zynq-7z035实现PS对PL端的BRAM的读写实验
0、参考资料
原子哥网站的一些教学pdf
1、实验任务
通过PS的串口,向PS发送数据,PS将收到的数据给PL并且写入到BRAM中,然后同时,也能够读取BRAM中的数据返回到串口中。同时为了,实现ILA的在线的分析的功能,新增加手动的bram 控制模块,对bram 进行读写的控制。
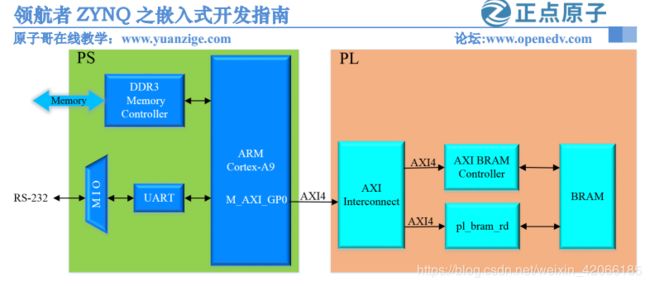
2、实验结构图
具体的接口如下图所示
3、实验过程
3.1 建立vivado工程(示例版本)
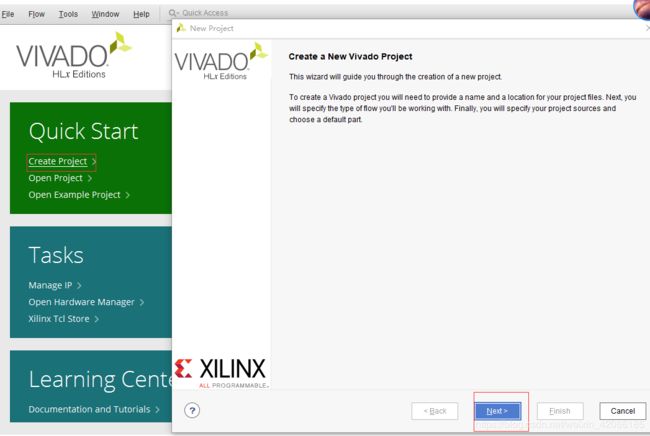
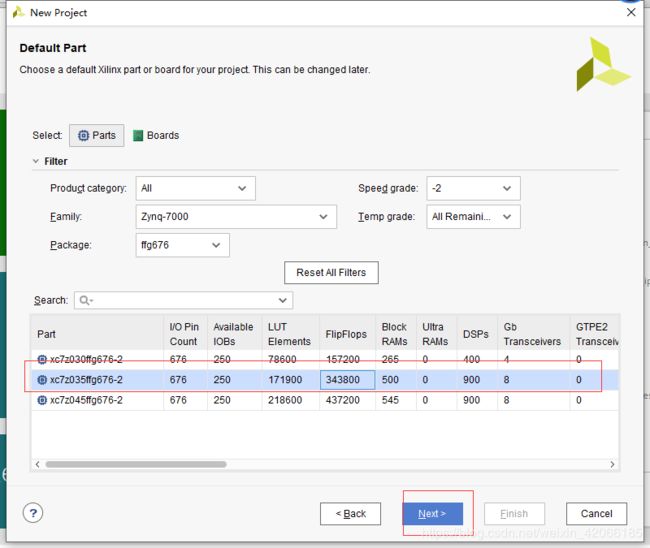
1、建立工程,并且选择对应的器件
2、建立一个ps的处理zynq-配置ddr3 的兼容性,并且增加一个用于调试uart0--使用的是端口14 和 15
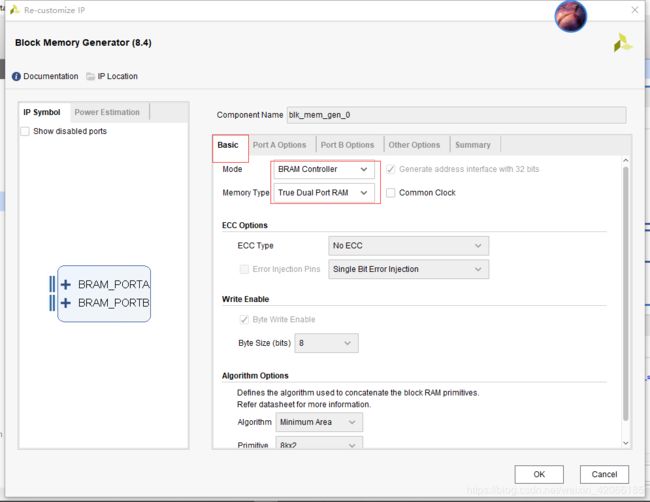
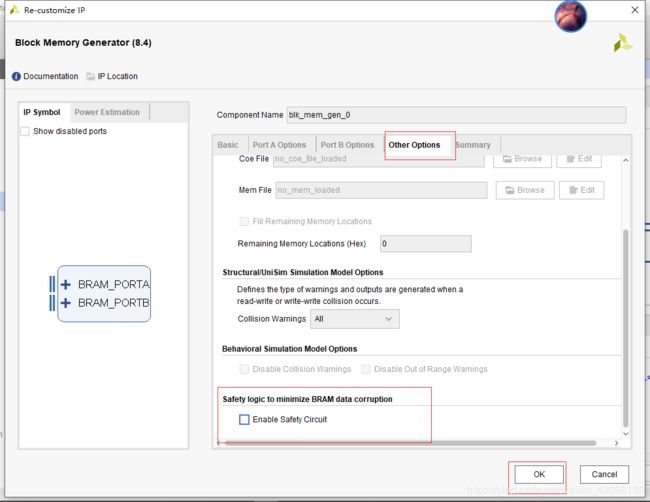
3、增加一个block memory generator 部分,修改basic 和 other options
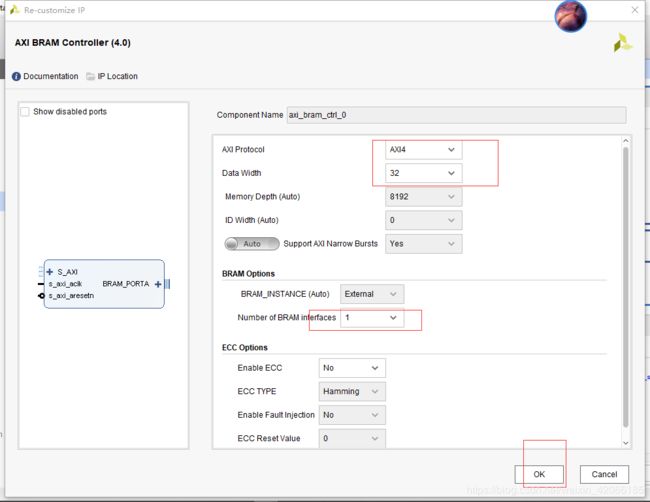
4、增加axi bram controller ,将bram的接口的个数修改成为1个
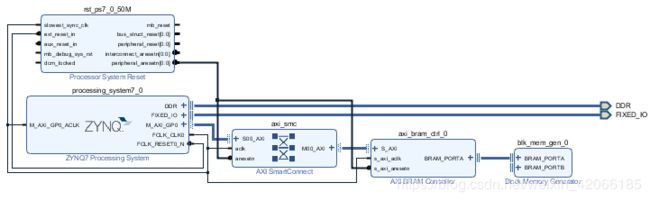
5、run block autometion。然后连接所有线,为了好看,自动排版。得到如下的架构图
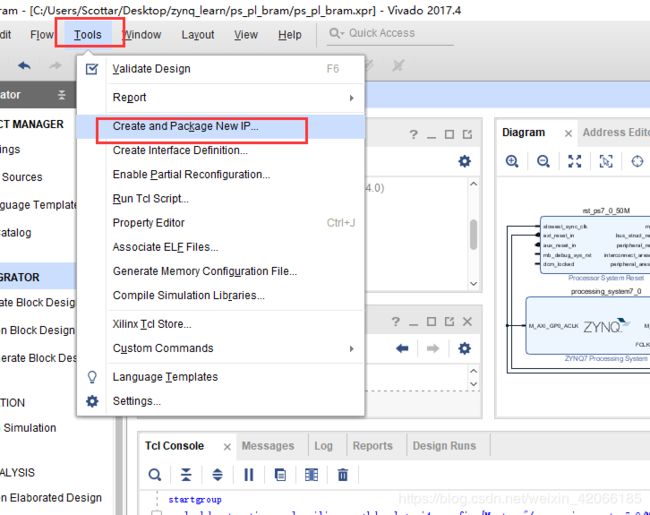
3.2 新建一个读bram的ip
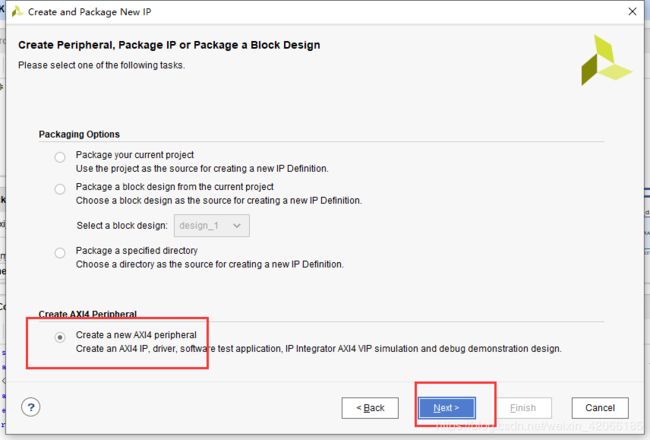
1、新建ip
2、选择类型为axi

2、对新建的ip进行编辑
ports 处增加:
// Users to add ports here
input [31:0] din,
output [31:0] dout,
output en,
output [3:0] we,
output rst,
output [31:0] addr,
