【立体视觉(一)】由基本矩阵、本质矩阵恢复摄像机矩阵——Structure from motion
最近在研究立体视觉,已经有一些日子了。相关理论对数学要求有点高,看了很久才有了一些系统的了解,并做了一些实验帮助理解。
本文会介绍Structure from motion中,利用两视图恢复相机位姿的内容,这也是三维重建的基础。
本文主要基于《Multiple View Geometry in Computer Vision(计算机视觉中的多视图几何)》这本书来梳理算法流程,有部分推导过程没有给出,读者可自行查阅
刚开始写微博,经验很少,不足之处,还请各位指导,如有错误,恳请指正。希望能向大家多多学习,共同研究和进步。
----------------------------------------------------------------------------------------------------------------------------------------------------------
条件:已获取相机在两不同位置拍摄的图像,没有空间标定物,可以不进行摄像机的标定;
目标:求出相机在3D空间中的摄像机矩阵,以便用于三维重构;
缺陷:在上述条件下,获得的摄像机矩阵与实际相差一个射影变换。
0、基础知识和参数
射影变换和单应性矩阵:
射影变换过程中不变的性质有共点、共线、相交等,单应性矩阵H可以用来表示射影变换,并且通过H矩阵联系起来的对应点是唯一的。
摄像机矩阵P:
摄像机矩阵由内参数矩阵K和外参数矩阵[R|t]组成,简单来说,P=K[R|t]。对于空间中的一个3D点X,其在图像上的投影为x=PX。
齐次坐标:
本文中用的都是齐次坐标,不懂的童鞋可以自行查阅齐次坐标的定义和性质。
1.对极几何
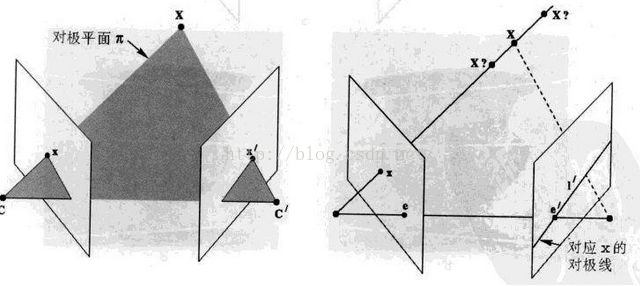
摄像机中心在C和C‘时分别采集两幅图像,如图(a),空间中的一点X在平面上的投影x和x',即为空间点X与摄像机中心c和c'连线和成像平面的交点。
图(b)中展示了成像过程中的数学关系。其中,摄像机中心的连线与成像平面的交点e和e'为对极点(也是摄像机中心在另一平面上的投影)。若已知左图的摄像机中心C、成像点x,则可以确定C,x,X三点所在的直线,该直线在右侧成像面的投影I’即为x对应的对极线。显然,X在右侧平面的投影x'在此对极线I‘上。
2.基本矩阵
(1)几何推导
由上图的投影关系我们可以知道,对于空间中任意一点X,在两平面中分别有唯一的点x和x'与其对应,换句话说,这两个平面点是射影等价的。因此可以找到一个单应矩阵H,使得
x'=Hx(根据射影变换的性质)
而在右图中,由对极点e'和成像点x',可以表示出对极线
I’=e'×x'(根据其次坐标的性质)
这样,I‘=e'×Hx
我们可以令基本矩阵
F=e'×H,即I‘=Fx
上式给出了基本矩阵F的定义,但是这又有什么用呢?直观上我们能感觉到,F可以表征左右两幅图的位置关系,但是仅仅使用上述的定义,并不能很好地确定这样的关系,因此,可以通过下面的代数推导来帮助理解
(2)代数推导
假设两幅图像的摄像机矩阵分别为P,P',且P的伪逆矩阵为P^,因为摄像机矩阵中的外参数可以用来表征相机的空间位姿,所以,如果能求出F和P的关系,就能利用F来恢复相机位姿。
我们已知左图摄像机中心C,和成像点X=P^x(由x=PX得到)
则x'=P'X=P'P^x
另外,空间中的摄像机中心C在右图中的投影即为对极点e',因此
e'=P'C
由(1)中几何推导可知
I’=e'×x'=e'×(P'P^x)=(P'C)×(P'P^x)=Fx
根据几何推导中的定义,可以得出F=e'×(P'P^)
当然,上述定义中,我们已经可以发现,F与两摄像机矩阵有关,几何推导中的单应矩阵H也可以用(P'P^)来表示,但是我们仍然需要更为定量的描述,因为P中还有内参数的K影响,我们希望将这部分的影响分离出来,而确定F和R,t的关系。
因为我们的目标是求解两幅图在三维空间中的相对位置关系,因此这里我们假设C即为世界坐标系的原点且其所在的坐标系为世界坐标系,则可以描述为
P=K[I|0] P'=K'[R|t]
P^=(K-1 0T)T
两摄像机的中心分别为 (0 1)T和(-RTt 1)T,这是用齐次坐标表示的点。
则由中心点和摄像机矩阵可以分别确定两个对极点e,e'
e=P(-RTt 1)T=KRTt
e’=P’(0 1)T=K’t
则F=e'×(P'P^)=e'×K'RK-1=(K’t)×K'RK-1
这里需要用到参考资料中的结论A3.3,感兴趣的同学可以去研究其推导过程
由A3.3我们可以得到F=(K’t)×K'RK-1=K’-Tt×RK-1
到这里,我们已经可以发现,在已知内参数的情况下,是可以直接得到F和R,t的关系的。具体做法可以通过由本质矩阵的特性进行恢复。
另外,由于x'一定在极线I‘=Fx上,因此,根据齐次坐标的性质,x'TFx=0。因此,在得到了两幅图像的对应点后,可以根据算法来求出F,具体解法较多,这里暂不研究。
3.由基本矩阵恢复摄像机矩阵
根据对极点的性质,e’TF=0且Fe=0(e,e'为左右两个极点)
参考文献中给出了已知基础矩阵时,摄像机矩阵的表示(具体推导可自行翻阅)
P=[I|0]和P’=[e’ ×F|e’]
其中,e’是满足e’F=0的对极点。
4.摄像机射影多义性
了解到上述内容后,我们似乎已经能够求出摄像机矩阵P,但是我们开始就已经说过,类似的恢复与实际情况相差一个射影变换,那主要问题是出在哪里呢?
