Vins-mono 源码笔记 (2) estimator_node
estimator_node
- 总结
- 1、数据的处理
- 1.1 IMU数据的处理
- 1.2 图像特征的处理
- 2、measurement_process
- 2.1 process()
- 2.2 getMeasurements()
- 2.3 IMU 数据处理
- 2.4 图像特征的处理
- 2.4.1、processImage()
- 2.4.1.1. addFeatureCheckParallax
- 2.4.2 frame的定义
总结
该节点:
1、接受并处理发送来的IMU数据。
2、处理前端节点发送的特征数据。
3、运行线程 measurement_process。
运行梳理:

1、数据的处理
1.1 IMU数据的处理
imu的数据在回调函数 imu_callback 进行处理 ,在imu_callback()函数中主要执行:
1、检查时间戳 看是否乱序。
2、将IMU数据 imu_msg 存入IMU数据缓存队列imu_buf。
3、(这里对源码有些改动)如果初始化完成,即进入优化模式,每当有IMU数据进来,都用该数据预测当前时刻的位姿PVQ并发布。
// IMU的数据回调
void imu_callback(const sensor_msgs::ImuConstPtr &imu_msg)
{
// 检查时间戳 看是否乱序
if (imu_msg->header.stamp.toSec() <= last_imu_t)
{
ROS_WARN("imu message in disorder!");
return;
}
last_imu_t = imu_msg->header.stamp.toSec();
// 将IMU数据存入IMU数据缓存队列imu_buf
m_buf.lock();
imu_buf.push(imu_msg);
m_buf.unlock();
con.notify_one(); // 唤醒getMeasurements()读取缓存imu_buf和feature_buf中的观测数据
// 通过IMU测量值积分更新并发布里程计信息
// last_imu_t = imu_msg->header.stamp.toSec(); // 这一行代码似乎重复了,上面有着一模一样的代码
{
std::lock_guard<std::mutex> lg(m_state);
if (initialized){ // VINS初始化已完成,正处于滑动窗口非线性优化状态,如果VINS还在初始化,则不发布里程计信息
// IMU航迹推算 更新 tmp_P、tmp_V、 tmp_Q 这里只是预测吧
predict(imu_msg);
std_msgs::Header header = imu_msg->header;
header.frame_id = "world";
pubLatestOdometry(tmp_P, tmp_Q, tmp_V, header); // 发布里程计信息,发布频率很高(与IMU数据同频),每次获取IMU数据都会及时进行更新,而且发布的是当前的里程计信息。
// 还有一个pubOdometry()函数,似乎也是发布里程计信息,但是它是在estimator每次处理完一帧图像特征点数据后才发布的,有延迟,而且频率也不高(至多与图像同频)
}
}
}
void predict(const sensor_msgs::ImuConstPtr &imu_msg)
采用中值积分对imu状态进行传播。
void predict(const sensor_msgs::ImuConstPtr &imu_msg)
{
double t = imu_msg->header.stamp.toSec();
// 这里 latest_time在update()初始化
double dt = t - latest_time;
latest_time = t;
double dx = imu_msg->linear_acceleration.x;
double dy = imu_msg->linear_acceleration.y;
double dz = imu_msg->linear_acceleration.z;
Eigen::Vector3d linear_acceleration{dx, dy, dz};
double rx = imu_msg->angular_velocity.x;
double ry = imu_msg->angular_velocity.y;
double rz = imu_msg->angular_velocity.z;
Eigen::Vector3d angular_velocity{rx, ry, rz};
// 中值积分 第1个imu数据如何保存为acc_0 gyr_0 ????
