VINS-FUSION 源码 双目 单线程 按执行顺序阅读
VINS-FUSION 源码 双目 单线程 按执行顺序阅读
Keywords :
VINS-FUSION vins 源码解读 源码梳理 vins数据结构 vinsfusion vins双目
双目vins 双目vinsfusion 双目vins_fusion vins fusion结构梳理
vins_fusion结构梳理 vins源码 vinsfusion源码 vins纯双目 vinsfusion纯双目 vins-fusion广角双目 vins-fusion代码解读 vins-fusion代码梳理
- 概述
本文依照代码(双目不含imu,只开单线程)执行顺序写成,内容为主要代码加注释的方式,个别会有文字说明,VINS-FUSION开源代码地址为:
https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
错的地方欢迎指正
转载注明来源 - by.十里桃园
吐槽下小觅,只会在知乎抖机灵卖产品,真正的干货基本没,抖机灵抖得多了就很烦了。
再吐槽下vins。vslam的前端在光流法,以至于此算法的天花板颇低。
有两个先天弱点:1,特征点无描述,导致无法用某一帧定位在全图的位置 2,用LK光流跟踪,转弯废
-
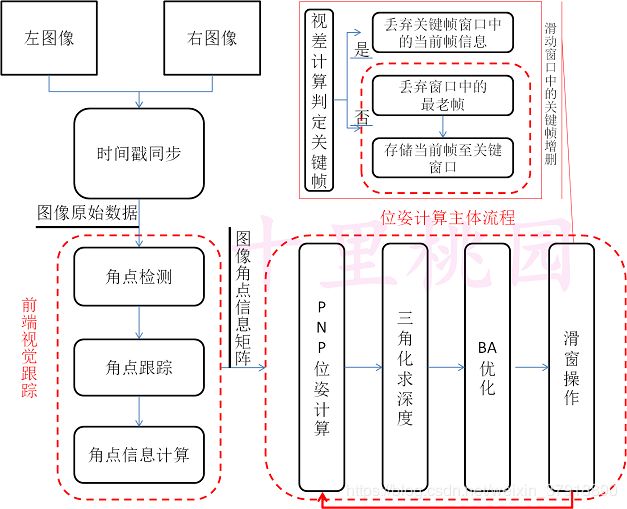
程序流程图(不含回环检测)
程序位姿计算主要分为两个模块,暂不包含回环检测模块:
1,前端视觉跟踪及角点信息计算
2,位姿计算模块
- 程序入口:
程序入口:VINS-Fusion/vins-estimator/src/rosNodeTest.cpp
- 3.1 estimator 类初始化
rosNodeTest.cpp:
Estimator estimator;
Estimator.cpp:
Estimator::Estimator(): f_manager{Rs}
{
ROS_INFO("init begins");
initThreadFlag = false; // 是否初始化线程 false则表示还未初始化线程数
clearState();//清除了状态,为诸多变量赋初值
}
- 3.2数据队列queue初始化
rosNodeTest.cpp:
queue
feature_buf;//存储feature
queue
img0_buf;//存储image0 左侧图像
queue
img1_buf;//存储image1 左侧图像
- 3.3 main函数
rosNodeTest.cpp:
readParameters(config_file);
estimator.setParameter();//读取并配置文件参数
ros::Subscriber
sub_feature = n.subscribe("/feature_tracker/feature", 2000, feature_callback);//源数据为特征点
ros::Subscriber
sub_img0 = n.subscribe(IMAGE0_TOPIC, 100, img0_callback);//左侧图像
ros::Subscriber
sub_img1 = n.subscribe(IMAGE1_TOPIC, 100, img1_callback);//右侧图像
ros::Subscriber sub_restart = n.subscribe("/vins_restart", 100,
restart_callback); //restart
void restart_callback(const std_msgs::BoolConstPtr &restart_msg)
{
if (restart_msg->data
== true)
{
ROS_WARN("restart the estimator!");
estimator.clearState();//清除状态 赋初始值
estimator.setParameter();//根据配置文件赋值
}
return;
}
std::thread sync_thread{sync_process};//入口
main函数为程序入口程序,值得注意的是sync_process为程序入口。
- 接受源图像数据及处理接口
接受源图像数据定义在synv_process函数中,并送入estimator进行位姿估计和后续运算。其接受图像代码块如下:
rosNodeTest.cpp:
double time0 =
img0_buf.front()->header.stamp.toSec();
double time1 =
img1_buf.front()->header.stamp.toSec();
// 0.003s sync tolerance 双摄像头同步 阈值0.003
if(time0 < time1 - 0.003)
{
img0_buf.pop();
printf("throw img0\n");
}
else if(time0 > time1 + 0.003)
{
img1_buf.pop();
printf("throw img1\n");
}//双摄像头同步 购买的摄像头已经做了同步 ros消息时间戳完全相同
else
{
time =
img0_buf.front()->header.stamp.toSec();
header =
img0_buf.front()->header;
image0 =
getImageFromMsg(img0_buf.front());//接收到的左图像 1通道
img0_buf.pop();
image1 =
getImageFromMsg(img1_buf.front());//接收到的右图像 1通道
img1_buf.pop();
//printf("find img0 and img1\n");
}
在接受到源图像之后,送入estimator:
rosNodeTest.cpp:
if(!image0.empty())
estimator.inputImage(time, image0,
