ROS学习路(篇二)话题消息的定义与使用
1、自定义消息类型
打开catkin_ws/src/learning_topic/src路径:
~$ cd ~/catkin_ws/src/learning_topic/src
然后创建msg文件夹存放自定义的消息文件Person.msg。
string name
uint8 sex
uint8 age
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
定义好之后依次修改learning_topic下的package.xml和CMakeList.txt文件,以让刚创建的msg文件可以被编译。
在pachage.xml中添加两行代码:
message_generation
message_runtime
这两行代码声明了编译和执行时所依赖的包。
package.xml文件修改如下:

同样的,在CMakeList.txt中做对应修改,在find_package下添加message_generation:
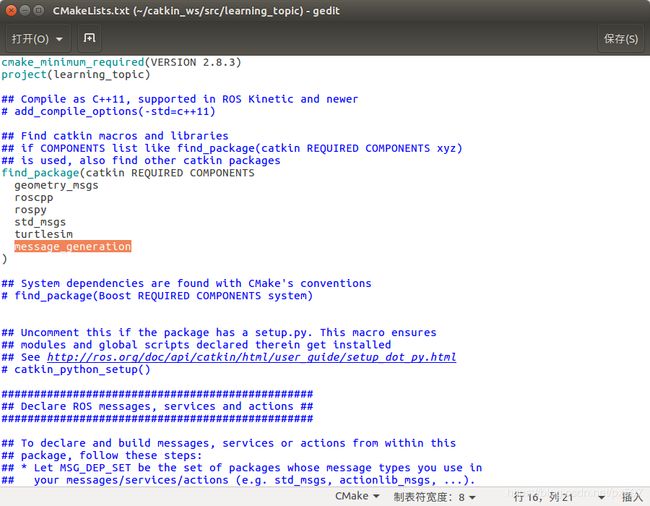
并在 ## Declare ROS messages, services and actions## 下添加下列代码:
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
完成后,回到工作空间下,并编译整个工作空间。
~$ cd ~/catkin_ws
~$ catkin_make
至此,自定义消息的工作就完成了,总结一下,流程为:
1、创建文件夹,自定义消息类型(本质是结构体的定义,消息是以结构体为单位传输的,但要符合ros的规则,如uint8等关键字);
2、修改pakage.xml和CMakeList.txt文件,本质就是修改编译规则,自定义的消息类型要在编译时可以被正确编译、解读。
2、添加发布者和订阅者
在learning_topic/src下添加发布者代码person_publisher.cpp:
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include 同路径下添加订阅者代码person_subscriber.cpp:
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include 修改CMakeList.txt,添加下面六行代码,说明编译规则:

完成后编译,启动订阅者和发布者,运行成功。
3、总结
不管是自定义的消息还是订阅者和发布者,其流程都是一样的:
1、建立规则文件:
订阅者和发布者就是建立cpp源文件,定义名称、规则、回调函数等;
消息就是建立消息文件,定义新的消息类型应该是什么样的消息,具有什么样的规则;
2、建立好规则文件或者说源文件后,就是修改package.xml和CMakeList.txt文件,添加运行和编译应该依赖的包、编译时应该链接的库。