ORB-SLAM个人总结
ORB-SLAM
此文为个人总结,仅供参考,欢迎批评指正。
本文部分内容来自:泡泡机器人。
Covisilibilty Graph 的顶点是相机的Pose,而边是Pose-Pose的变换关系——所以也算是Pose Graph 一种吧。当两个相机看到相似的空间点时,它们对应的Pose就会产生联系(我们就可以根据这些空间点在照片上的投影计算两个相机间的运动)。根据观测到的空间点的数量,给这个边加上一个权值,度量这个边的可信程度。
Essential Graph 比Covisibility Graph更为简单,ORB-SLAM主要用它来进行全局优化。为了限制优化的规模,ORB-SLAM试图尽量减少优化边的数量。而尽量减少边,又保持连通性的方法,就是做一个最小生成树。
baseline:两个关键帧之间的位移
金字`:为提高效率,判断特征点位置在哪层上面(他就是把相机的视锥分成了八层,比例为1.2,对每个特征点计算它的距离判断在哪层)
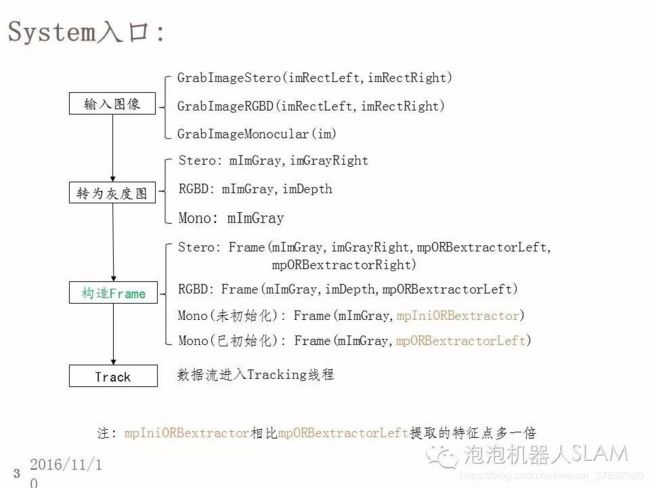
代码结构:
// 程序中变量名的第一个字母如果为"m"则表示为类中的成员变量,member
// 第一个、第二个字母:
// "p"表示指针数据类型
// "n"表示int类型
// "b"表示bool类型
// "s"表示set类型
// "v"表示vector数据类型
// 'l'表示list数据类型
// "KF"表示KeyPoint数据类型
// "Cov"表示协方差
// "Th"表示阈值
// "Prior"表示先验
// "sigma"表示随机变量的标准差(因此在算协方差时用sigma2)


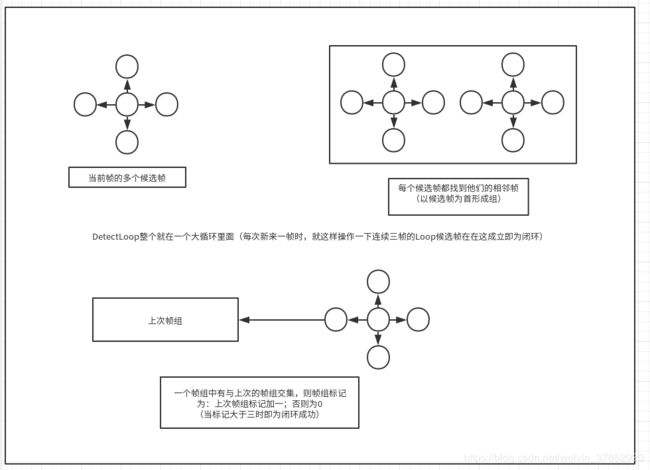
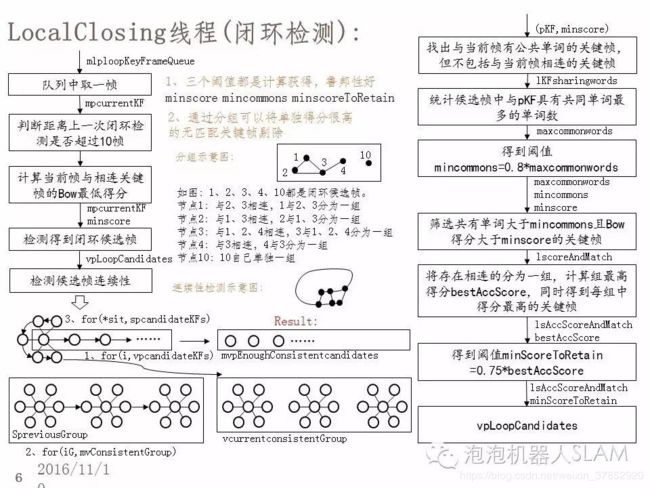 此处有一个连通性检测对每一个候选帧计算他的相邻帧集合,和当前帧的相邻帧比较,如果三帧以上一致则认为是闭环:
此处有一个连通性检测对每一个候选帧计算他的相邻帧集合,和当前帧的相邻帧比较,如果三帧以上一致则认为是闭环:

MapPoint的操作:
初始化阶段(Tracking内):
vector<Match> mvMatches12; ///< Match的数据结构是pair,mvMatches12只记录Reference到Current匹配上的特征点对(它由mvIniMaches筛选得到)在初始化时使用,生成3D点并和特征点匹配CheckRT实现最后存入Tracking的mvIniP3D中。
mvIniP3D的点转化成MapPoint类型存入KeyFream中的mvpMapPoint算是特征点。
mspMapPoint是存在Map中的对应的特征点。
Local Mapping线程可能会将关键帧中某些MapPoints进行替换,由于tracking中需要用到mLastFrame,这里检查并更新上一帧中被替换的MapPoints(在mpReplaced中存储)
TrackReferenceKeyFrame中mCurrentFrame.mvpMapPoints被赋值成当前真和关键真相匹配的特征点
HISTO_LENGTH:用于记录统计直方图
SearchByProjection:将上一真的特征点对应的3D点对应到当前真
mvpLocalMapPoints:存储mvpLocalKeyFrames对应的所有MapPoints
SearchByProjection:将mvpLocalMapPoints投影到当前真(所有3D特征点投影到真中一定是与真中的ORB特征点相对应)
