视觉里程计1(slam十四讲ch7)——特征点,特征匹配
Brook_icv 转载于 https://www.cnblogs.com/wangguchangqing/p/8076061.html
slamcn.org:高翔和他的朋友们做的一个系统介绍slam的网站
大牛讲堂|SLAM最终话:视觉里程计
1.概念:什么是里程计?
在里程计问题中,我们希望测量一个运动物体的轨迹。这可以通过许多不同的手段来实现。例如,我们在汽车轮胎上安装计数码盘,就可以得到轮胎转动的距离,从而得到汽车的估计。或者,也可以测量汽车的速度、加速度,通过时间积分来计算它的位移。完成这种运动估计的装置(包括硬件和算法)叫做里程计(Odometry)。
2.特性:里程计的特性?
里程计一个很重要的特性,是它只关心局部时间上的运动,多数时候是指两个时刻间的运动。当我们以某种间隔对时间进行采样时,就可估计运动物体在各时间间隔之内的运动。由于这个估计受噪声影响,先前时刻的估计误差,会累加到后面时间的运动之上,这种现象称为漂移(Drift)。
3.概念:什么是视觉里程计?
视觉里程计VO的目标是根据拍摄的图像估计相机的运动。它的主要方式分为特征点法和直接方法。其中,特征点方法目前占据主流,能够在噪声较大、相机运动较快时工作,但地图则是稀疏特征点;直接方法不需要提特征,能够建立稠密地图,但存在着计算量大、鲁棒性不好的缺陷。
转载于 https://blog.csdn.net/weixin_37251044/article/details/79009385
特征点法
图像在计算机中是以灰度矩阵的形式存在的,但是由于灰度受光照的影响,并且当图像视角变化后,同一个物体的灰度值也会跟着变化。所以,就需要找出一种能够在相机进行移动和旋转(视角发生变化),仍然能够保持不变的特征,利用这些不变的特征来找出不同视角的图像中的同一个物体。
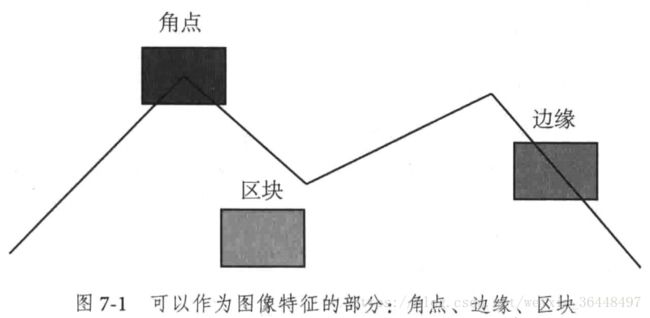
为了能够更好的进行图像匹配,需要在图像中选择具有代表性的区域,例如:图像中的角点、边缘和一些区块,但在图像识别出角点是最容易,也就是说角点的辨识度是最高的。所以,在很多的计算机视觉处理中,都是提取角点作为特征,对图像进行匹配,例如SFM,视觉SLAM等。
但是,单纯的角点并不能很好的满足我们的需求,例如:相机从远处得到的是角点,但是在近处就可能不是角点;或者,当相机旋转后,角点就发生了变化。为此,计算机视觉的研究者们设计了许多更为稳定的的特征点,这些特征点不会随着相机的移动,旋转或者光照的变化而变化。例如:SIFT,SURF,ORB等
- 常用的特征点算法,如SIFT,SURF,FAST,ORB等

特征点由关键点和描述子两部分组成(算法包括提取关键点并计算描述子)
一个图像的特征点由两部分构成:关键点(Keypoint)和描述子(Descriptor)。 关键点指的是该特征点在图像中的位置,有些还具有方向、尺度信息;描述子通常是一个向量,按照人为的设计的方式,描述关键点周围像素的信息。通常描述子是按照外观相似的特征应该有相似的描述子设计的。因此,在匹配的时候,只要两个特征点的描述子在向量空间的距离相近,就可以认为它们是同一个特征点。
特征点的匹配通常需要以下三个步骤:
- 提取图像中的关键点,这部分是查找图像中具有某些特征(不同的算法有不同的)的像素
- 根据得到的关键点位置,计算特征点的描述子
- 根据特征点的描述子,进行匹配
特征点描述子
从图像中提取到特征的关键点信息,通常只是其在图像的位置信息(有可能包含尺度和方向信息),仅仅利用这些信息无法很好的进行特征点的匹配,所以就需要更详细的信息,将特征区分开来,这就是特征描述子。另外,通过特征描述子可以消除视角的变化带来图像的尺度和方向的变化,能够更好的在图像间匹配。
特征的描述子通常是一个精心设计的向量,描述了关键点及其周围像素的信息。为了能够更好的匹配,一个好的描述子通常要具有以下特性:
- 不变性 指特征不会随着图像的放大缩小旋转而改变。