image1);//双目图像送入estimator
- 角点检测和视觉跟踪
- 5.1 外层调用接口
VINS-FUISON调用的OPENCV的角点检测和光流法跟踪函数,其外层调用接口如下:
estimator.cpp:
Estimator::inputImage()
map>>> featureFrame;//map 里面的pair为 >类型 存储featureFrame map
if(_img1.empty())
featureFrame =
featureTracker.trackImage(t, _img);//角点检测和跟踪 单目
else
featureFrame = featureTracker.trackImage(t, _img, _img1);//角点检测和跟踪 双目
if (SHOW_TRACK)//是否发布TrackImage话题 RVIZ里面的 track_image窗口
{
cv::Mat imgTrack =
featureTracker.getTrackImage();
//featureTracker.showUndistortion();//显示去畸变的图像,dataset可以正常显示 ,摄像头有黑白间隔异常
pubTrackImage(imgTrack, t);
}
- 5.2 角点检测
VINS-FUSION采用的为Shi-Tomasi角点。
feature_tracker.cpp:
FeatureTracker::setMask ()
cv::circle(mask, it.second.first, MIN_DIST,
0, -1);//把特征点周围MIN_DIST的点设置为0
feature_tracker.cpp:
FeatureTracker::trackImage()
cv::goodFeaturesToTrack(cur_img,
n_pts, MAX_CNT - cur_pts.size(), 0.01, MIN_DIST, mask);
//cur_img
当前输入的单通道图像;
//n_pts 输出的被提取的角点坐标;
//MAX_CNT为设置的最大角点个数程序中会按照角点强度降序排序,超过MAX_CNT的角点将被舍弃;
//0.01为角点强度的阈值系数,若检测出所有角点中的最大强度是max,那么强度值小于max*qualityLevel的角点被舍弃
//MIN_DIST为角点与其邻域强角点之间的欧式距离,与邻域强角点距离小于minDistance的角点将被舍弃;
//mask : 感兴趣区域,
- 5.3 光流法跟踪
VINS-FUSION采用基于角点特征的金字塔LK光流跟踪算法。VINS所定义的跟踪包含两种模式:前后帧跟踪、左右帧间跟踪
前后帧跟踪,以前帧为基础,跟踪当前帧:
feature_tracker.cpp:
FeatureTracker::trackImage()
cv::calcOpticalFlowPyrLK(prev_img,
cur_img, prev_pts, cur_pts, status, err, cv::Size(21, 21), 3);
//输入:prev_img 第一张图像
cur_img: 当前图像
prev_pts第一张图像中的点
//输出
nextPts 当前图像的点
//金字塔三层
if(FLOW_BACK)// 反向的光流跟踪,通过上一帧跟踪到的点,反向跟踪回去,差异大的点剔除。 默认打开->bot.yaml
{
vector reverse_status;
vector
reverse_pts = prev_pts;
cv::calcOpticalFlowPyrLK(cur_img,
prev_img, cur_pts, reverse_pts, reverse_status, err, cv::Size(21, 21), 1,
cv::TermCriteria(cv::TermCriteria::COUNT+cv::TermCriteria::EPS,
30, 0.01), cv::OPTFLOW_USE_INITIAL_FLOW);
//反向跟踪
//cv::calcOpticalFlowPyrLK(cur_img, prev_img,
cur_pts, reverse_pts, reverse_status, err, cv::Size(21, 21), 3);
for(size_t i = 0; i
< status.size(); i++)
{
if(status[i] && reverse_status[i] && distance(prev_pts[i],
reverse_pts[i]) <= 0.5)
//正向和反向的跟踪状态均为1 且反向跟踪的点跟当前点小于0.5个像素
{
status[i] = 1;
//重置跟踪状态
}
else
status[i] = 0;
//重置跟踪状态
}
}
左右帧跟踪,以当前左帧为基础,跟踪当前右帧:
feature_tracker.cpp:
FeatureTracker::trackImage()
cv::calcOpticalFlowPyrLK(cur_img,
rightImg, cur_pts, cur_right_pts, status, err, cv::Size(21, 21), 3); //以左帧为基准跟踪右帧,3层金字塔
if(FLOW_BACK) //反向check跟踪
{
cv::calcOpticalFlowPyrLK(rightImg, cur_img,
cur_right_pts, reverseLeftPts, statusRightLeft, err, cv::Size(21, 21), 3);
for(size_t i = 0; i < status.size(); i++)
{
if(status[i] && statusRightLeft[i]
&& inBorder(cur_right_pts[i]) && distance(cur_pts[i],
reverseLeftPts[i]) <= 0.5)
//正向和反向的跟踪状态均为1 没有越界 且反向跟踪的点跟当前点小于0.5个像素
