体感摄像头 realsense 系列硬件资料
一、体感摄像头
Intel的体感摄像机是具有深度图像采集能力的摄像机,目前已经出到了400系列。与kinect 2,ZED,leap motion比较,属于比较中庸。
手势识别方面不如leap motion,leap motion的视角是120度,精度和速度都比intel高,缺点是leap motion不给深度图,只给最后的骨骼跟踪结果,也就是只能做手势识别应用,不能干别的。
kinect 2采用了TOF稳定性相对较好、细节更多;被其他环境光源(红外线)影响的概率也更低。与散斑技术相比、画面很干净。视角变为70×60度。kinect 2后端的分析模块也比较给力,如可以侦测6 位使用者(含骨架)、25 个关节点(关节点与上一代相比多5个,现在在手掌这部分现在有三个关节点,所以可以在一定程度上侦测手的开合状态);可以根据脸部彩色影像的细微变化侦测心跳。开发资源较丰富。确点是需要PC支持,体积大等等。
二、real sense 的设备型号
1. real sense200系列
F200为前置摄像头,支持室内近距离。F200的硬件组成包括,一个IR camera,一个HD1080p camera,一个IR Laser projector。F200的3D扫描范围为25-54cm。点追踪范围30-85cm,速度1.5米/秒。

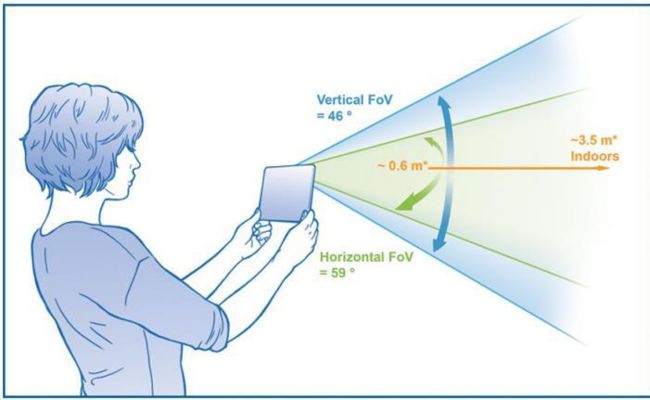
R200为后置摄像头,摄像头一般背对用户,旨在对周围环境的感知。有 3 个摄像头和惯性传感器。可提供 RGB(彩色)和立体红外图像,以生成深度。借助激光投影仪,该摄像头可进行三维扫描,获取场景感知和增强的摄影。 内部范围约 0.5-3.5 米,外部范围可达 10 米。R200集成了IMU数据,可以跟踪/定位:使用深度、RGB 和 IMU 数据,实时预估摄像头的位置和方位。只有 R200 支持场景感知、增强摄影和 3D 捕捉整个头部和身体。
R200的型号分为一代和二代。R200一代右边是“INTEL”标志,R200二代右边是“CREATIVE”标志。一代型号编号为946432,二代型号编号为VF0830。
英特尔® 实感™ 摄像头R200简介(面向世界)



1. 300系列的发布时间是2016年2月
SR300 是F200的升级版本, 与 F200 摄像头型号相似,SR300 使用编码光深技术,在更小范围内创建高质量的 3D 深度视频流。 SR300 摄像头的组件包括红外激光投影系统、高速 VGA 红外摄像头和具备集成 ISP 的 200 万像素彩色摄像头。 SR300 使用高速 VGA 深度模式替代了 F200 使用的本机 VGA 深度模式。 此新型深度模式降低了曝光时间,并且可以捕捉到高达 2 米/秒的动态动作。 该摄像头可向客户端提供同步颜色、深度和 IR 视频流数据,能够支持实现全新的平台使用方式。 摄像头深度解决方案的有效范围为室内 0.2 米至 1.2 米。3D扫描范围为25-70cm。点追踪范围20-150cm,速度2米/秒。景深/红外:每秒60帧时,分辨率640X480,RGB(红绿蓝);每秒30帧时,1080P要求USB3.0。
英特尔® 实感™ 前置摄像头 SR300 和 F200 的比较

intel版本


creative版本(Creative BlasterX Senz3d)