Eigen::Vector3d un_acc_0 = tmp_Q * (acc_0 - tmp_Ba) - estimator.g; // 上一刻加速度
Eigen::Vector3d un_gyr = 0.5 * (gyr_0 + angular_velocity) - tmp_Bg;
// 更新预测旋转Q
tmp_Q = tmp_Q * Utility::deltaQ(un_gyr * dt); // 更新旋转
Eigen::Vector3d un_acc_1 = tmp_Q * (linear_acceleration - tmp_Ba) - estimator.g; // 当前加速度
Eigen::Vector3d un_acc = 0.5 * (un_acc_0 + un_acc_1); // 中值
// 更新 预测速度V 和预测平移 P
tmp_P = tmp_P + dt * tmp_V + 0.5 * dt * dt * un_acc;
tmp_V = tmp_V + dt * un_acc;
acc_0 = linear_acceleration;
gyr_0 = angular_velocity;
}
1.2 图像特征的处理
图像特征的处理在回调函数 feature_callback中完成,其中主要执行:
1、第一帧图像特征不处理。
2、将图像特征点数据存入图像特征点数据缓存队列feature_buf。
2、measurement_process
节点启动后,每当有IMU或者图像特征数据发送过来便立马回到回调函数中处理,将它们放到数组中,同时measurement_process线程也在不停的运行 process()。
2.1 process()
process() 流程:
1、调用getMeasurements()读取当前积累的IMU与图像数据到measurements。
注意,线程执行到这里时,会调用条件变量函数
con.wait(lk, [&]
{
return (measurements = getMeasurements()).size() != 0;
});
如果里面的lamda表达式入法返回true的话,则会阻塞线程(此时lk解锁),之后每当有imu数据或者图像特征数据到来,都会在回调函数中调用con.notify_one()从而唤醒wait()函数(此时lk上锁),此时,继续判断lamda表达式,如果返回true,则线程向下运行,否则继续阻塞。
参考
2、 measurements 保存的是当前从IMU 图像队列中提取的图像特征数据和对应的IMU测量信息的pair,遍历每一组图像特征以及其匹配的IMU数据:
(1)、遍历该组全部IMU数据,执行IMU数据处理 processIMU(),求解预积分。
(2)、对图像特征进行处理 processImage(),进行紧耦合优化 。
(3)、重定位相关… 待学习 !!!
(4)、发布解算结果:
double whole_t = t_s.toc();
printStatistics(estimator, whole_t);
std_msgs::Header header = img_msg->header;
header.frame_id = "world";
// 每处理完一帧图像特征点数据,都要发布这些话题
pubOdometry(estimator, header);
pubKeyPoses(estimator, header);
pubCameraPose(estimator, header);
pubPointCloud(estimator, header);
pubTF(estimator, header);
pubKeyframe(estimator);
if (relo_msg != NULL)
pubRelocalization(estimator);
3、本轮求解完毕后,先上锁m_state、m_buf,锁定 imu_buf,让imu_callback()等待update()更新完状态, update()用优化后的结果更新 tmp_P、tmp_Q、tmp_V等。
m_buf.lock();
m_state.lock(); // 上锁 回调函数的预测部分等待update()完成 不上锁的话 运行update()时 会被imu_callback给打断 然后改变 latest_time acc_0、gyr_0等数据
// 然后就乱了
if (estimator.solver_flag == Estimator::SolverFlag::NON_LINEAR)
// VINS系统完成滑动窗口优化后,用优化后的结果,更新里程计数据
update();
m_state.unlock();
m_buf.unlock();
update() 如下
// 当处理完measurements中的所有数据后,如果VINS系统正常完成滑动窗口优化,那么需要用优化后的结果更新以下数据,用于预测
void update()
{
TicToc t_predict;
latest_time = current_time;
// 首先获取滑动窗口中最新帧的P、V、Q
tmp_P = estimator.Ps[WINDOW_SIZE];
tmp_Q = estimator.Rs[WINDOW_SIZE];
tmp_V = estimator.Vs[WINDOW_SIZE];
tmp_Ba = estimator.Bas[WINDOW_SIZE];
tmp_Bg = estimator.Bgs[WINDOW_SIZE];
acc_0 = estimator.acc_0;
gyr_0 = estimator.gyr_0;
if(!initialized) initialized = 1;
// 滑动窗口中最新帧并不是当前帧,中间隔着缓存队列的数据,所以还需要使用缓存队列中的IMU数据进行积分得到当前帧的里程计信息 这样使得精度更高
queue<sensor_msgs::ImuConstPtr> tmp_imu_buf = imu_buf;