status[i] = 1;
else
status[i] = 0;
}
}
- 5.4角点坐标畸变纠正
VINS-FUSION采用对角点进行畸变纠正的方式来消除相机畸变的影响。
角点跟踪结束后,对跟踪角点结果进行畸变纠正。入口为:
feature_tracker.cpp:
FeatureTracker::trackImage()
cur_un_pts
= undistortedPts(cur_pts, m_camera[0]);
//cur_un_pts 当前左侧图像角点纠正后的坐标,vector类型;cur_pts待纠正的坐标每副图像的坐标存在一个vector里; m_camera[0]相机编号,0->left,1->right
cur_un_right_pts
= undistortedPts(cur_right_pts, m_camera[1]);
//cur_un_right_pts 当前右侧图像角点纠正后的坐标,vector类型;cur_pts待纠正的坐标每副图像的坐标存在一个vector里; m_camera[1]相机编号,0->left,1->right
feature_tracker.cpp:
FeatureTracker:: undistortedPts ()
vector
un_pts;//纠正结果
for (unsigned int i = 0; i <
pts.size(); i++)//遍历当前图像的角点
{
Eigen::Vector2d a(pts[i].x,
pts[i].y);
Eigen::Vector3d b;
cam->liftProjective(a, b); // 调用图像像素投影函数 将图像特征点的坐标映射到空间坐标
un_pts.push_back(cv::Point2f(b.x() /
b.z(), b.y() / b.z()));
//投影点3D -> 非畸变2D
b(x,y,z)为P点在相机归一化平面的投影 /z为转二维齐次坐标
}
VINS_FUSION采用循环消畸变的方式,先将像素在图像中的坐标转换至归一化平面再进行后续操作。
CataCamera.cc:
CataCamera::liftProjective ()
mx_d =
m_inv_K11 * p(0) + m_inv_K13;// K11 - > fx K13->cx p为像素在RAW图像中的坐标点
my_d =
m_inv_K22 * p(1) + m_inv_K23;//K2 ->fy K23->cy
//投影到归一化平面
int n = 8;//循环消除畸变步数
Eigen::Vector2d
d_u;
distortion(Eigen::Vector2d(mx_d,
my_d), d_u);//分布消除畸变
//
Approximate value 近似值
mx_u =
mx_d - d_u(0);
my_u =
my_d - d_u(1);
for (int i = 1; i < n; ++i)//递归循环
{
distortion(Eigen::Vector2d(mx_u,
my_u), d_u);
mx_u = mx_d - d_u(0);//每递归一次的差值
my_u = my_d - d_u(1);
}
CataCamera.cc:
CataCamera::distortion ()
CataCamera::distortion(const Eigen::Vector2d& p_u,
Eigen::Vector2d& d_u) const //分布畸变纠正函数
{
double k1 =
mParameters.k1();//径向畸变k1
double k2 =
mParameters.k2();//径向畸变k2
double p1 = mParameters.p1();//径向畸变p1
double p2 =
mParameters.p2();//径向畸变p2
double mx2_u, my2_u,
mxy_u, rho2_u, rad_dist_u;
mx2_u = p_u(0) * p_u(0);
my2_u = p_u(1) * p_u(1);
mxy_u = p_u(0) * p_u(1);
rho2_u = mx2_u + my2_u;//距原点距离的平方
rad_dist_u = k1 * rho2_u + k2 * rho2_u *
rho2_u;//径向畸变因子
d_u << p_u(0) * rad_dist_u + 2.0 * p1 * mxy_u + p2 *
(rho2_u + 2.0 * mx2_u),//切向畸变纠正
p_u(1) * rad_dist_u
+ 2.0 * p2 * mxy_u + p1 * (rho2_u + 2.0 * my2_u);//切向畸变纠正
}
- 5.5跟踪角点的速度计算
feature_tracker.cpp:
FeatureTracker::trackImage()
pts_velocity
= ptsVelocity(ids, cur_un_pts, cur_un_pts_map, prev_un_pts_map);
//计算当前点的运动速度 左侧相机
right_pts_velocity
= ptsVelocity(ids_right, cur_un_right_pts, cur_un_right_pts_map,
prev_un_right_pts_map);
//计算当前点的运动速度 右侧相机
feature_tracker.cpp:
FeatureTracker::ptsVelocity()
cur_id_pts.clear();
for (unsigned int i = 0; i <
ids.size(); i++)
{
cur_id_pts.insert(make_pair(ids[i],
pts[i]));//制作 ids和pts的对应映射map
}
double dt = cur_time - prev_time;
//
v=s/dt
//dt已求出
std::map::iterator it;
it =
prev_id_pts.find(ids[i]);
