ROS系统基础知识梳理(四) 串口通信
ROS系统基础知识梳理(四) 串口通信
学习ROS系统,初步接触到ROS系统外接传感器,传感器通过Uart通信向台式机发送数据,内容涉及到ROS调用串口数据、串口数据校验、以及欧拉角转换四元数。
任务系统:Ubuntu18.04LTS
ROS Melodic
传感器:WT61c(加速度传感器、6轴陀螺仪)
类声明
针对要处理的数据定义类
#ifndef WT61CUART_H
#define WT61CUART_H
#include
#include
#include
#include "ros/ros.h"
#include "serial/serial.h"
#include "std_msgs/String.h"
#include "std_msgs/Empty.h"
#include "sensor_msgs/Imu.h"
#include "geometry_msgs/Twist.h"
#include "tf/LinearMath/Quaternion.h"
#define PI 3.14159
namespace WTU {
class Wt61cUart { //整个类基于serial封装,整理出了ROS常用接口
private: //包括波特率/uart端口号/ROS系统内的话题名称等
int baudrate_,index_; //index_初始化置零,用作变长数组索引
std::string com_;
serial::Serial ser; //serial类,实现对串口控制的核心操作
double g_;
std::vector UartData_;
std::string topic_pub_;
ros::Publisher wt61c_pub_;
ros::Publisher wt61c_turtle_;
public:
Wt61cUart(ros::NodeHandle&);
~Wt61cUart();
int TranslateAndPub();
int UartInit(); //串口初始化,按照launch文件上传的参数初始化串口
int GetAndCheck(); //校验函数
};
}
#endif
ROS调用串口
ROS系统有专门用于调用串口进行通信的数据包:serial。
serial::Serial Class Reference:docs.ros.org/jade/api/serial/html/classserial_1_1Serial.html
利用serial命名空间下的Serial类可实现ros对于串口的调用。
//串口初始化程序
int WTU::Wt61cUart::UartInit() {
try{
ser.setPort(com_); //按照launch文件设置的端口号和波特率初始化串口
ser.setBaudrate(baudrate_);
serial::Timeout to = serial::Timeout::simpleTimeout(1000); //设置截止时间
ser.setTimeout(to);
ser.open();
}
catch(serial::IOException& e){
ROS_ERROR_STREAM("Unable to open port. Please try again.");
return -1;
}
if(ser.isOpen()) {
//ser.flushInput();
ROS_INFO_STREAM("The port initialize succeed.");
ser.flushInput(); //清空输入缓存,把多余的无用数据删除
sleep(0.1); //延时0.1秒,确保有数据进入
return 0;
}
else
return -1;
}
数据读取与校验
ROS的串口读取用serial类中的read()函数来实现,相对于程序执行速度来讲读取速度略慢,所以按字节读取易产生bug,利用available()返回值做参数,可一次性读取串口buffer里面的全部数据,程序执行理论上会快一些.
以available()做为参数,将buffer内容全部读取到内存中来,然后按位判断包头位置,所余数据不足一包时再次读取buffer中的数据,然后进行校验.
int WTU::Wt61cUart::GetAndCheck() {
int i,j; //校验计数位
int sum = 0x55; //数据和,初始化为0x55.wt61c发送数据包包头为0x55
while(UartData_.size()-index_<33){ //当数据校验成功并且解析发送之后,index_再次置零并且删除已处理的数据.
while(ser.available()<33){ROS_INFO("wait");} //保证读取大于33byte数据,即一个完整的数据包
ser.read(UartData_,ser.available());
}
while(true){
if(UartData_[index_] ==0x55 && UartData_[index_+1] ==0x51){
//检测到index_指向的数据为0x55,并且第二个数据为0x51,此时,大概率检测到数据包头
for (i= 1; i<10; i++)
sum+= UartData_[index_+i]; //和校验
if(UartData_[index_+10] == sum%0x100)
j = 1;
sum = 0x55;
for (i= 12; i<21; i++)
sum+= UartData_[index_+i];
if(UartData_[index_+21] == sum%0x100)
j++;
sum = 0x55;
for (i= 23; i<32; i++)
sum+= UartData_[index_+i];
if(UartData_[index_+32] == sum%0x100)
j++;
if (j = 3){ //校验位通过
ROS_INFO("Yes,I got a complete package.");
return 0;
}
else{ //校验位未通过,则表明index_ 指向的并非包头,index_自增,进行下一次循环检测
sum = 0x55;
index_++;
}
}
else
index_++;
while(UartData_.size()-index_-32<33){ //若剩余数据不足33,即一个包的大小,则补入数据
while(ser.available()<33){}
ser.read(UartData_,ser.available());
}
}
}
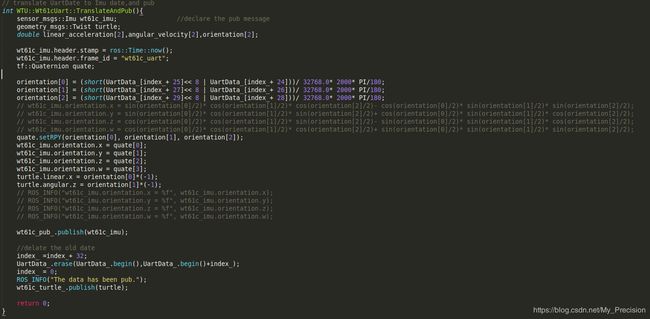
欧拉角转四元数
欧拉角转化四元数,ROS中的TF包中函数可以实现
头文件:#include "tf/LinearMath/Quaternion.h"
函数:tf::Quaternion::setRPY()
 GitHub:wt61c_uart
GitHub:wt61c_uart