output write_end,
在后面的实例化部分增加:
// Instantiation of Axi Bus Interface S00_AXI
pl_ram_ctrl_v2_0_S00_AXI # (
.C_S_AXI_DATA_WIDTH(C_S00_AXI_DATA_WIDTH),
.C_S_AXI_ADDR_WIDTH(C_S00_AXI_ADDR_WIDTH)
) pl_ram_ctrl_v2_0_S00_AXI_inst (
.din (rdata),
.dout (wdata),
.en (en),
.we (we),
.rst (rst),
.addr (addr),
.write_end (write_end),
最后在其内部的逻辑模块中加入:
// Add user logic here
ram_read_write ram_inst
(
.clk (S_AXI_ACLK),
.rst_n (S_AXI_ARESETN),
.din (din),
.dout (dout),
.en (en),
.we (we),
.rst (rst),
.addr (addr),
.start_clr (start_clr),
.start (slv_reg0[0]),
.init_data (slv_reg1),
.write_end (write_end),
.len (slv_reg2),
.start_addr (slv_reg3)
) ;
最以后新建一个逻辑功能文件
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// //
// Author: myj //
// ALINX(shanghai) Technology Co.,Ltd //
// WEB: http://www.alinx.cn/ //
// //
//////////////////////////////////////////////////////////////////////////////////
// //
// Copyright (c) 2019,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//////////////////////////////////////////////////////////////////////////////////