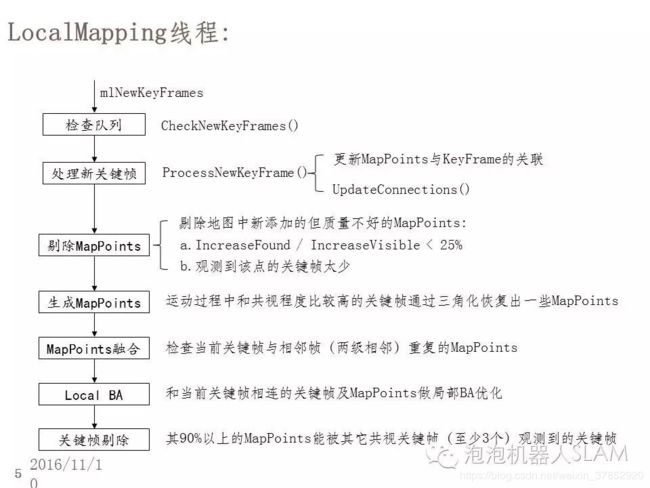
LocalMaping内
ProcessNewKeyFrame:将双目或RGBD跟踪过程中新插入的MapPoints放入mlpRecentAddedMapPoints,等待检查
MapPointCulling:对mlpRecentAddedMapPints进行剔除
CreateNewMapPoints:通过SearchForTriangulation找到对应的2D对应点(没有3D点的),然后各种检测通过收生成新的MapPoint。唯一向map中添加点的方法
SearchInNeighbors:检查并融合当前关键帧与相邻帧(两级相邻)重复的MapPoint
LoopClosing内
mvpLoopMapPoints存储vpLoopConnectedKFs(由闭环帧和他的相邻帧组成)中所有的MapPoint通过sim3和当前帧中的进行匹配
CorrectLoop:通过sim3计算矫正后点的位置
mvpCurrentMatchedPoints:LoopClosing中的变量用于存储sim3检测出来的MapPoints,用于SwarchFuse中检测当前帧MapPoints与匹配的MapPoints是否冲突
向Map中添加KeyFrame只有在初始化和LocalMapping的ProcessNewKeyFrame可以
KeyFrame的操作:
初始化阶段(Tracking内):
CreateInitialMapMonocular: 将初始化的帧添加到map中。在此!!!将MapPoints的中值深度归一化到1,并归一化两帧之间变换。将前两帧存入mpLocalMapper中。并且存入自己的mvpLocalKeyFrames中。
LocalKeyFrames: 策略1:能观测到当前帧MapPoints的关键帧作为局部关键帧;策略2:与策略1得到的局部关键帧共视程度很高的关键帧作为局部关键帧;步骤3:更新当前帧的参考关键帧,与自己共视程度最高的关键帧作为参考关键帧
***CreateNewKeyFrame:***添加关键帧。并插入mpLocalMapper中。
LocalMaping内
***ProcessNewKeyFrame:***将关键帧放入map
***KeyFrameCulling:***剔除关键帧。Covisibility Graph中的关键帧,其90%以上的MapPoints能被其他关键帧(至少3个)观测到,则认为该关键帧为冗余关键帧。
LoopClosing
优化
lobalBundleAdjustemnt :对所有map中的点和帧进行优化。在Track()调用。
// 3D-2D 最小化重投影 e = (u,v) - project(Tcw*Pw)
// 1. Vertex: g2o::VertexSE3Expmap(),即当前帧的Tcw
g2o::VertexSBAPointXYZ(),MapPoint的mWorldPos
// 2. Edge:
// - g2o::EdgeSE3ProjectXYZ(),BaseBinaryEdge
// + Vertex:待优化当前帧的Tcw
// + Vertex:待优化MapPoint的mWorldPos
// + measurement:MapPoint在当前帧中的二维位置(u,v)
// + InfoMatrix: invSigma2(与特征点所在的尺度有关)
//
//@param vpKFs 关键帧
// vpMP MapPoints
// nIterations 迭代次数(20次)
// pbStopFlag 是否强制暂停
// nLoopKF 关键帧的个数
// bRobust 是否使用核函数