- 鲁棒性 对噪声、光照或者其他一些小的形变不敏感
- 可区分性 每一个特征描述子都是独特的,具有排他性,尽可能减少彼此间的相似性。
其中描述子的可区分性和其不变性是矛盾的,一个具有众多不变性的特征描述子,其区分局部图像内容的能力就比较稍弱;而如果一个很容易区分不同局部图像内容的特征描述子,其鲁棒性往往比较低。所以,在设计特征描述子的时候,就需要综合考虑这三个特性,找到三者之间的平衡。
特征描述子的不变性主要体现在两个方面:
- 尺度不变性 Scale Invarient
指的是同一个特征,在图像的不同的尺度空间保持不变。匹配在不同图像中的同一个特征点经常会有图像的尺度问题,不同尺度的图像中特征点的距离变得不同,物体的尺寸变得不同,而仅仅改变特征点的大小就有可能造成强度不匹配。如果描述子无法保证尺度不变性,那么同一个特征点在放大或者缩小的图像间,就不能很好的匹配。为了保持尺度的不变性,在计算特征点的描述子的时候,通常将图像变换到统一的尺度空间,再加上尺度因子。 - 旋转不变性 Rotation Invarient
指的是同一个特征,在成像视角旋转后,特征仍然能够保持不变。和尺度不变性类似,为了保持旋转不变性,在计算特征点描述子的时候,要加上关键点的方向信息。
为了有个更直观的理解,下面给出SIFT,SURF,BRIEF描述子计算方法对比
从上表可以看出,SIFT,SURF和BRIEF描述子都是一个向量,只是维度不同。其中,SIFT和SURF在构建特征描述子的时候,保存了特征的方向和尺度特征,这样其特征描述子就具有尺度和旋转不变性;而BRIEF描述子并没有尺度和方向特征,不具备尺度和旋转不变性。
常用的特征点算法
上面提到图像的特征点包含两个部分:
- 特征点的提取,在图像检测到特征点的位置
- 特征点的描述,也就是描述子。
在图像中提取到关键点的位置信息后,为了能够更有效的匹配(主要是保证尺度和旋转不变性),通常使用一个向量来描述关键点及其周围的信息。特征的描述子,在特征点的匹配中是非常重要的,上一小节中对其应该具有的性质做了介绍。但具体到一个算法来说,可能其既有特征点的提取算法也有特征点描述子的算法,也有可能其仅仅是一个特征点提取算法或者是特征点的描述子算法。在本小节就常用的特征点算法做一个简要的说明。
SIFT
提到特征点算法,首先就是大名鼎鼎的SIFT算法了。SIFT的全称是Scale Invariant Feature Transform,尺度不变特征变换,2004年由加拿大教授David G.Lowe提出的。SIFT特征对旋转、尺度缩放、亮度变化等保持不变性,是一种非常稳定的局部特征。
SIFT算法主要有以下几个步骤:
- 高斯差分金字塔的构建
使用组和层的结构构建了一个具有线性关系的金字塔(尺度空间),这样可以在连续的高斯核尺度上查找图像的特征点;另外,它使用一阶的高斯差分来近似高斯的拉普拉斯核,大大的减少了运算量。 - 尺度空间的极值检测及特征点的定位
搜索上一步建立的高斯尺度空间,通过高斯差分来识别潜在的对尺度和旋转不变的特征点。但是,在离散空间中,局部极值点可能并不是真正意义的极值点,真正的极值点有可能落在离散点的间隙中,SIFT通过尺度空间DoG函数进行曲线拟合寻找极值点。 - 特征方向赋值
基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向,后续的所有操作都是对于关键点的方向、尺度和位置进行变换,从而提供这些特征的不变性。 - 特征描述子的生成
通过上面的步骤已经找到的SIFT特征点的位置、方向、尺度信息,最后使用一组向量来描述特征点及其周围邻域像素的信息。
SIFT算法中及包含了特征点的提取算法,也有如何生成描述子的算法,更进一步的SIFT算法介绍可参看SIFT特征详解
SURF
SURF全称 Speeded Up Robust Features,是在SIFT算法的基础上提出的,主要针对SIFT算法运算速度慢,计算量大的缺点进行了改进。
SURF的流程和SIFT比较类似,这些改进体现在以下几个方面:
- 特征点检测是基于Hessian矩阵,依据Hessian矩阵行列式的极值来定位特征点的位置。并且将Hession特征计算与高斯平滑结合在一起,两个操作通过近似处理得到一个核模板。
- 在构建尺度空间时,使用box filter与源图像卷积,而不是使用DoG算子。
- SURF使用一阶Haar小波在x、y两个方向的响应作为构建特征向量的分布信息。
FAST特征点提取算法
SIFT和SURF是非常好的,稳定的特征点算法,但运算速度是其一大弊端,无法做到实时的特征提取和匹配,其应用就有了很大的局限性。FAST特征提取算法弥补了这一局限,检测局部像素灰度变化明显的地方,以速度快而著称,其全称为:Features From Accelerated Segment Test。在FAST算法的思想很简单:如果一个像素与周围邻域的像素差别较大(过亮或者过暗),那么可以认为该像素是一个角点。和其他的特征点提取算法相比,FAST算法只需要比较像素和其邻域像素的灰度值大小,十分便捷。
FAST算法提取角点的步骤:
- 在图像中选择像素p,假设其灰度值为:IpIp
- 设置一个阈值T,例如:IpIp的20%
- 选择p周围半径为3的圆上的16个像素,作为比较像素
- 假设选取的圆上有连续的N个像素大于Ip+TIp+T或者Ip−TIp−T,那么可以认为像素p就是一个特征点。(N通常取12,即为FAST-12;常用的还有FAST-9,FAST-11)。
FAST算法只检测像素的灰度值,其运算速度极快,同时不可避免的也有一些缺点
- 检测到的特征点过多并且会出现“扎堆”的现象。这可以在第一遍检测完成后,使用非最大值抑制(Non-maximal suppression),在一定区域内仅保留响应极大值的角点,避免角点集中的情况。
- FAST提取到的角点没有方向和尺度信息
上面的介绍的SIFT和SURF算法都包含有各自的特征点描述子的计算方法,而FAST不包含特征点描述子的计算,仅仅只有特征点的提取方法,这就需要一个特征点描述方法来描述FAST提取到的特征点,以方便特征点的匹配。下面介绍一个专门的特征点描述子的计算算法。
BRIEF描述子
BRIEF是一种二进制的描述子,其描述向量是0和1表示的二进制串。0和1表示特征点邻域内两个像素(p和q)灰度值的大小:如果p比q大则选择1,反正就取0。在特征点的周围选择128对这样的p和q的像素对,就得到了128维由0,1组成的向量。那么p和q的像素对是怎么选择的呢?通常都是按照某种概率来随机的挑选像素对的位置。
BRIEF使用随机选点的比较,速度很快,而且使用二进制串表示最终生成的描述子向量,在存储以及用于匹配的比较时都是非常方便的,其和FAST的搭配起来可以组成非常快速的特征点提取和描述算法。
ORB算法:FAST角点提取+BRIEF描述子
ORB的全称是Oriented FAST and Rotated BRIEF,是目前来说非常好的能够进行的实时的图像特征提取和描述的算法,它改进了FAST特征提取算法,并使用速度极快的二进制描述子BRIEF。
针对FAST特征提取的算法的一些确定,ORB也做了相应的改进。
- 使用非最大值抑制,在一定区域内仅仅保留响应极大值的角点,避免FAST提取到的角点过于集中。
- FAST提取到的角点数量过多且不是很稳定,ORB中可以指定需要提取到的角点的数量N,然后对FAST提取到的角点分别计算Harris响应值,选择前N个具有最大响应值的角点作为最终提取到的特征点集合。
- FAST提取到的角点不具有尺度信息,在ORB中使用图像金字塔,并且在每一层金字塔上检测角点,以此来保持尺度的不变性。
- FAST提取到的角点不具有方向信息,在ORB中使用灰度质心法(Intensity Centroid)来保持特征的旋转不变性。
特征点匹配
特征匹配解决了SLAM中的数据关联问题,即确定当前看到的路标和之前看到的路标之间的对应关系。
最简单的特征匹配方法就是暴力匹配(Brute-Force Matcher),即对每一个特征点与所有的特征点测量描述子的距离,然后排序,取最近的一个作为匹配点。描述子的距离表述了两个特征之间的相似程度。