//================================================================================
// Description: pl read and write bram
//
//================================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------------
// 2018/7/27 myj 1.0 Original
// 2019/2/28 myj 2.0 Adding some comments
//********************************************************************************/
module ram_read_write
(
input clk,
input rst_n,
//bram port
input [31:0] din,
output reg [31:0] dout,
output reg en,
output reg [3:0] we,
output rst,
output reg [31:0] addr,
//control signal
input start, //start to read and write bram
input [31:0] init_data, //initial data defined by software
output reg start_clr, //clear start register
output reg write_end, //write bram completed
input [31:0] len, //data count
input [31:0] start_addr //start bram address
);
assign rst = 1'b0 ;
localparam IDLE = 3'd0 ;
localparam READ_RAM = 3'd1 ;
localparam READ_END = 3'd2 ;
localparam WRITE_RAM = 3'd3 ;
localparam WRITE_END = 3'd4 ;
reg [2:0] state ;
reg [31:0] len_tmp ;
reg [31:0] start_addr_tmp ;
always @(posedge clk or negedge rst_n)
begin
if (~rst_n)
begin
state <= IDLE ; // 状态控制信号
dout <= 32'd0 ; // ram 的数据输出信号
en <= 1'b0 ; // ram 是能信号
we <= 4'd0 ; // 读写控制信号
addr <= 32'd0 ; //adddr
write_end <= 1'b0 ; // 写结束标志
start_clr <= 1'b0 ; // 清除开始
len_tmp <= 32'd0 ; //临时长度
start_addr_tmp <= 32'd0 ; //默认状态为0
end
else
begin
case(state)
IDLE : begin // 如果是空闲状态,就把其切换到read ram 的情况下
if (start)
begin
state <= READ_RAM ;
addr <= start_addr ; // 将地址给的信息给第地址
start_addr_tmp <= start_addr ; // 将开始地址给 起始地址
len_tmp <= len ; // 长度
dout <= init_data ; // 将软件的最开始的初始数据,给dout
en <= 1'b1 ; // 使能
start_clr <= 1'b1 ; // 清除start 为1
end
write_end <= 1'b0 ; // 写完成的标志
end
READ_RAM : begin
if ((addr - start_addr_tmp) == len_tmp - 4) //read completed // 如果临时的长度-4 == addr -
begin
state <= READ_END ;
en <= 1'b0 ;
end
else
begin
addr <= addr + 32'd4 ; // address is byte based, for 32bit data width, adding 4
