PCL 点云法线估计(直接从点云数据集中近似推断表面法线)、积分图进行法线估计
一、 点云法线估计(直接从点云数据集中近似推断表面法线)
1、尺度选择
根据所需要的细节需求为参考,选择确定的邻域所用的尺度。简言之,如果杯子手柄和圆柱体部分之间的边缘的曲率是重要的,那么需要足够小的尺度来捕获这些细节信息,而在其他不需要细节信息的应用中可选择大尺度。
2、法线估计代码
//估计法线
pcl::NormalEstimation ne;//实例化一个法线估计的对象
ne.setInputCloud (cloud);//设置输入点云
//创建一个空的kdtree对象,并把它传递给法线估计对象
//基于给出的输入数据集,kdtree将被建立
pcl::search::KdTree::Ptr tree (new pcl::search::KdTree ());
ne.setSearchMethod (tree);//设置近邻搜索方式
//输出数据集
pcl::PointCloud::Ptr cloud_normals (new pcl::PointCloud);
//使用半径在查询点周围3厘米范围内的所有邻元素
ne.setRadiusSearch (0.01);
//计算特征值
ne.compute (*cloud_normals);//法线存放至cloud_normals 3、全部代码
#include
#include
#include
#include
#include
#include
#include
#include
int
main ()
{
//加载点云
pcl::PointCloud::Ptr cloud (new pcl::PointCloud);
//体素滤波
pcl::PointCloud::Ptr cloud_filterd(new pcl::PointCloud);
pcl::io::loadPCDFile ("table_scene_lms400.pcd", *cloud);
//体素滤波
pcl::VoxelGrid sor;
sor.setInputCloud(cloud);
sor.setLeafSize(0.01,0.01,0.01);
sor.filter(*cloud_filterd);
std::cout<<"voxel filter succeed!"<size()<<" data points ("< ne;//实例化一个法线估计的对象
ne.setInputCloud (cloud);//设置输入点云
//创建一个空的kdtree对象,并把它传递给法线估计对象
//基于给出的输入数据集,kdtree将被建立
pcl::search::KdTree::Ptr tree (new pcl::search::KdTree ());
ne.setSearchMethod (tree);//设置近邻搜索方式
//输出数据集
pcl::PointCloud::Ptr cloud_normals (new pcl::PointCloud);
//使用半径在查询点周围3厘米范围内的所有邻元素
ne.setRadiusSearch (0.01);//如果曲率很重要,则减少这个尺度
//计算特征值
ne.compute (*cloud_normals);//法线存放至cloud_normals
std::cout<<"normals: "<points.size()<points.size ()应该与input cloud_downsampled->points.size ()有相同尺寸
//法线可视化
pcl::visualization::PCLVisualizer viewer("PCL Viewer");
int v1(0),v2(0);
viewer.createViewPort(0,0,0.5,1,v1);
viewer.createViewPort(0.5,0,1,1,v2);
viewer.setBackgroundColor (0.0, 0.0, 0.0,v1);
viewer.setBackgroundColor(0,20,0,v2);
viewer.addPointCloudNormals(cloud, cloud_normals,100,0.02,"cloud_mormals",v1);
//viewer.addPointCloudNormals(cloud, cloud_normals,v1);