if (it != prev_id_pts.end())//遍历所有角点
{
double v_x = (pts[i].x - it->second.x) / dt;//Vdx
double v_y = (pts[i].y - it->second.y) / dt;//Vdy
pts_velocity.push_back(cv::Point2f(v_x,
v_y));//记录每个角点的速度 return给调用
}
- 5.6角点帧的数据结构
feature_tracker.cpp:
FeatureTracker::trackImage()
map>>> featureFrame;//角点数据帧
for (size_t i = 0; i < ids.size(); i++)//遍历所有角点
{
int feature_id = ids[i];//当前角点 ID
double x, y ,z;
x = cur_un_pts[i].x;//畸变纠正后的当前点x坐标
y = cur_un_pts[i].y;//畸变纠正后的当前点y坐标
z = 1;//齐次坐标
double p_u, p_v;
p_u = cur_pts[i].x;//像素平面当前x坐标
p_v = cur_pts[i].y;//像素平面当前y坐标
int camera_id = 0;
double velocity_x, velocity_y;
velocity_x = pts_velocity[i].x; //当前方向x方向速度
velocity_y = pts_velocity[i].y; //当前方向y方向速度
Eigen::Matrix xyz_uv_velocity;
xyz_uv_velocity << x, y, z,
p_u, p_v, velocity_x, velocity_y;//
//角点帧数据格式:三维齐次坐标*3;二维像素平面坐标*2;x,y方向速度*2;共7个基本数据
featureFrame[feature_id].emplace_back(camera_id, xyz_uv_velocity);//压入当前Vector,函数结尾返回
}
- 位姿计算
在跟踪和角点信息等信息计算完毕后,将依赖所得数据进行SLAM计算。
- [ ]6.1图像处理函数调用
estimator.cpp:
Estimator::inputImage()
else //默认走这里 非多线程
{
mBuf.lock();
featureBuf.push(make_pair(t, featureFrame));//当前feature 送入FeatureBuf
mBuf.unlock();
TicToc processTime;
processMeasurements();//执行运算
printf("process time: %f\n", processTime.toc());//
}
estimator.cpp:
Estimator:: processMeasurements ()
pair >
> > > feature;//读取队列中的feature的容器
feature
= featureBuf.front();//队列中的角点信息读入feature变量
processImage(feature.second, feature.first);//根据接受到的特征执行计算
- 6.2关键帧判定
VINS_FUSION维护了默认大小为10帧的滑动窗口,滑窗中记录了10帧关键帧的双目图像信息。当接受到新图像时,计算平均视差,若太小则不把当前图形作为关键帧加入滑窗。
estimator.cpp:
Estimator:: processImage ()
if
(f_manager.addFeatureCheckParallax(frame_count, image, td))
//frame_count:滑动窗口里的帧数 image:要处理的当前帧 td:图像和IMU的时间差 无IMU置为0
{
marginalization_flag = MARGIN_OLD;//作为关键帧
}
else
{
marginalization_flag = MARGIN_SECOND_NEW;//不作为关键帧
}
//通过计算两帧之间的视差决定是否作为关键帧,添加之前检测到的角点到feature容器中,计算每一个角点被跟踪次数,以及视差
//未完成初始化则先填满关键帧,默认10帧
feature_manager.cpp:
FeatureManager::addFeatureCheckParallax
FeaturePerFrame f_per_fra(id_pts.second[0].second,
td);
//f_per_fra初始化,左侧角点信息赋值
//id_pts.second[0].second 左侧相机的角点信息
//类型为 Eigen::Matrix 三维齐次坐标*3;二维像素平面坐标*2;x,y方向速度*2;
assert(id_pts.second[0].first == 0);
//如果左侧相机角点为0 抛出
if(id_pts.second.size() == 2)
//如果右侧相机角点信息存在
{
f_per_fra.rightObservation(id_pts.second[1].second);
//右侧角点信息赋值至f_per_fra
assert(id_pts.second[1].first == 1);
//右侧角点信息不存在 抛出
}
int feature_id = id_pts.first;//角点ID赋值 id_pts.first为一张图像中的所有角点的序号从强到不强
auto it = find_if(feature.begin(), feature.end(), [feature_id](const FeaturePerId &it)
{
return it.feature_id ==
feature_id;
});
//it 为与当前角点id相同的id 类型为 FeaturePerId
if (it == feature.end())
//如果当前角点list中不存在跟当前角点相同的id 即角点第一次才出现 那么新增