|
产品亮点
|
SR300
|
F200
|
|
方向
|
前置
|
前置
|
|
技术
|
编码光;高速 VGA 60 帧
|
编码光;本机 VGA 60 帧
|
|
彩色摄像头
|
多至 1080p 30 帧、720p 60 帧
|
多至 1080p 30 帧
|
|
SDK
|
SDK 2015 R5 或更新版本
|
SDK R2 或更新版本
|
|
DCM 版本
|
DCM 3.0.24.51819*
|
DCM 1.4.27.41994*
|
|
操作系统
|
Windows 10 64 位 RTM
|
Windows 10 64 位 RTM、 Windows 8 64 位
|
|
范围
|
室内:20 – 120 厘米
|
室内:20 – 120 厘米
|
zr300*是R300的升级版本,为后置摄像头。包含了惯性测量单元。貌似是创新公司产品,Intel很少提到,并不支持。VGA, 480x360, QVGA 分辨率。深度相机有效范围 0.55m to 2.8m。1080p 彩色相机输出。
3. 400系列(发布时间2018年1月)
https://click.intel.com/intelr-realsensetm-depth-camera-d415.html
D415的硬件包含了两个深度相机,一个RGB相机和一个结构光红外投影仪。深度卷帘相机(逐行扫描),红外结构光深度测距。

|
Use Environment
|
Indoor and Outdoor
|
|
Depth Technology
|
Active IR stereo
|
|
Main Intel® RealSense™ component
|
Intel® RealSense™ Vision Processor D4
Intel® RealSense™ module D410
|
|
Depth Field of View (FOV)—(Horizontal × Vertical × Diagonal)
|
69.4° x 42.5° x 77° (+/- 3°)
|
|
Depth Stream Output Resolution
|
Up to 1280 x 720
|
|
Depth Stream Output Frame Rate
|
Up to 90 fps
|
|
Minimum Depth Distance (Min-Z)
|
0.3m
|
|
Maximum Range
|
Approx. 10 meters; Varies depending on calibration, scene, and lighting condition
|
|
RGB Sensor Resolution and Frame Rate
|
1920 x 1080 at 30 fps
|
|
RGB Sensor FOV (Horizontal x Vertical x Diagonal)
|
69.4° x 42.5° x 77° (+/- 3°)
|
|
Camera Dimension (Length x Depth x Height)
|
99 mm x 20 mm x 23 mm
|
|
Connectors
|
USB 3.0 Type - C
|
|
Mounting Mechanism
|
One 1/4-20 UNC thread mounting point
Two M3 thread mounting points
|
D435 的特点是采用了全局相机。
https://click.intel.com/intelr-realsensetm-depth-camera-d435.html