PoseOptimization: 对每一个帧都执行一次
// 1. Vertex: g2o::VertexSE3Expmap(),即当前帧的Tcw
// 2. Edge:
//- g2o::EdgeSE3ProjectXYZOnlyPose(),BaseUnaryEdge
// + Vertex:待优化当前帧的Tcw
// + measurement:MapPoint在当前帧中的二维位置(u,v)
// + InfoMatrix: invSigma2(与特征点所在的尺度有关)
//- g2o::EdgeStereoSE3ProjectXYZOnlyPose(),BaseUnaryEdge
// + Vertex:待优化当前帧的Tcw
// + measurement:MapPoint在当前帧中的二维位置(ul,v,ur)
// + InfoMatrix: invSigma2(与特征点所在的尺度有关)
LocalBundleAdjustment: 只在LocalMapping中调用:已经处理完队列中的最后的一个关键帧,并且闭环检测没有请求停止LocalMapping
//1. Vertex:
// - g2o::VertexSE3Expmap(),LocalKeyFrames,即当前关键帧的位姿、与当前关键帧相连的关键帧的位姿
// - g2o::VertexSE3Expmap(),FixedCameras,即能观测到LocalMapPoints的关键帧(并且不属于LocalKeyFrames)的位姿,在优化中这些关键帧的位姿不变
// - g2o::VertexSBAPointXYZ(),LocalMapPoints,即LocalKeyFrames能观测到的所有MapPoints的位置
//2. Edge:
// - g2o::EdgeSE3ProjectXYZ(),BaseBinaryEdge
// + Vertex:关键帧的Tcw,MapPoint的Pw
// + measurement:MapPoint在关键帧中的二维位置(u,v)
// + InfoMatrix: invSigma2(与特征点所在的尺度有关)
// - g2o::EdgeStereoSE3ProjectXYZ(),BaseBinaryEdge
// + Vertex:关键帧的Tcw,MapPoint的Pw
// + measurement:MapPoint在关键帧中的二维位置(ul,v,ur)
// + InfoMatrix: invSigma2(与特征点所在的尺度有关)
IMU部分
IMUData
Frame:mvIMUDataSinceLastFrame
在读入图片时根据IMU时间戳分配到每一帧。
KeyFrame:mvIMUData
创建关键帧时Tracking:mvIMUSinceLastKF拿过来就用。
Tracking:mvIMUSinceLastKF
每次来新帧就把他的mvIMUDataSinceLastFrame加进来。
IMUPreInt
KeyFrame:mIMUPreInt
KeyFrame:mvIMUData积分得来。
Frame
没有(Frame只在Tracking阶段使用,之后全是KeyFrame的事)
Tracking:mIMUPreIntInTrack
Tracking:mvIMUSinceLastKF积分得到
NavState
Frame:mNavState
TrackWithIMU时通过上一帧位姿以及IMU预计分信息初始,再通过PoseOptimization进行优化。
KeyFrame:mNavState
KeyFrame初始化时frame传过来,之后全局优化时不断更新。