for (sensor_msgs::ImuConstPtr tmp_imu_msg; !tmp_imu_buf.empty(); tmp_imu_buf.pop())
predict(tmp_imu_buf.front());
}
2.2 getMeasurements()
getMeasurements() 流程:
注意要读取的数据是std::vector
1、检查imu_buf,feature_buf 3个情况需要特殊处理:
(1)、imu_buf或者feature_buf有一个为空,则返回当前构建的measurements。
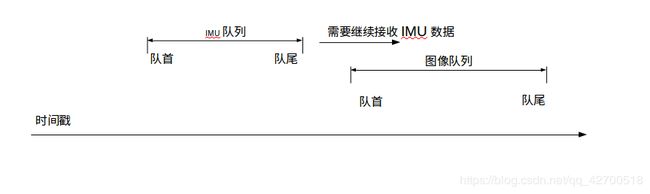
(2)、imu_buf队尾(最近获得的)元素的时间戳,早于或等于feature_buf队首元素的时间戳(时间偏移补偿后),则说明当前IMU数据不足够衡量图像帧间的运动,需要继续等待接收IMU数据,返回当前构建的measurements。如下图所示。
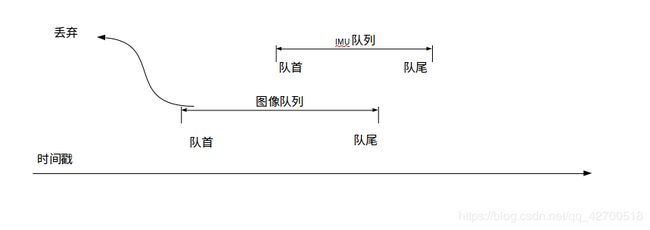
(3)、imu_buf队首(最早的数据)元素的时间戳,晚于或等于feature_buf队首元素的时间戳(时间偏移补偿后),则显然feature_buf队首的图像特征以无法和imu关联了 ,需要剔除feature_buf队首图像数据。如下图:
2、将feature_buf的队首图像特征,以及时间戳小于它的IMU数据,注意还要再加上后面一帧IMU数据用于插值出 img的加速度 角速度值 ,一起构成pair
可以想到,只有当imu_buf,feature_buf积累了足够多的数据时(imu_buf,feature_buf非空&imu_buf队首时间戳

2.3 IMU 数据处理
process()中处理IMU数据的部分如下:
//遍历该组中的各帧imu数据,进行预积分
for (auto &imu_msg : measurement.first)
{
double t = imu_msg->header.stamp.toSec(); // 最新IMU数据的时间戳
double img_t = img_msg->header.stamp.toSec() + estimator.td; // 图像特征点数据的时间戳,补偿了通过优化得到的一个时间偏移
if (t <= img_t) // 补偿时间偏移后,图像特征点数据的时间戳晚于或等于IMU数据的时间戳
{
if (current_time < 0) // 第一次接收IMU数据时会出现这种情况
current_time = t;
double dt = t - current_time; // 对于每一次的第一个imu数据 这个dt是与上一帧图像之间的时间差 否则是和上一个imu的时间差
ROS_ASSERT(dt >= 0);
current_time = t; // 更新最近一次接收的IMU数据的时间戳
// IMU数据测量值
// 3轴加速度测量值
dx = imu_msg->linear_acceleration.x;
dy = imu_msg->linear_acceleration.y;
dz = imu_msg->linear_acceleration.z;
// 3轴角速度测量值
rx = imu_msg->angular_velocity.x;
ry = imu_msg->angular_velocity.y;
rz = imu_msg->angular_velocity.z;
// 预积分
estimator.processIMU(dt, Vector3d(dx, dy, dz), Vector3d(rx, ry, rz));
//printf("imu: dt:%f a: %f %f %f w: %f %f %f\n",dt, dx, dy, dz, rx, ry, rz);
}
else // 时间戳晚于图像特征点数据(时间偏移补偿后)的第一帧IMU数据(也是一组measurement中的唯一一帧),对IMU数据进行插值,得到图像帧时间戳对应的IMU数据
{
// 时间戳的对应关系如下图所示:
// current_time t
// * * * * * (IMU数据)
// | (图像特征点数据)
// img_t
double dt_1 = img_t - current_time;
double dt_2 = t - img_t;
current_time = img_t; // 对于最后这个在img后面的imu数据 current_time记录的是img的时间
ROS_ASSERT(dt_1 >= 0);
ROS_ASSERT(dt_2 >= 0);
ROS_ASSERT(dt_1 + dt_2 > 0);
// 计算插值系数 这么来算 dx + (cx - dx)*dt_1/(dt_1+dt_2)
double w1 = dt_2 / (dt_1 + dt_2);
double w2 = dt_1 / (dt_1 + dt_2);
// 插值出img处imu的近似值
dx = w1 * dx + w2 * imu_msg->linear_acceleration.x;
dy = w1 * dy + w2 * imu_msg->linear_acceleration.y;
dz = w1 * dz + w2 * imu_msg->linear_acceleration.z;
rx = w1 * rx + w2 * imu_msg->angular_velocity.x;
ry = w1 * ry + w2 * imu_msg->angular_velocity.y;
rz = w1 * rz + w2 * imu_msg->angular_velocity.z;
// 预积分
estimator.processIMU(dt_1, Vector3d(dx, dy, dz), Vector3d(rx, ry, rz));