然而,当特征点很多的时,暴力匹配的运算量就变得很大,特别是我们想匹配一个帧和一张地图的时候。这不符合我们在SLAM中的实时性需求。此时快速近似最近邻算法(FLANN)更加适合于匹配点数量极多的情况。
OpenCV3中特征点的提取和匹配
OpenCV中封装了常用的特征点算法(如SIFT,SURF,ORB等),提供了统一的接口,便于调用。 下面代码是OpenCV中使用其feature 2D 模块的示例代码
Mat img1 = imread("F:\\image\\1.png");
Mat img2 = imread("F:\\image\\2.png");
// 1. 初始化
vector keypoints1, keypoints2;
Mat descriptors1, descriptors2;
Ptr orb = ORB::create();
// 2. 提取特征点
orb->detect(img1, keypoints1);
orb->detect(img2, keypoints2);
// 3. 计算特征描述符
orb->compute(img1, keypoints1, descriptors1);
orb->compute(img2, keypoints2, descriptors2);
// 4. 对两幅图像的BRIEF描述符进行匹配,使用BFMatch,Hamming距离作为参考
vector matches;
BFMatcher bfMatcher(NORM_HAMMING);
bfMatcher.match(descriptors1, descriptors2, matches); - 获取检测器的实例
在OpenCV3中重新的封装了特征提取的接口,可统一的使用Ptr来得到特征提取器的一个实例,所有的参数都提供了默认值,也可以根据具体的需要传入相应的参数。detector = FeatureDetector::create() - 在得到特征检测器的实例后,可调用的
detect方法检测图像中的特征点的具体位置,检测的结果保存在vector向量中。 - 有了特征点的位置后,调用
compute方法来计算特征点的描述子,描述子通常是一个向量,保存在Mat中。 - 得到了描述子后,可调用匹配算法进行特征点的匹配。上面代码中,使用了opencv中封装后的暴力匹配算法
BFMatcher,该算法在向量空间中,将特征点的描述子一一比较,选择距离(上面代码中使用的是Hamming距离)较小的一对作为匹配点。
上面代码匹配后的结果如下: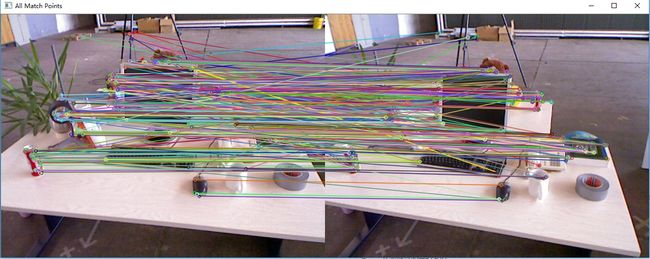
特征点的匹配后的优化
特征的匹配是针对特征描述子的进行的,上面提到特征描述子通常是一个向量,两个特征描述子的之间的距离可以反应出其相似的程度,也就是这两个特征点是不是同一个。根据描述子的不同,可以选择不同的距离度量。如果是浮点类型的描述子,可以使用其欧式距离;对于二进制的描述子(BRIEF)可以使用其汉明距离(两个不同二进制之间的汉明距离指的是两个二进制串不同位的个数)。
有了计算描述子相似度的方法,那么在特征点的集合中如何寻找和其最相似的特征点,这就是特征点的匹配了。最简单直观的方法就是上面使用的:暴力匹配方法(Brute-Froce Matcher),计算某一个特征点描述子与其他所有特征点描述子之间的距离,然后将得到的距离进行排序,取距离最近的一个作为匹配点。这种方法简单粗暴,其结果也是显而易见的,通过上面的匹配结果,也可以看出有大量的错误匹配,这就需要使用一些机制来过滤掉错误的匹配。
- 汉明距离小于最小距离的两倍
选择已经匹配的点对的汉明距离小于最小距离的两倍作为判断依据,如果小于该值则认为是一个错误的匹配,过滤掉;大于该值则认为是一个正确的匹配。其实现代码也很简单,如下:
// 匹配对筛选
double min_dist = 1000, max_dist = 0;