{
feature.push_back(FeaturePerId(feature_id, frame_count));//feature中新建一个FeaturePerId对象
feature.back().feature_per_frame.push_back(f_per_fra);//记录被几帧跟踪到
new_feature_num++;//当前帧的角点数
}
else if (it->feature_id == feature_id)//找到当前角点
{
it->feature_per_frame.push_back(f_per_fra);//记录被几帧跟踪到
last_track_num++;//跟踪到的角点数目
if( it-> feature_per_frame.size() >= 4)//连续被4帧跟踪到
long_track_num++;
}
}
if (frame_count < 2 || last_track_num < 20 ||
long_track_num < 40 || new_feature_num > 0.5 * last_track_num)
//关键帧数小于2 跟踪到角点数目小于20 连续被跟踪小于40帧 当前帧加入角点记录列表的数目大于跟踪到角点数目的一半(当前帧出现新的视野较多)
//以上4条件满足一则插入滑动窗口关键帧
return true;
- 6.3帧间视差计算(VINS有bug改正)
VINS_FUSION在计算视差的时候利用角点缓存等数据计算次新帧,次次新帧之间的误差,从而判定是否将当前帧加入关键帧。
feature_manager.cpp:
FeatureManager::addFeatureCheckParallax ()
for (auto &it_per_id : feature)//遍历特征点
{
// 计算第2最新帧和第3最新帧之间跟踪到的特征点的平均视差
if (it_per_id.start_frame <= frame_count - 2
&&
it_per_id.start_frame + int(it_per_id.feature_per_frame.size()) - 1
>= frame_count - 1)
//跟刚加入的时候对比 两帧以内
//刚加入的那帧 与 连续跟踪数之和再减1
{
// 对于给定id的特征点,计算第2最新帧和第3最新帧之间该特征点的视差(当前帧frame_count是第1最新帧)
parallax_sum +=
compensatedParallax2(it_per_id, frame_count);
parallax_num++;
}
}
if (parallax_num
== 0)
{
return true;
//插入关键帧
}
else
{
ROS_DEBUG("parallax_sum: %lf, parallax_num:
%d", parallax_sum,
parallax_num);
ROS_DEBUG("current parallax: %lf", parallax_sum / parallax_num *
FOCAL_LENGTH);
last_average_parallax = parallax_sum /
parallax_num * FOCAL_LENGTH;
return parallax_sum / parallax_num >=
MIN_PARALLAX;
//补偿后的视差大于 阈值 若小于,当前帧不插入关键帧
// MIN_PARALLAX = MIN_PARALLAX(默认15) / FOCAL_LENGTH;
}
VINS—FUSION做帧间视差补偿计算将调用下述函数
feature_manager.cpp:
FeatureManager::compensatedParallax2 ()
double FeatureManager::compensatedParallax2(const FeaturePerId &it_per_id, int frame_count)
{
//it_per_id : 传入的角点id 类型为FeaturePerId
//frame_count :当前滑窗内的图像帧数
//check the second last frame is keyframe or not
//parallax betwwen seconde last frame and third last frame
const FeaturePerFrame &frame_i = it_per_id.feature_per_frame[frame_count - 2 - it_per_id.start_frame];
const FeaturePerFrame &frame_j = it_per_id.feature_per_frame[frame_count - 1 - it_per_id.start_frame];
double ans = 0;//视差补偿值
Vector3d p_j = frame_j.point;
double u_j = p_j(0);
double v_j = p_j(1);
Vector3d p_i = frame_i.point;
Vector3d p_i_comp;//冗余代码
//int r_i = frame_count - 2;
//int r_j = frame_count - 1;
//p_i_comp = ric[camera_id_j].transpose() * Rs[r_j].transpose() * Rs[r_i]
* ric[camera_id_i] * p_i;
p_i_comp = p_i;//冗余代码
double dep_i = p_i(2);
double u_i = p_i(0) /
dep_i;//像素平面坐标
double v_i = p_i(1) /
dep_i;//像素平面坐标
double du = u_i - u_j,
dv = v_i - v_j;//x差值与y差值 此处应有误,u_j应为 u_j / p_j(2) ??