//printf("dimu: dt:%f a: %f %f %f w: %f %f %f\n",dt_1, dx, dy, dz, rx, ry, rz);
}
}
对每一个IMU数据,按时间前于或落后与图像帧进行分别处理。
首先计算与上一个IMU数据current_time的时间差dt,
然后通过processIMU()更新预积分, processIMU() 详细总结在 IMU,
每一次处理,都会有且只有一个IMU数据落后于图像帧,对于这个IMU数据,将其和前一个IMU数据插值出图像帧位置的IMU数据,并将图像帧位置的时间戳赋值给current_time。
2.4 图像特征的处理
process()中处理图像特征的部分如下:
// 将图像特征点数据存到一个map容器中,key是特征点id 这里还考虑了可能有多个相机 但是我们只考虑单目的清况
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> image; // < 特征点id, <相机id, 特征点 > >
for (unsigned int i = 0; i < img_msg->points.size(); i++)
{
int v = img_msg->channels[0].values[i] + 0.5; // 四舍五入 = p_id * NUM_OF_CAM + i
int feature_id = v / NUM_OF_CAM; // v = p_id
int camera_id = v % NUM_OF_CAM; // 相机序号 NUM_OF_CAM = 1 这里 v = 0
// 获得归一化平面的坐标 cur_un_pts
double x = img_msg->points[i].x;
double y = img_msg->points[i].y;
double z = img_msg->points[i].z;
// 像素坐标 cur_pts
double p_u = img_msg->channels[1].values[i];
double p_v = img_msg->channels[2].values[i];
// 像素在x,y上的速度 pts_velocity
double velocity_x = img_msg->channels[3].values[i];
double velocity_y = img_msg->channels[4].values[i];
ROS_ASSERT(z == 1);
Eigen::Matrix<double, 7, 1> xyz_uv_velocity;
xyz_uv_velocity << x, y, z, p_u, p_v, velocity_x, velocity_y;
image[feature_id].emplace_back(camera_id, xyz_uv_velocity); // camera_id = 0
}
estimator.processImage(image, img_msg->header);
这部分简单说就是,将图像特征点数据构造为 map
estimator.processImage(image, img_msg->header)。
上面看到有这么多的数据,难免会迷糊,所以赶紧去feature_tracker节点回顾下到底发布了啥信息。这部分对应代码在feature_tracker_node.cpp中的img_callback()中:
vector<set<int>> hash_ids(NUM_OF_CAM);
for (int i = 0; i < NUM_OF_CAM; i++)
{
auto &un_pts = trackerData[i].cur_un_pts; // 去畸变特征点
auto &cur_pts = trackerData[i].cur_pts; // 原始特征点
auto &ids = trackerData[i].ids; // ID
auto &pts_velocity = trackerData[i].pts_velocity; // 特征点速度
// 遍历全部特征点
for (unsigned int j = 0; j < ids.size(); j++)
{ // 将跟踪的帧数大于1的 track_cnt ids un_pts一一对应
if (trackerData[i].track_cnt[j] > 1)
{
int p_id = ids[j]; // 获取id
// 插入到 set中 按id顺序
hash_ids[i].insert(p_id);
geometry_msgs::Point32 p;
p.x = un_pts[j].x;
p.y = un_pts[j].y;
p.z = 1;
// 一下容器元素均是一一对应的
feature_points->points.push_back(p); // 去畸变后的归一化坐标
id_of_point.values.push_back(p_id * NUM_OF_CAM + i); // i = 0 NUM_OF_CAM = 1 这样 /NUM_OF_CAM = p_id %NUM_OF_CAM = i
u_of_point.values.push_back(cur_pts[j].x);
v_of_point.values.push_back(cur_pts[j].y);
velocity_x_of_point.values.push_back(pts_velocity[j].x);
velocity_y_of_point.values.push_back(pts_velocity[j].y);
}
}
}
// 对sensor_msgs::PointCloudPtr的各个channels进行赋值
feature_points->channels.push_back(id_of_point); // channels[0]
feature_points->channels.push_back(u_of_point); // channels[1] .....
