the ground station which the antenna is setup over are known). Entering the antenna height and antenna measurement method enables the software to calculate the height of the mechanical antenna phase center above the ground station.
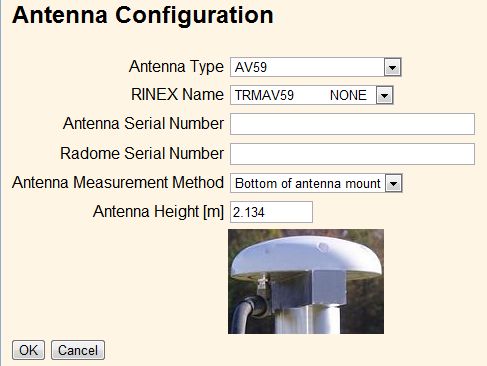
When the Antenna Type field is set, the value of the RINEX Name field is automatically set, and vice-versa.
Setting the proper antenna type slightly improves the accuracy of the GNSS receiver, since the L1 and L2 antenna phase center offsets are known and accounted for. In addition, the antenna model accounts for elevation-dependent biases of the antenna, so that the satellite tracking is corrected at various elevation angles.
If you want to know the offsets between the antenna reference point and the various antenna phase centers, Trimble recommends using the Configuration Toolbox software. In Configuration Toolbox you can add the Antenna page and then select the antenna type:
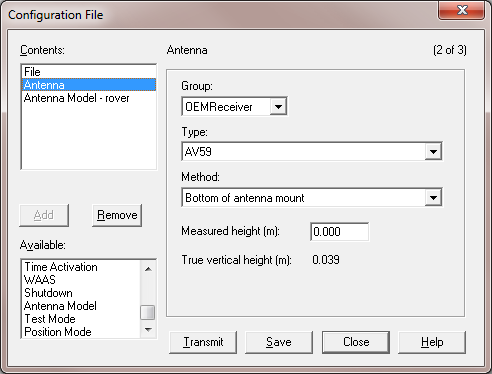
If you select “Bottom of antenna mount” in the Method field, the True vertical height field shows the distance between the antenna reference point and the mechanical antenna phase center.
If you want to understand the location of the L1 and L2 antenna phase centers with respect to the mechanical antenna phase center, add the Antenna Model page and then select the antenna type. Click the L1 Model Calibration or L2 Model Calibration button to view the offsets and the elevation-dependent tracking biases:
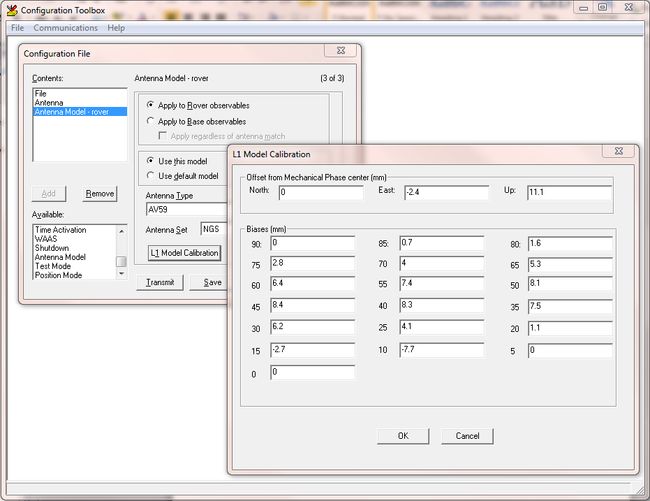
These antenna calibrations are automatically used by the receiver when the correct antenna type is selected. You only need to add the Antenna Model page if you want to over-ride the antenna models. Trimble recommends using the default antenna models.