double dep_i_comp =
p_i_comp(2);//冗余代码
double u_i_comp =
p_i_comp(0) / dep_i_comp;//冗余代码
double v_i_comp =
p_i_comp(1) / dep_i_comp;//冗余代码
double du_comp =
u_i_comp - u_j, dv_comp = v_i_comp - v_j;//冗余代码
ans = max(ans, sqrt(min(du * du + dv * dv,
du_comp * du_comp + dv_comp * dv_comp)));
//上行代码有误
return ans;
}
但该函数有谬误,其修正方式应如下
feature_manager.cpp:
FeatureManager::compensatedParallax2 ()
double FeatureManager::compensatedParallax2(const FeaturePerId &it_per_id, int frame_count)
{
//it_per_id : 传入的角点id 类型为FeaturePerId
//frame_count :当前滑窗内的图像帧数
//check the second last frame is keyframe or not
//parallax betwwen seconde last frame and third last frame
const FeaturePerFrame &frame_i = it_per_id.feature_per_frame[frame_count - 2 - it_per_id.start_frame];
const FeaturePerFrame &frame_j = it_per_id.feature_per_frame[frame_count - 1 - it_per_id.start_frame];
double ans = 0;//视差补偿值
Vector3d p_j = frame_j.point;
double u_j = p_j(0);
double v_j = p_j(1);
Vector3d p_i = frame_i.point;
//Vector3d p_i_comp;//冗余代码
//int r_i = frame_count - 2;
//int r_j = frame_count - 1;
//p_i_comp = ric[camera_id_j].transpose() * Rs[r_j].transpose() * Rs[r_i]
* ric[camera_id_i] * p_i;
// p_i_comp = p_i;//冗余代码
double dep_i = p_i(2);
double u_i = p_i(0) /
dep_i;//像素平面坐标
double v_i = p_i(1) /
dep_i;//像素平面坐标
double dep_j = p_j(2);
double u_j = p_j(0) / dep_j;//像素平面坐标
double v_j = p_j(1) / dep_j;//像素平面坐标
double du = u_i - u_j,
dv = v_i - v_j;//x差值与y差值 此处应有误,u_j应为 u_j / p_j(2) ??
// double dep_i_comp = p_i_comp(2);//冗余代码
// double u_i_comp = p_i_comp(0) / dep_i_comp;//冗余代码
// double v_i_comp = p_i_comp(1) / dep_i_comp;//冗余代码
// double du_comp = u_i_comp - u_j, dv_comp = v_i_comp - v_j;//冗余代码
//ans = max(ans, sqrt(min(du * du + dv * dv, du_comp * du_comp + dv_comp *
dv_comp)));
//上行代码有误
ans = sqrt(du * du + dv * dv);
return ans;
}
- 6.3位姿计算
VINS—FUSION使用PNP方法计算相机位姿,其主体函数如下,主要有4个部分:PNP,三角化,BA优化,滑窗
estimator.cpp:
Estimator:: processImage ()
if(STEREO && !USE_IMU)
{
f_manager.initFramePoseByPnP(frame_count,
Ps, Rs, tic, ric);
//tic[0]左相机T tic[1] 右相机T ric[0]左相机R ric[1]右相机R
f_manager.triangulate(frame_count,
Ps, Rs, tic, ric);//三角化三维坐标
optimization();//非线性最小二乘优化重投影误差
if(frame_count == WINDOW_SIZE)
{
solver_flag = NON_LINEAR; //初始化完毕,程序正常运行
slideWindow();
ROS_INFO("Initialization finish!");
}
}
TicToc t_solve;
if(!USE_IMU)
f_manager.initFramePoseByPnP(frame_count, Ps, Rs, tic, ric);//pnp求位姿
f_manager.triangulate(frame_count, Ps, Rs, tic, ric);//三角化
optimization();//优化
set removeIndex;
outliersRejection(removeIndex);
f_manager.removeOutlier(removeIndex);
if (! MULTIPLE_THREAD)
{
featureTracker.removeOutliers(removeIndex);
predictPtsInNextFrame();
}
ROS_DEBUG("solver costs: %fms", t_solve.toc());
//异常检测与恢复, 检测到异常,系统将切换回初始化阶段
if (failureDetection())
{
ROS_WARN("failure detection!");
failure_occur = 1;
clearState();
setParameter();
ROS_WARN("system reboot!");
return;
}
slideWindow();//滑窗
f_manager.removeFailures();