|
Use Environment
|
Indoor/Outdoor
|
|
Depth Technology
|
Active IR Stereo (Global Shutter)
|
|
Main Intel® RealSense™ component
|
Intel® RealSense™ Vision Processor D4
Intel® RealSense™ module D430
|
|
Depth Field of View (FOV)—(Horizontal × Vertical × Diagonal)
|
91.2 x 65.5 x 100.6 (+/- 3°)
|
|
Depth Stream Output Resolution
|
Up to 1280 x 720
|
|
Depth Stream Output Frame Rate
|
Up to 90 fps
|
|
Minimum Depth Distance (Min-Z)
|
0.2m
|
|
Sensor Shutter Type
|
Global shutter
|
|
Maximum Range
|
Approx.10 meters; Varies depending on calibration, scene, and lighting condition
|
|
RGB Sensor Resolution and Frame Rate
|
1920 x 1080 at 30 fps
|
|
RGB Sensor FOV (Horizontal x Vertical x Diagonal)
|
69.4° x 42.5° x 77° (+/- 3°)
|
|
Camera Dimension (Length x Depth x Height)
|
90 mm x 25 mm x 25 mm
|
|
Connectors
|
USB 3.0 Type - C
|
|
Mounting Mechanism
|
One 1/4-20 UNC thread mounting point
Two M3 thread mounting points
|
三、realsense 驱动和开发包
目前,intel已经停止在官网发布RealSense和Computing后续版本的支持,将这些部分以开源的形式转到了GitHub。
Intel® RealSense SDK for Windows*
(Discontinued)
Intel® Perceptual Computing SDK
(Discontinued)
GitHub
1. 开发包版本与硬件
开发包由驱动、DCM、SDK三个部分组成。
|
DCM
|
SDK
|
CPU要求
|
|
|
F200
|
DCM 1.x 系列
|
2016 R2、2016 R3、
|
4th cpu,
OpenCL* 1.2
|
|
R200
|
DCM 2.x 系列
|
2016 R2、2016 R3、
|
4th cpu,
OpenCL* 1.2
|
|
SR300
|
DCM 3.x 系列
|
2016 R2、2016 R3、2.0(github)
|
6th cpu,
OpenCL* 1.2
|
|
D415/D435
|
2.0(github)
|
R200 和F200使用相同的SDK版本,但是DCM版本不一样,R200使用 DCM 2.x 系列,而 F200 使用 DCM 1.x
The
Intel® RealSense™ SDK for Windows*, the SDK components, and depth camera managers for the F200, SR300, and R200 versions will no longer be updated. You may continue to use the SDK with limited support, or use the Intel® RealSense™ Cross Platform API for camera access, and then develop on other platforms via
GitHub*.
For the Intel® RealSense™ SDK 2.0—our next generation SDK—support will only be available for Intel® RealSense™ cameras SR300 and D400-Series through GitHub. The
Intel® Perceptual Computing
SDK is also discontinued.
2.
Intel® RealSense SDK for Windows*
Intel® RealSense R3 SDK (2016 R3) Build date: 26 Dec 2016
Intel® RealSense™ SDK Essentials for Windows* 11.0
Serial number : CFKH-3MKGXTTK
Intel® RealSense™ SDK Hand Tracking for Windows* 11.0
Serial number : CXBD-KBK7DJL9
Intel® RealSense™ SDK Face Tracking & Recognition for Windows* 11.0
Serial number : CM4Z-DRH8FGJ5
Intel® RealSense™ SDK User Background Segmentation for Windows*11.0
Serial number : CR4P-T86JWPTT
Intel® RealSense™ SDK Cursor Mode for Windows* 11.0
Serial number : CV32-8VGBZMCS
Intel® RealSense™ SDK 3D Scan for Windows* 11.0
Serial number : CK38-SSV6F2C5
|
Required Hardware
|
F200: 4th generation (or later) Intel® Core™ processor
SR300: 6th generation (or later) Intel® Core™ processor
8 GB free hard disk space
Supported systems: Ultrabook™ devices, notebooks, 2 in 1s, and all-in-one PCs
An Intel® RealSense™ camera SR300 or F200
|
|
Required Operating System
|
F200: Microsoft Windows* 8.1 or 10 64 bit
SR300: Microsoft Windows® 10 64 bit
|
|
Supported Intel® RealSense™ Cameras
|
SR300
F200
|
|
Supported Languages
|
C++,
C# (Microsoft .NET* 4.0 Framework is required)
|
|
IDE for Samples and Tutorials
|
Microsoft Visual Studio* 2010-2015 or newer
Unity* Pro 5.2.3.p3 or later for Unity game development
|
3.
Intel® Perceptual Computing Challenge Winners
(
Intel® RealSense™ SDK 2.0
)
for the SR300 and D400-Series
3.1.develop on other platforms via
GitHub*
.
https://github.com/IntelRealSense/librealsense
介绍
https://github.com/IntelRealSense/librealsense/releases
版本下载
3.2.openCV 2.4 support
https://docs.opencv.org/2.4/doc/user_guide/ug_intelperc.html
- n.ImShow-最小OpenCV应用程序用于可视化深度数据
- n.GrabCuts-使用基于GrabCut算法的简单背景删除
- 潜伏期工具-利用计算机视觉进行基本时延估计
- DNN-用于实时目标检测的英特尔RealSense相机
参考资料
英特尔® 实感™ 前置摄像头 SR300 和 F200 的比较
https://software.intel.com/zh-cn/articles/a-comparison-of-intel-realsensetm-front-facing-camera-sr300-and-f200?language=fr