回到2.(2)中对于基本矩阵的代数推导
该过程中,我们是由摄像机矩阵P,P‘去推导基本矩阵F,并发现一对摄像机矩阵唯一确定一个F,但是反过来却不成立。
设H为表示3维射影变换的矩阵
对于平面上的点x=PX=(PH)(H-1X),P’也存在类似关系
则对于空间中的一点H-1X,x和x'为其对应的成像点,同时PH和P‘H为其对应的摄像机矩阵。
也就是说(P,P’)和(PH,P'H)对应的基础矩阵是相同的。
同时,参考文献中还给出结论,在相差右乘一个射影变换H时,给定基本矩阵F,能唯一确定一对摄像机矩阵,且这种情况是唯一的。(换句话说,由F确定的P和P‘与实际相差一个射影变换H,即Pr=PH,Pr'=P'H)
这样,利用上述方法恢复出的摄像机矩阵,与实际的摄像机矩阵一般都会相差一个射影变换
本质矩阵可以认为是在归一化摄像机矩阵(内参数矩阵认为都是一样的)的情况下得到的基本矩阵。
这里只要知道,本质矩阵E= t×R
则很容易得到基本矩阵和本质矩阵的关系
E=K’TFK
因此在求出基本矩阵F和已知内参数矩阵的情况下,可以轻松得到本质矩阵E
这里需要指出的是,本质矩阵没有内参数的作用,他比基本矩阵多了一些性质,从而能够完成下面部分中介绍的过程。因为是在归一化坐标系下的表示,所以E可以看作是对物理坐标的操作(不理解的话,可以只认为两者相差内参数K的关系),而F是对图像坐标的操作。
由于去除了内参数的作用,因此利用本质矩阵的分解,可以得到与真实值相差一个尺度的相机外参(而不是相差一个射影变换)。具体求解过程如下。
6.由本质矩阵恢复摄像机摄像机外参数
这一部分则是应用了本质矩阵的性质以及一些数学推导了,下面只给出结论,具体推导过程可以查阅本文的参考资料。
E= t×R并且我们希望能够得到其等价E=SR,从而用S去表征t
根据参考文献中的结论,若E的SVD分解为Udiag(1,1,0)VT,则E=SR可以有下面两种表示
S=UZUT R=UWVT或者UWTVT
同时文献中也证明了不存在其他的表示了。
通过证明,得t=u3=U(0,0,1)T
这里,为了求出摄像机矩阵,还有一个问题:
文献中指出,在上述SVD分解下,并且令第一个相机的坐标系为世界坐标系,则第二个摄像机矩阵有四种可能的情况;
![]()
其分别对应的几何解释为
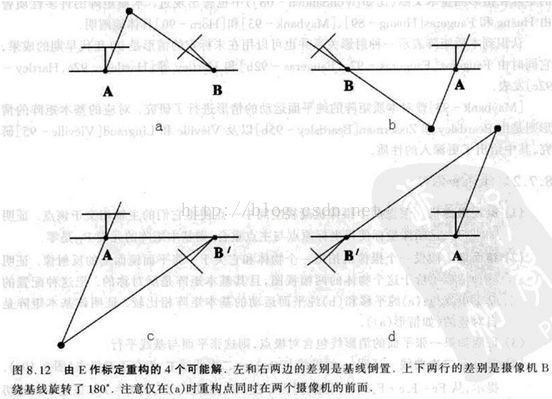
也就是说,为了确定正确的摄像机矩阵,我们需要找到一个点,验证其是否是在两个摄像机的前边,就能排除其他三个解。
7.总结
这里,我们进行摄像机矩阵恢复的步骤为:
找到图像中的对应点(特征点匹配)——计算基本矩阵F——计算摄像机矩阵
如果我们得到了摄像机的内参数,而只求解外参数,则可以利用
找到图像中的对应点(特征点匹配)——计算基本矩阵F——计算本质矩阵E——计算摄像机矩阵
本文主要讲解了基本矩阵、本质矩阵、对极几何的相关理论,以及如何利用这些条件去恢复摄像机矩阵。
这里,我们已经能够恢复出与实际相差一个射影变换的摄像机矩阵,接下来的任务,是如何利用这些条件,去获得三维重构。
在不知道内参数的情况下,我们的方法是,尽可能恢复该射影变换,当然最后的结果会与实际结果相差一个尺度因子,但是已经能够正确构建实际场景的模型。如果知道内参,则可以利用本质矩阵直接分解得到外参。
关于重构的内容,在接下来的学习中,我会继续将这部分更新。
参考文献《Multiple View Geometry in Computer Vision(计算机视觉中的多视图几何)》
最后更新于2015/8/31