// 找出所有匹配之间的最大值和最小值
for (int i = 0; i < descriptors1.rows; i++)
{
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
// 当描述子之间的匹配大于2倍的最小距离时,即认为该匹配是一个错误的匹配。
// 但有时描述子之间的最小距离非常小,可以设置一个经验值作为下限
vector good_matches;
for (int i = 0; i < descriptors1.rows; i++)
{
if (matches[i].distance <= max(2 * min_dist, 30.0))
good_matches.push_back(matches[i]);
} 结果如下: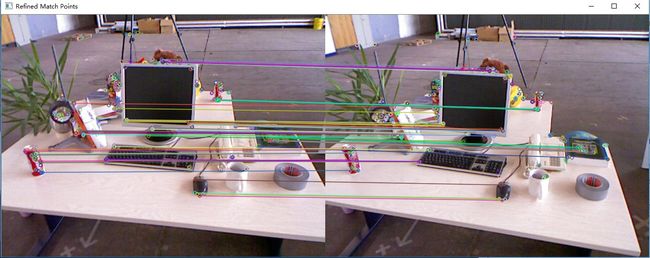
对比只是用暴力匹配的方法,进行过滤后的匹配效果好了很多。
-
交叉匹配
针对暴力匹配,可以使用交叉匹配的方法来过滤错误的匹配。交叉过滤的是想很简单,再进行一次匹配,反过来使用被匹配到的点进行匹配,如果匹配到的仍然是第一次匹配的点的话,就认为这是一个正确的匹配。举例来说就是,假如第一次特征点A使用暴力匹配的方法,匹配到的特征点是特征点B;反过来,使用特征点B进行匹配,如果匹配到的仍然是特征点A,则就认为这是一个正确的匹配,否则就是一个错误的匹配。OpenCV中BFMatcher已经封装了该方法,创建BFMatcher的实例时,第二个参数传入true即可,BFMatcher bfMatcher(NORM_HAMMING,true)。 - KNN匹配
K近邻匹配,在匹配的时候选择K个和特征点最相似的点,如果这K个点之间的区别足够大,则选择最相似的那个点作为匹配点,通常选择K = 2,也就是最近邻匹配。对每个匹配返回两个最近邻的匹配,如果第一匹配和第二匹配距离比率足够大(向量距离足够远),则认为这是一个正确的匹配,比率的阈值通常在2左右。
OpenCV中的匹配器中封装了该方法,上面的代码可以调用bfMatcher->knnMatch(descriptors1, descriptors2, knnMatches, 2);具体实现的代码如下:
const float minRatio = 1.f / 1.5f;
const int k = 2;
vector> knnMatches;
matcher->knnMatch(leftPattern->descriptors, rightPattern->descriptors, knnMatches, k);
for (size_t i = 0; i < knnMatches.size(); i++) {
const DMatch& bestMatch = knnMatches[i][0];
const DMatch& betterMatch = knnMatches[i][1];
float distanceRatio = bestMatch.distance / betterMatch.distance;
if (distanceRatio < minRatio)
matches.push_back(bestMatch);
}const float minRatio = 1.f / 1.5f;
const int k = 2;
vector> knnMatches;
matcher->knnMatch(leftPattern->descriptors, rightPattern->descriptors, knnMatches, 2);
for (size_t i = 0; i < knnMatches.size(); i++) {
const DMatch& bestMatch = knnMatches[i][0];
const DMatch& betterMatch = knnMatches[i][1];