feature_points->channels.push_back(v_of_point);
feature_points->channels.push_back(velocity_x_of_point);
feature_points->channels.push_back(velocity_y_of_point);
2.4.1、processImage()
void Estimator::processImage(const map
processImage() 利用获得的图像特征数据与IMU数据执行紧耦合优化,
它的基本流程如下:

注意:
1、图像特征的处理: 首先将每一帧的图像特征数据添加到feature ,然后根据视差与跟踪数量选择是marg掉滑动窗口的最老的一帧还是第二最新帧。但是,这个marg一定是在滑动窗口滑动窗口填满之后才进行。 然后,Headers数组记录当前帧的时间戳,Headers数组只保存滑动窗口的所有帧的数据,构造图像帧ImageFrame imageframe , 并构造make_pair(header.stamp.toSec(), imageframe)添加到all_image_frame,从第一帧开始所有的图像帧都会添加到all_image_frame, all_image_frame 中元素的删除在 SlideWindow()。
2、如果外参数为止的话则进行外参在线标定,外参标定从第二帧开始,先获取与前一帧的特征点匹配关系,然后进行标定计算,当一个滑动窗口所有帧(2-11)都进行了标定计算后,且第二小奇异值大于阈值,才认为标定完成,若一整个滑动窗口的数据都不能完成标定,则在后面进行滑动窗口marg掉一帧,新的帧来了之后再继续标定。
3、最开始需要完成初始化,初始化需要等滑动窗口填满后才进行,并且也要保证已经成功获取了外参,当外参标定完成后,会紧接着执行初始化,如果初始化失败了,那么就marg掉一帧, 下一帧来了后再进行初始化,直到初始化完成。
2.4.1.1. addFeatureCheckParallax
bool FeatureManager::addFeatureCheckParallax(int frame_count, const map
特征管理器类FeatureManager的成员函数,定义在feature_manager.cpp中。
processImage()中使用代码如下
if (f_manager.addFeatureCheckParallax(frame_count, image, td))
marginalization_flag = MARGIN_OLD;
else
marginalization_flag = MARGIN_SECOND_NEW;
流程:
1、将image的全部特征点数据添加到feature list中。首先判断该特征点的id在滑动窗口特征点中是否存在,即查找 feature 中有无相同的id。如果不存在,则创建新的FeaturePerId添加到feature中,否则将该特征点在当前帧的信息添加到已有特征点的feature_per_frame容器中。
2、如果滑动窗口中已有特征点与当前图像特征点的匹配个数不足20,则 return true,即 将最老的一帧marg掉,第二新的帧作为关键帧。
3、计算第2最新帧和第3最新帧之间跟踪到的特征点的平均视差,如果平均视差大于等于可以接受的最小视差,说明移动有点大了,这样则将第2最新帧当作关键帧,marg掉最老的帧,否则marg掉第二新帧。
2.4.2 frame的定义
// 图像帧
class ImageFrame
{
public:
ImageFrame(){};
ImageFrame(const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>>& _points, double _t):t{_t},is_key_frame{false}
{
points = _points;
};
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>> > > points; // 特征点数据
double t; // 时间戳
Matrix3d R; // 旋转
Vector3d T; // 平移
IntegrationBase *pre_integration; // 该帧的预积分
bool is_key_frame; // 是否为关键帧
};
一个图像帧保存所有特征点数据、时间戳、位姿、以及预积分量。