end
start_clr <= 1'b0 ; // 开始清除,不开始
end
READ_END : begin
addr <= start_addr_tmp ; // 读结束
en <= 1'b1 ; // 使能
we <= 4'hf ; // 读写使能控制。
state <= WRITE_RAM ; // 读结束结束之后,将状态切换到write_ram
end
WRITE_RAM : begin
if ((addr - start_addr_tmp) == len_tmp - 4) //write completed
begin
state <= WRITE_END ; // 写结束了,
dout <= 32'd0 ; // data out
en <= 1'b0 ; //使能为0
we <= 4'd0 ; // 读写控制
end
else
begin
addr <= addr + 32'd4 ; // 如果正在写,就把地址每次加4
dout <= dout + 32'd1 ; // 将输出的数值,增加1
end
end
WRITE_END : begin
addr <= 32'd0 ; // 将当前的地址变为0
write_end <= 1'b1 ; // 将 写完成的标志变成1
state <= IDLE ; //将状态切换成idle 状态
end
default : state <= IDLE ;
endcase
end
end
endmodule
以上也就是实际觉得ip的核模块
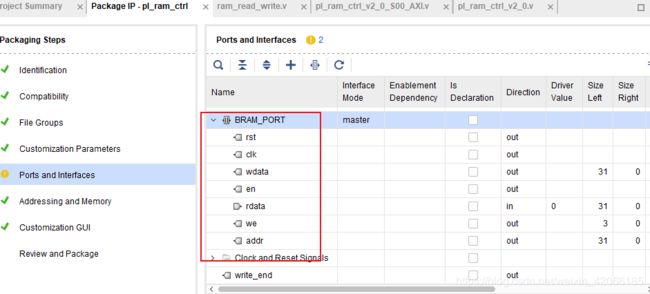
3、ip-xadc进行操作
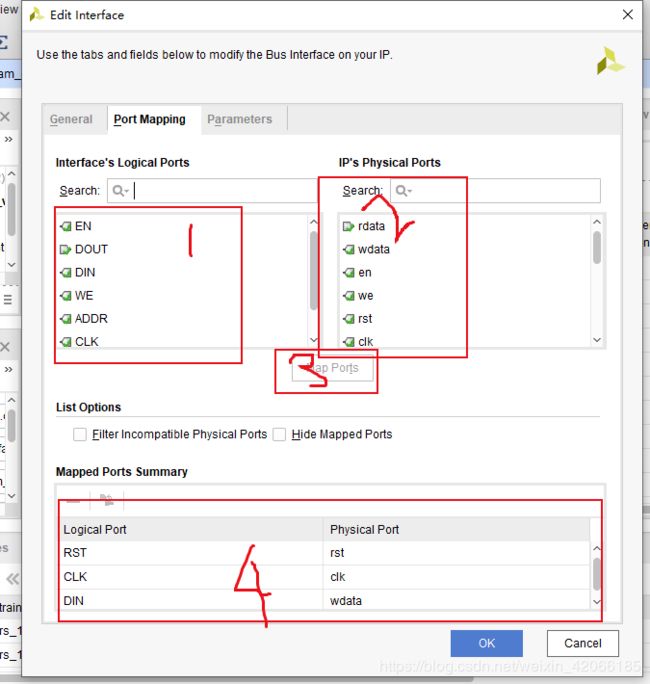
增加这个借口:
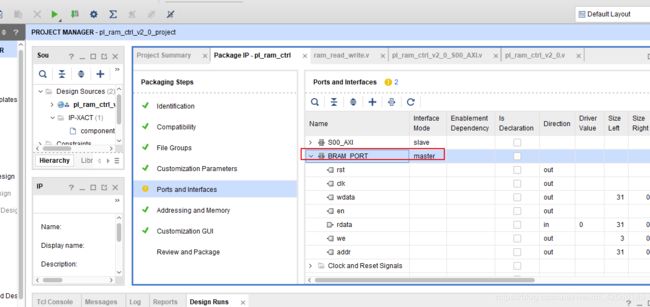
双击之后变成:
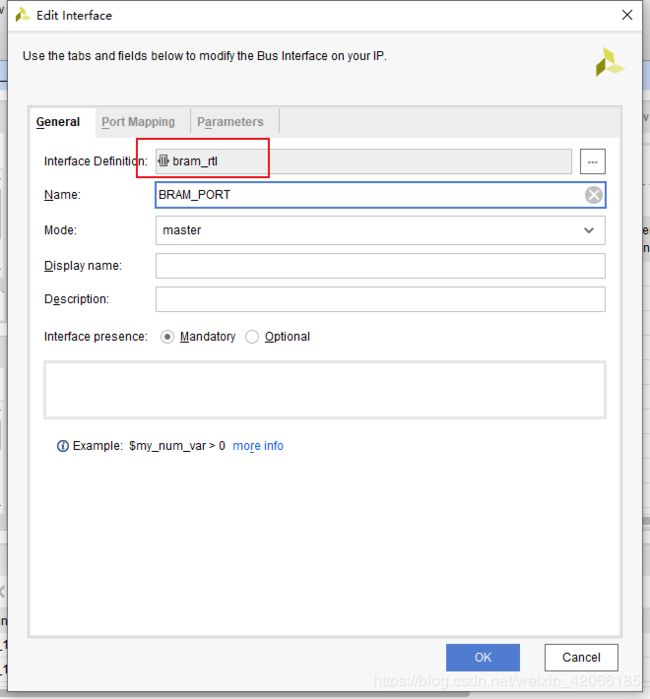
将 端口进行一定的对应
对parameter页进行控制:
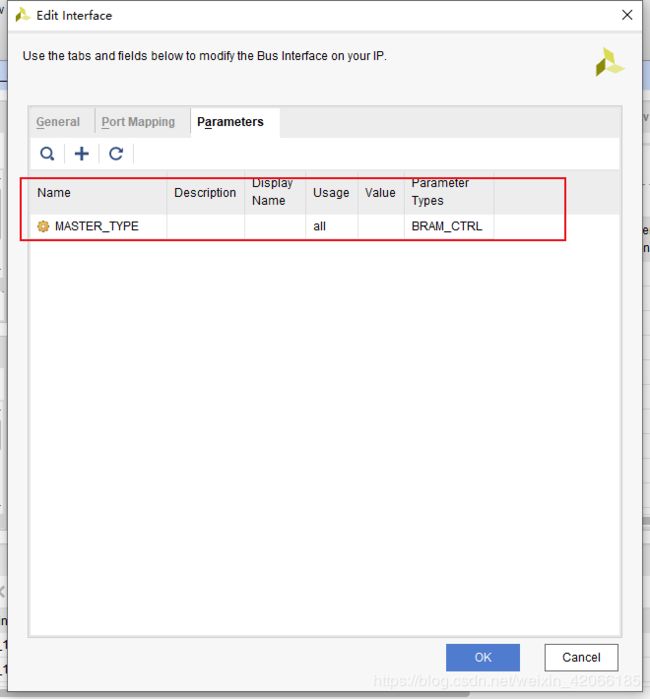
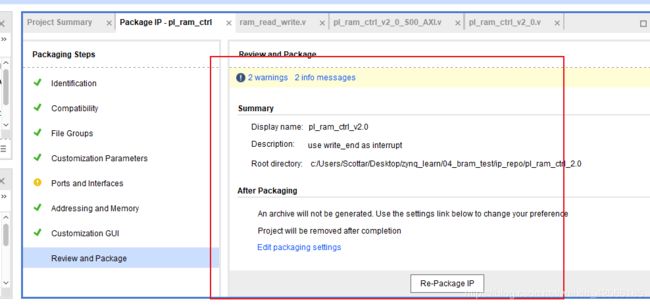
最后的结果:
4、最后对该ip进行打包