Transformer
Transformer
利用self-attention和position embedding克服了RNN中的长距离依赖、无法并行计算的缺点,也解决了CNN中远距离特征捕获难的问题。
encoder
encoder由6层相同的层组成,每一层分别由两部分组成:
第一部分: multi-head self-attention mechanism
第二部分:position-wise feed-forward network 是一个全连接层两个部分都有一个残差连接(residual connection)接一个layer normalization。
decoder
decoder由6个相同的层组成,每一层包括以下3个部分:
第一部分: multi-head self-attention mechanism
第二部分: multi-head context-attention mechanism
第三部分: position-wise feed-forward network每一个部分都有一个残差连接,后接一个layer normalization。
Scaled dot-product attention
论文中的描述:通过确定Q和K之间的相似程度来选择V!
为什么要加缩放因子呢?
当dk很大时,点积得到的结果维度很大,使得结果处于softmax函数梯度很小的区域。梯度很小的情况,对于反向传播不利。

K,Q,V是什么?
* 在encoder的self-attention中, Q、K、V都来自同一个地方(相等),他们是上一层encoder的输出。对于第一层encoder,它们就是word embedding和positional encoding相加得到的输入。
* 在decoder的self-attention中,Q、K、V都来自于同一个地方(相等),它们是上一层decoder的输出。对于第一层decoder,它们就是word embedding和positional encoding相加得到的输入。但是对于decoder,我们不希望它能获得下一个time step(即将来的信息)因此我们需要进行sequence masking。
* 在encoder-decoder attention中,Q来自于decoder的上一层的输出,K和V来自于encoder的输出,K和V是一样的。
其中mask:scores.masked_fill(mask = 0, -1e9),用于把mask是0的变成一个很小的数,这样后面经过softmax之后的概率就很接近零(但是理论上还是用来很少一点点未来的信息)。
Multi-head attention
理解了Scaled dot-product attention,Multi-head attention也很简单了。论文提到,他们发现将Q、K、V通过一个线性映射之后,分成 h份,对每一份进行scaled dot-product attention效果更好。然后,把各个部分的结果合并起来,再次经过线性映射,得到最终的输出。这就是所谓的multi-head attention。上面的超参数h就是heads数量。论文默认是8。上面说的分成h份是在dk,dq,dv维度上面进行切分的。因此,进入到scaled dot-profuct attention的dk实际上等于未进入之前的D_model/h。(512/8)
context-attention
它是encoder和decoder之间的attention!所以,你也可以称之为encoder-decoder attention!
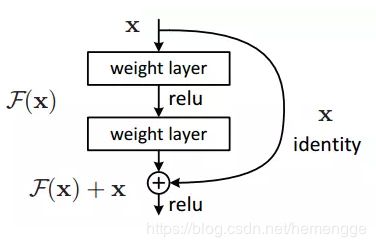
Residual connection
假设网络中某个层对输入x作用后的输出是F(x),那么增加residual connection之后,就变成了:F(x)+x。这个+x操作就是一个shortcut。残差结构的好处:因为增加了一项x,那么该层网络对x求偏导的时候,多了一个常数项1,所以在反向传播过程中,梯度连乘,也不会造成梯度消失。
layer normalization
Normalization有很多种,但是它们都有一个共同的目的,那就是把输入转化成均值为0方差为1的数据。我们在把数据送入激活函数之前进行normalization(归一化),因为我们不希望输入数据落在激活函数的饱和区。Batch Normalization (BN)的主要思想就是:在每一层的每一批数据上进行归一化。我们可能会对输入数据进行归一化,但是经过该网络层的作用后,我们的的数据已经不再是归一化的了。随着这种情况的发展,数据的偏差越来越大,我的反向传播需要考虑到这些大的偏差,这就迫使我们只能使用较小的学习率来防止梯度消失或者梯度爆炸。