pcl::visualization::PointCloudColorHandlerCustom singe_color2(cloud_filterd,255,0,0);
viewer.addPointCloud(cloud_filterd,singe_color2,"cloud_filterd",v2);
while (!viewer.wasStopped ())
{
viewer.spinOnce ();
}
return 0;
}
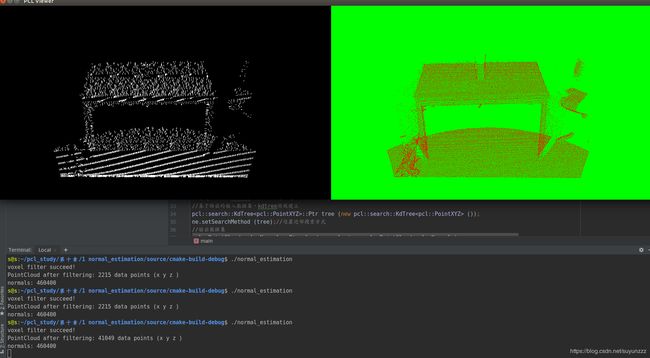
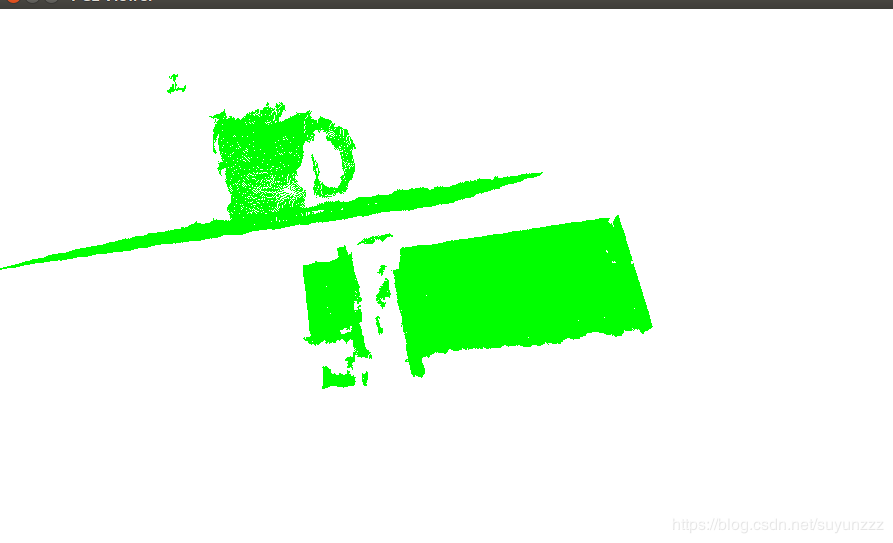
4、可视化
左侧为估计的法线,右侧为下采样的结果
二、使用积分图进行法线估计
注:积分图法线估计只适用于有序点云
1、积分图法线估计代码
#include //积分图法线估计头文件
//估计法线
pcl::PointCloud::Ptr normals (new pcl::PointCloud);
pcl::IntegralImageNormalEstimation ne;//创建一个积分图法线估计对象
ne.setNormalEstimationMethod (ne.AVERAGE_3D_GRADIENT);//估计方法
ne.setMaxDepthChangeFactor(0.02f);//最大深度变化系数
ne.setNormalSmoothingSize(10.0f);//优化法线方向时考虑邻域大小
ne.setInputCloud(cloud);//输入点云
ne.compute(*normals);//将结果保存至normals 2、全部代码
#include
#include
#include
#include
int
main ()
{
//加载点云
pcl::PointCloud::Ptr cloud (new pcl::PointCloud);
pcl::io::loadPCDFile ("table_scene_mug_stereo_textured.pcd", *cloud);
//估计法线
pcl::PointCloud::Ptr normals (new pcl::PointCloud);
pcl::IntegralImageNormalEstimation ne;//创建一个积分图法线估计对象
ne.setNormalEstimationMethod (ne.AVERAGE_3D_GRADIENT);//估计方法
ne.setMaxDepthChangeFactor(0.02f);//最大深度变化系数
ne.setNormalSmoothingSize(10.0f);//优化法线方向时考虑邻域大小
ne.setInputCloud(cloud);//输入点云
ne.compute(*normals);//将结果保存至normals
//法线可视化
pcl::visualization::PCLVisualizer viewer("PCL Viewer");
viewer.initCameraParameters();
int v1(0);//显示原始数据
int v2(0);//显示法线估计
viewer.createViewPort(0,0,0.5,1,v1);
viewer.createViewPort(0.5,0,1,1,v2);
viewer.setBackgroundColor (20,20,20,v1);//原始点云
viewer.setBackgroundColor (0.0, 0.0, 0.5,v2);
viewer.addPointCloudNormals(cloud, normals,100,0.02f,"cloud_normals",v2);//将法线显示在第二个窗口
viewer.initCameraParameters();
viewer.addPointCloud(cloud,"cloud_in",v1);//第一个窗口显示原始点云
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR,0,156,0,"cloud_in",v1);//原始点云颜色
while (!viewer.wasStopped ())
{
viewer.spinOnce ();
}
return 0;
}
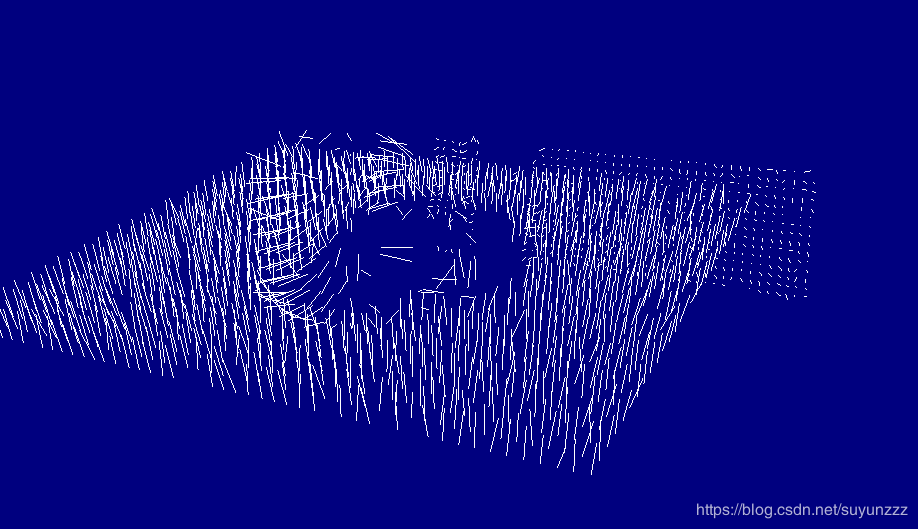
3、可视化
原数据(必须是有序点云)
法线估计结果