数学优化与凸集2(斯坦福凸优化笔记2)
1 仿射和凸集
1 直线和线段
设 x1≠x2 为 Rn 空间中的两个点,那么具有下列形式的点
y=θx1+(1−θ)x2,θ∈R
组成一条穿越 x1 和 x2 的直线。如果 θ∈[0,1] ,就构成了 x1 和 x2 之间的闭线段。
2 仿射集合
如果通过集合 C⊆R 中任意两个不同点的直线仍在集合中,那么集合 C 是仿射的。
这个概念可以扩展到多个点的状况,如果 θ1+⋯+θk=1 ,我们称具有 θ1x1+⋯+θkxk 形式的点为 x1,⋯xk 的仿射组合。
根据仿射集合的定义,如果 C 是一个仿射集合, x1,⋯xk∈C ,且 θ1+⋯+θk=1 ,那么 θ1x1+⋯+θkxk 仍然在 C 中。
3 凸集
集合 C 被称为凸集,如果 C 中任意两点间的线段都在 C 中,即对于任意 x1,x2∈C 和满足 0≤θ≤1 的 θ 都有
θx1+(1−θ)x2∈C
简单的可以理解成,集合中任意两个点之间的路径都包含在集合里。
集合中所有点的凸组合的集合叫做凸包,记 conv C
conv C={θ1x1+⋯+θkxk∣xi∈C,θi≥0,i=1,⋯,k,θ1+⋯+θk=1}
凸包是包含 C 最小的凸集。

上图是凸包的图片(图片来自斯坦福Boyd Convex Optimization)
左图为一些点的凸包,右图为肾型的凸包。
4 锥
对于任意 x∈C 和 θ≥0 都有 θx∈C ,我们称集合 C 为锥或者非负齐次。
锥可以直观的理解为从原点到各个点的辐射的直线组成的集合。

上图的三条直线可以认为是锥,对于任意直线上点 x1,x2,x3 来说,满足上述锥的定义。
如果集合 C 是锥,并且是凸的,即对于任意 x1.x2∈C 和 θ1,θ2≥0 有:
θ1x1+θ2x2∈C
此时这个集合既是一个锥,又是凸的,称为凸锥。
在二维上,凸锥构成了二维的扇形。

(图片来自斯坦福Boyd Convex Optimization)
集合 C 的锥包是 C 中所有元素的锥组合的集合。即
{θ1x1+⋯+θkxk∣xi∈C,θi≥0,i=1,⋯,k},
这是包含 C 最小的凸锥。

(图片来自斯坦福Boyd Convex Optimization)
2 一些常见的凸集
下面介绍一些常用的凸集,这些凸集将在以后经常用到。
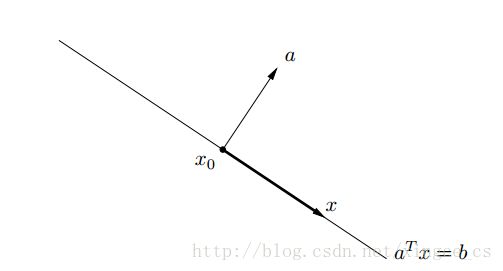
1超平面与半空间
超平面是有以下形式的集合:
{x∣aTx=b}
其中: a∈Rn,a≠0 且 b∈R 。
从几何上讲,我们可以理解为超平面法线方向为 a ,常数 b∈R 决定了超平面到原点的偏移。超平面将 Rn 划分成两个半空间。半空间是具有下列形式的集合:
{x∣aTx≤b}
超平面既是凸的,又是仿射的;
(图片来自斯坦福Boyd Convex Optimization)
半空间是凸的。

(图片来自斯坦福Boyd Convex Optimization)
2 Euclid 球和椭球
Rn 空间中的Euclid 球(简称球)形式如下:
B(xc,r)={x∣∥x−xc∥2≤r}={x∣(x−xc)T(x−xc)≤r2}
还可以表达为:
B(xc,r)={xc+ru∣∥u∥2≤1}
另一类相关的凸集是椭球:
ε={(x−xc)TP−1(x−xc)≤1}
椭球的另外一种常见的表示形式是:
ε={xc+Au∣∥u∥2≤1}
其中 A 是非奇异的方阵,我们一般假设 A 对称正定,且 A=P−1 ,这时此表示方式和上一种表示方式一致。
球和椭球都是凸的。
3 范数球和范数锥
范数球可以如下定义,设 ∥⋅∥ 是 Rn 中的范数,则范数球:
{x∣∥x−xc∥≤r}
范数球是上面Euclid球的推广,同样是凸的。
范数锥的定义如下:
C={(x,t)∣∥x∥≤t}⊆Rn+1
范数锥是个凸锥。

这个图是二维 {∥x∥max≤t} 的图片。

这个图是二维 {∥x∥1≤t} 的图片。
4 多面体
多面体定义为有限个线性等式和不等式的解集:
P={x∣aTjx≤bj,j=1,⋯,m, cTjx=dj,j=,⋯,p}
多面体是有限个半空间和超平面的交集。多面体是一个凸集。
多面体还可以表示为:
P={x∣Ax⪯b,Cx=d}
其中:
5 半正定锥
我们用 Sn 表示对称 n×n 矩阵的集合,这个集合是一个维数为n(n+1)/2的向量空间。我们用 Sn+ 表示对称半正定矩阵的集合
Sn+={X∈Sn∣X⪰0}
用 Sn++={X∈Sn∣X≻0} 表示对称正定矩阵的集合。 Sn+ 和 Sn++ 集合都是凸锥。
(未完,待续)