// prepare output of VINS
key_poses.clear();
for (int i = 0; i <= WINDOW_SIZE; i++)
key_poses.push_back(Ps[i]);
last_R = Rs[WINDOW_SIZE];
last_P = Ps[WINDOW_SIZE];
last_R0 = Rs[0];
last_P0 = Ps[0];
updateLatestStates();
- 6.3.1 PNP求位姿
PNP计算函数提供了opencv cv::solvePnP函数的外层封装和数据准备,在初始化第1帧图像时,因深度信息匮乏先执行三角化求深度。
feature_manager.cpp:
FeatureManager::solvePoseByPnP ()
bool FeatureManager::solvePoseByPnP(Eigen::Matrix3d &R, Eigen::Vector3d &P,
vector &pts2D, vector &pts3D)
{
Eigen::Matrix3d R_initial;
Eigen::Vector3d P_initial;
// w_T_cam ---> cam_T_w
R_initial = R.inverse();//相机到世界 R
P_initial = -(R_initial * P);//相机到世界 T
//printf("pnp size %d \n",(int)pts2D.size() );
if (int(pts2D.size()) < 4)//最小二乘法至少4个角点
{
printf("feature tracking not enough, please
slowly move you device! \n");
return false;
}
cv::Mat r, rvec, t, D, tmp_r;
cv::eigen2cv(R_initial, tmp_r);
cv::Rodrigues(tmp_r, rvec);//罗德里格斯变换 向量变换到矩阵
cv::eigen2cv(P_initial, t);//eigen 转自cv格式
cv::Mat K = (cv::Mat_(3, 3) << 1, 0, 0, 0, 1, 0, 0, 0,
1); //相机内参
bool pnp_succ;
pnp_succ = cv::solvePnP(pts3D, pts2D, K, D, rvec, t,
1);
//pts3D: 世界坐标系下的控制点的坐标
//pts2D: 在图像坐标系下对应的控制点的坐标
//K 相机内参矩阵
//D 畸变矩阵
//rvec 输出的旋转向量。使坐标点从世界坐标系旋转到相机坐标系
//t 输出的平移向量。使坐标点从世界坐标系平移到相机坐标系
//默认使用CV_ITERATIV迭代法
//pnp_succ = solvePnPRansac(pts3D, pts2D, K, D, rvec, t, true, 100, 8.0 /
focalLength, 0.99, inliers);
if(!pnp_succ)
{
printf("pnp failed ! \n");
return false;
}
cv::Rodrigues(rvec, r);//罗德里格斯变换
//cout << "r " << endl << r << endl;
Eigen::MatrixXd R_pnp;
cv::cv2eigen(r, R_pnp);//cv 格式转至 eigen格式 R矩阵
Eigen::MatrixXd T_pnp;
cv::cv2eigen(t, T_pnp);//cv 格式转至 eigen格式 T矩阵
// cam_T_w ---> w_T_cam
R =
R_pnp.transpose();
P = R * (-T_pnp);
return true;
}
- 6.3.2 三角化求深度
在三角化函数中,因本文档跟踪纯双目数据,并不含IMU数据,但下面函数中的IMU信息是仅因需要通过IMU坐标系转换,需要转换到左相机坐标系下的深度。
feature_manager.cpp:
FeatureManager::triangulate ()
int imu_i = it_per_id.start_frame;//IMU不用 但是坐标定义在imu上 通过imu转换位姿
Eigen::Matrix leftPose;
Eigen::Vector3d
t0 = Ps[imu_i] + Rs[imu_i] * tic[0];//利用imu的位姿计算左相机位姿 T
Eigen::Matrix3d
R0 = Rs[imu_i] * ric[0];//利用imu的位姿计算左相机位姿 R
leftPose.leftCols<3>()
= R0.transpose();
leftPose.rightCols<1>()
= -R0.transpose() * t0;
//cout
<< "left pose " << leftPose << endl;
Eigen::Matrix rightPose;
Eigen::Vector3d
t1 = Ps[imu_i] + Rs[imu_i] * tic[1];//利用imu的位姿计算右相机位姿
Eigen::Matrix3d
R1 = Rs[imu_i] * ric[1];//利用imu的位姿计算右相机位姿
rightPose.leftCols<3>()
= R1.transpose();
rightPose.rightCols<1>()
= -R1.transpose() * t1;
//cout << "right pose "
<< rightPose << endl;
Eigen::Vector2d
point0, point1;
Eigen::Vector3d
point3d;
point0 =
it_per_id.feature_per_frame[0].point.head(2);
point1 =
it_per_id.feature_per_frame[0].pointRight.head(2);
//cout
<< "point0 " << point0.transpose() << endl;
//cout
<< "point1 " << point1.transpose() << endl;
triangulatePoint(leftPose,
rightPose, point0, point1, point3d); // svd方法三角化
Eigen::Vector3d
localPoint;
localPoint
= leftPose.leftCols<3>() * point3d + leftPose.rightCols<1>();//左相机坐标系下的坐标