float distanceRatio = bestMatch.distance / betterMatch.distance;
if (distanceRatio < minRatio)
matches.push_back(bestMatch);
} 将不满足的最近邻的匹配之间距离比率大于设定的阈值(1/1.5)匹配剔除。
- RANSAC
另外还可采用随机采样一致性(RANSAC)来过滤掉错误的匹配,该方法利用匹配点计算两个图像之间单应矩阵,然后利用重投影误差来判定某一个匹配是不是正确的匹配。OpenCV中封装了求解单应矩阵的方法findHomography,可以为该方法设定一个重投影误差的阈值,可以得到一个向量mask来指定那些是符合该重投影误差的匹配点对,以此来剔除错误的匹配,代码如下:
const int minNumbermatchesAllowed = 8;
if (matches.size() < minNumbermatchesAllowed)
return;
//Prepare data for findHomography
vector srcPoints(matches.size());
vector dstPoints(matches.size());
for (size_t i = 0; i < matches.size(); i++) {
srcPoints[i] = rightPattern->keypoints[matches[i].trainIdx].pt;
dstPoints[i] = leftPattern->keypoints[matches[i].queryIdx].pt;
}
//find homography matrix and get inliers mask
vector inliersMask(srcPoints.size());
homography = findHomography(srcPoints, dstPoints, CV_FM_RANSAC, reprojectionThreshold, inliersMask);
vector inliers;
for (size_t i = 0; i < inliersMask.size(); i++){
if (inliersMask[i])
inliers.push_back(matches[i]);
}
matches.swap(inliers);const int minNumbermatchesAllowed = 8;
if (matches.size() < minNumbermatchesAllowed)
return;
//Prepare data for findHomography
vector srcPoints(matches.size());
vector dstPoints(matches.size());
for (size_t i = 0; i < matches.size(); i++) {
srcPoints[i] = rightPattern->keypoints[matches[i].trainIdx].pt;
dstPoints[i] = leftPattern->keypoints[matches[i].queryIdx].pt;
}
//find homography matrix and get inliers mask
vector inliersMask(srcPoints.size());
homography = findHomography(srcPoints, dstPoints, CV_FM_RANSAC, reprojectionThreshold, inliersMask);
vector inliers;
for (size_t i = 0; i < inliersMask.size(); i++){
if (inliersMask[i])
inliers.push_back(matches[i]);
}
matches.swap(inliers);