MASK
Transformer模型里面涉及两种mask。分别是padding mask和sequence mask。 其中,padding mask在所有的scaled dot-product attention里面都需要用到,而sequence mask只有在decoder的self-attention里面用到。
什么是padding mask呢?回想一下,我们的每个批次输入序列长度是不一样的!也就是说,我们要对输入序列进行对齐!具体来说,就是给在较短的序列后面填充0。因为这些填充的位置,其实是没什么意义的,所以我们的attention机制不应该把注意力放在这些位置上,所以我们需要进行一些处理。 具体的做法是,把这些位置的值加上一个非常大的负数(可以是负无穷),这样的话,经过softmax,这些位置的概率就会接近0! 而我们的padding mask实际上是一个张量,每个值都是一个Boolen,值为fasle的地方就是我们要进行处理的地方。
sequence mask是为了使得decoder不能看见未来的信息。也就是对于一个序列,在time_step为t的时刻,我们的解码输出应该只能依赖于t时刻之前的输出,而不能依赖t之后的输出。因此我们需要想一个办法,把t之后的信息给隐藏起来。 那么具体怎么做呢?也很简单:产生一个上三角矩阵,上三角的值全为1,下三角的值权威0,对角线也是0。把这个矩阵作用在每一个序列上,就可以达到我们的目的啦。
Decoder和Encoder有一个关键的不同:Decoder在解码第t个时刻的时候只能使用1…t时刻的输入,而不能使用t+1时刻及其之后的输入。因此我们需要一个函数来产生一个Mask矩阵,代码如下:
def subsequent_mask(size):
"Mask out subsequent positions."
attn_shape = (1, size, size)
subsequent_mask = np.triu(np.ones(attn_shape), k=1).astype('uint8')
return torch.from_numpy(subsequent_mask) = 0
它的输出:
print(subsequent_mask(5))
输出 1 0 0 0 0
1 1 0 0 0
1 1 1 0 0
1 1 1 1 0
1 1 1 1 1
我们发现它输出的是一个方阵,对角线和下面都是1。第一行只有第一列是1,它的意思是时刻1只能attend to输入1,第三行说明时刻3可以attend to {1,2,3}而不能attend to{4,5}的输入,因为在真正Decoder的时候这是属于Future的信息。知道了这个函数的用途之后,上面的代码就很容易理解了。代码首先使用triu产生一个上三角阵:
0 1 1 1 1
0 0 1 1 1
0 0 0 1 1
0 0 0 0 1
0 0 0 0 0
然后需要把0变成1,把1变成0,这可以使用 matrix == 0来实现。
positional encoding
就目前而言,我们的Transformer架构似乎少了点什么东西。没错,就是它对序列的顺序没有约束!我们知道序列的顺序是一个很重要的信息,如果缺失了这个信息,可能我们的结果就是:所有词语都对了,但是无法组成有意义的语句!为了解决这个问题。论文提出了Positional encoding。这是啥?一句话概括就是:对序列中的词语出现的位置进行编码!如果对位置进行编码,那么我们的模型就可以捕捉顺序信息!那么具体怎么做呢?论文的实现很有意思,使用正余弦函数。公式如下:
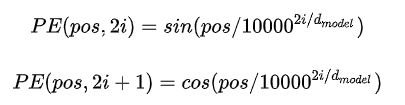
其中,pos是指词语在序列中的位置,可以看出,在偶数位置,使用正弦编码,在奇数位置使用余弦编码。这个编码公式的意思就是:给定词语的位置pos,我们可以把它编码成d_model维的向量!也就是说,位置编码的每一个维度对应正弦曲线,波长构成了从2pai到10000*2pai的等比序列。上面的位置编码是绝对位置编码。但是词语的相对位置也非常重要。这就是论文为什么要使用三角函数的原因!正弦函数能够表达相对位置信息。,主要数学依据是以下两个公式:

上述公式说明,对于词汇之间的位置偏移k,PE(pos+k)可以表示成PE(pos)和PE(k)的组合形式,这就是表达相对位置的能力。