double depth = localPoint.z();//深度信息
if (depth > 0)
it_per_id.estimated_depth = depth;
else
it_per_id.estimated_depth = INIT_DEPTH;//INIT_DEPTH = 5.0
- 6.3.3 BA优化
- 6.3.4 滑窗操作
滑窗操作主要有两种操作
其一,次新帧为关键帧,删除最老帧插入次新帧
其二,次新帧不是关键帧,删除次新帧信息,如角点信息,跟踪信息等
其核心代码如下:
feature_manager.cpp:
FeatureManager::slideWindow ()
void Estimator::slideWindow()
{
TicToc t_margin;
if
(marginalization_flag == MARGIN_OLD)//关键帧更新
{
double t_0 = Headers[0];
back_R0 = Rs[0];
back_P0 = Ps[0];
if (frame_count == WINDOW_SIZE)//frame_count在初始化后恒等于WINDOW_SIZE的默认值10
{
for (int i = 0; i <
WINDOW_SIZE; i++)
{
Headers[i] = Headers[i + 1];//时间戳
Rs[i].swap(Rs[i + 1]);//变换矩阵
Ps[i].swap(Ps[i + 1]);
if(USE_IMU)
{
std::swap(pre_integrations[i], pre_integrations[i + 1]);
dt_buf[i].swap(dt_buf[i +
1]);
linear_acceleration_buf[i].swap(linear_acceleration_buf[i + 1]);
angular_velocity_buf[i].swap(angular_velocity_buf[i
+ 1]);
Vs[i].swap(Vs[i + 1]);
Bas[i].swap(Bas[i + 1]);
Bgs[i].swap(Bgs[i + 1]);
}
}
Headers[WINDOW_SIZE] =
Headers[WINDOW_SIZE - 1];//删除 一帧
Ps[WINDOW_SIZE] = Ps[WINDOW_SIZE
- 1];
Rs[WINDOW_SIZE] = Rs[WINDOW_SIZE
- 1];
if(USE_IMU)
{
Vs[WINDOW_SIZE] =
Vs[WINDOW_SIZE - 1];
Bas[WINDOW_SIZE] =
Bas[WINDOW_SIZE - 1];
Bgs[WINDOW_SIZE] =
Bgs[WINDOW_SIZE - 1];
delete pre_integrations[WINDOW_SIZE];
pre_integrations[WINDOW_SIZE]
= new IntegrationBase{acc_0, gyr_0, Bas[WINDOW_SIZE],
Bgs[WINDOW_SIZE]};
dt_buf[WINDOW_SIZE].clear();
linear_acceleration_buf[WINDOW_SIZE].clear();
angular_velocity_buf[WINDOW_SIZE].clear();
}
//释放ImageFrame中最老帧信息
if (true ||
solver_flag == INITIAL)
{
map::iterator it_0;
it_0 = all_image_frame.find(t_0);
delete it_0->second.pre_integration;
all_image_frame.erase(all_image_frame.begin(), it_0);
}
slideWindowOld();//删除最老帧更新窗口
}
}
else//关键帧不更新
{
if (frame_count == WINDOW_SIZE)
{
Headers[frame_count - 1] =
Headers[frame_count];
Ps[frame_count - 1] =
Ps[frame_count];
Rs[frame_count - 1] = Rs[frame_count];
if(USE_IMU)
{
for (unsigned int i = 0; i < dt_buf[frame_count].size();
i++)
{
double tmp_dt = dt_buf[frame_count][i];
Vector3d tmp_linear_acceleration =
linear_acceleration_buf[frame_count][i];
Vector3d
tmp_angular_velocity = angular_velocity_buf[frame_count][i];
pre_integrations[frame_count - 1]->push_back(tmp_dt, tmp_linear_acceleration,
tmp_angular_velocity);
dt_buf[frame_count -
1].push_back(tmp_dt);
linear_acceleration_buf[frame_count -
1].push_back(tmp_linear_acceleration);
angular_velocity_buf[frame_count - 1].push_back(tmp_angular_velocity);
}
Vs[frame_count - 1] =
Vs[frame_count];
Bas[frame_count - 1] =
Bas[frame_count];
Bgs[frame_count - 1] =
Bgs[frame_count];
delete pre_integrations[WINDOW_SIZE];
pre_integrations[WINDOW_SIZE]
= new IntegrationBase{acc_0, gyr_0, Bas[WINDOW_SIZE],
Bgs[WINDOW_SIZE]};
dt_buf[WINDOW_SIZE].clear();
linear_acceleration_buf[WINDOW_SIZE].clear();
angular_velocity_buf[WINDOW_SIZE].clear();
}
slideWindowNew();//删除次新帧信息
}
}
}