每日笔记
1月10日
贪心算法
- 左值右值的概念:
- 贪心算法概念
- 指针指向的含义
指针指向
int *p, calendar[12][13];
单片机
流水灯要注意的问题
- ! ~
- 位运算<<要直接接触二进制
- 锁存器锁存!是利用P2=0x00,这样p0的数据(电平变化无法传到)led那边
- 第三点对蜂鸣器也是用
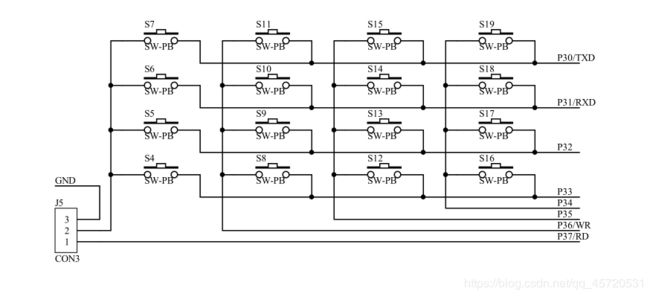
矩阵按键注意事项
1.先说独立按键,有独立按键三步
unsigned char Trg;
unsigned char Cont;
#define KEYPORT P3
void Key_Read( void )
{
unsigned char ReadData = KEYPORT^0xff;
Trg = ReadData & (ReadData ^ Cont);
Cont = ReadData;
}
while(1)
{ //三行独立按键的实验
Key_Read();
if(Trg & 0x08)//S4
{
P2=0xa0;buzzer=1;P2=0x00;
}
if(Trg & 0x04)//S5
{
P2=0xa0;buzzer=0;P2=0x00;
}
}
trg可以检测单次的
cont可以检测一直的按键
2!!!qiao 重点!
独立按键三行
unsigned char ReadData = KEYPORT^0xff;
Trg = ReadData & (ReadData ^ Cont);
Cont = ReadData;
所以按键功能处理程序不会重复执行,省下了一大堆的条件判断,这个可是精粹哦!!Cont代表的是长按键,如果PB0按着不放,那么Cont的值就为 0x01,相对应,PB7按着不放,那么Cont的值应该为0x80,同样很好理解。
#include解释
1)参数方程中状态不能函数结束就被释放,因而要用static
2)switch检测三种状态时
state=0 检测是否有按键按下,如果没有,则break进行下一次循环
state=1 检测按键是否抖动,检测出对应的按键后,并不着急输出,而是进行下一次的case 2,检验此时是否按键仍然按下,若检测出就是抖动,break重来,如果确实没有抖动!恭喜,这个switch函数圆满结束,输出 state值
然后主函数就可以使用它来对应按键对应功能了。
数码管结合按键啦
#include1)下面这个代码用delay实现动态扫描
#include2)这个用定时器实现动态扫描
#includeDS1820温度
#include "reg52.h"
#include我吐了,就是不对!!!!哪天对了一定要过来写笔记!
二进制逻辑算法:
与.
或+,v
非
异或
原码补码反码
https://www.imooc.com/article/16813?block_id=tuijian_wz //原作者保留权利
1.反码可以计算出一个整数加一个负数