camera上电时序
今天有空去研究camera的上电时序,对了,如果你喜欢文学,历史,哲学,可以关注公众号:二校五叔
1.高通平台对于camera的代码组织,大体上还是遵循Android的框架:
即上层应用和HAL层交互,高通平台在HAL层里面实现自己的一套管理策略;
在kernel中实现sensor的底层驱动;
对于最核心的sensor端的底层设置、ISP效果相关等代码则是单独进行了抽离,放在vendor中。
2.vendor中:
\vendor\qcom\proprietary\mm-camera\mm-camera2\media-controller\modules\sensors\sensor_libs\ov5648_q5v22e
下面这个结构体便是上电时序
static struct msm_sensor_power_setting ov5648_q5v22e_power_setting[] = {
{
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_STANDBY,
.config_val = GPIO_OUT_LOW,
.delay = 2,
},
{
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_RESET,
.config_val = GPIO_OUT_LOW,
.delay = 2,
},
{
.seq_type = SENSOR_VREG,
.seq_val = CAM_VIO,
.config_val = 0,
.delay = 0,
},
{
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_VANA,
.config_val = GPIO_OUT_HIGH,
.delay = 1,
},
{
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_VDIG,
.config_val = GPIO_OUT_HIGH,
.delay = 5,
},
{
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_STANDBY,
.config_val = GPIO_OUT_HIGH,
.delay = 10,
},
{
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_RESET,
.config_val = GPIO_OUT_HIGH,
.delay = 5,
},
{
.seq_type = SENSOR_CLK,
.seq_val = SENSOR_CAM_MCLK,
.config_val = 23880000,//24000000,//19200000,//23880000,
.delay = 5,
},
{
.seq_type = SENSOR_I2C_MUX,
.seq_val = 0,
.config_val = 0,
.delay = 10,
},
};
它定义在下面的结构体中:
static struct msm_camera_sensor_slave_info sensor_slave_info = {
...
/* power up / down setting */
.power_setting_array = {
.power_setting = ov5648_q5v22e_power_setting,
.size = ARRAY_SIZE(ov5648_q5v22e_power_setting),
.power_down_setting = power_down_setting,
.size_down = ARRAY_SIZE(power_down_setting),
},
};
这些结构体具体在哪里定义呢?在kernel中
/include/media/msm_camsensor_sdk.h中
struct msm_camera_sensor_slave_info {
...
struct msm_sensor_power_setting_array power_setting_array;
...
};
struct msm_sensor_power_setting {
enum msm_sensor_power_seq_type_t seq_type;
uint16_t seq_val;
long config_val;
uint16_t delay;
void *data[10];
};
struct msm_sensor_power_setting_array {
struct msm_sensor_power_setting power_setting_a[MAX_POWER_CONFIG];
struct msm_sensor_power_setting *power_setting;
uint16_t size;
struct msm_sensor_power_setting power_down_setting_a[MAX_POWER_CONFIG];
struct msm_sensor_power_setting *power_down_setting;
uint16_t size_down;
};
3.从vendor中把时序结构体的内容传递到kernel中的过程如下:
在msm_sensor_init_subdev_ioctl(…,void *arg) —>函数: msm_sensor_driver_cmd(s_init, arg);
—>语句: struct sensor_init_cfg_data *cfg = (struct sensor_init_cfg_data *)arg;
—>函数:msm_sensor_driver_probe(cfg->cfg.setting,…);
—>语句:copy_from_user((void *)&setting32, setting,sizeof(setting32))将vendor的数据传送到内核空间
—>语句: slave_info->power_setting_array.size =setting32.power_setting_array.size;
slave_info->power_setting_array.power_setting =
compat_ptr(setting32.power_setting_array.power_setting); //把vendor的时序传递完毕
—>语句:rc = msm_sensor_get_power_settings(setting, slave_info,&s_ctrl->sensordata->power_info);
//把slave_info的上电时序传递给s_ctrl结构体
—>语句:msm_camera_fill_vreg_params(…)//校正时序中SENSOR_VREG的seq_val,为设备树的CAM_VIO
—>语句:rc = s_ctrl->func_tbl->sensor_power_up(s_ctrl); //真正执行上电时序
因为.sensor_power_up = msm_sensor_power_up,所以真正的上电函数为:msm_sensor_power_up(struct msm_sensor_ctrl_t *s_ctrl)
–>语句:power_info = &s_ctrl->sensordata->power_info; //把s_ctrl的上电信息传递给power_info
–>函数:msm_camera_power_up(power_info, s_ctrl->sensor_device_type,sensor_i2c_client);//上电
ps:vendor中的addr_type、camera_id、slave_addr等信息也是按照这样的方法从vendor中传递到kernel中的,可以加打印调试信息看这些值正确与否。
4.下面解析这个上电函数:
int msm_camera_power_up(struct msm_camera_power_ctrl_t *ctrl,
enum msm_camera_device_type_t device_type,
struct msm_camera_i2c_client *sensor_i2c_client)
{
struct msm_sensor_power_setting *power_setting = NULL;
...
rc = msm_camera_request_gpio_table( //申请gpio
ctrl->gpio_conf->cam_gpio_req_tbl,
ctrl->gpio_conf->cam_gpio_req_tbl_size, 1);
...
index = 0; index < ctrl->power_setting_size; index++) {
power_setting = &ctrl->power_setting[index]; //把时序的节点一个一个取下来解析
switch (power_setting->seq_type) { //判断类型
case SENSOR_CLK:
if (power_setting->config_val)
ctrl->clk_info[power_setting->seq_val].clk_rate = power_setting->config_val;
rc = msm_cam_clk_enable(...1); //camera频率使能
...
case SENSOR_GPIO:
...
gpio_set_value_cansleep(ctrl->gpio_conf->gpio_num_info->gpio_num[power_setting->seq_val],
(int) power_setting->config_val); //拉高拉低gpio口
...
case SENSOR_VREG:
if (power_setting->seq_val < ctrl->num_vreg)
msm_camera_config_single_vreg(...,1); //函数里面打开reg_ptr的电源控制器regulator_enable,下面再解析
...
case SENSOR_I2C_MUX:
if (ctrl->i2c_conf && ctrl->i2c_conf->use_i2c_mux)
msm_camera_enable_i2c_mux(ctrl->i2c_conf); //打开使能i2c_mux
break;
default:
...
}
//以下是每个时序节点解析完毕后,进行的延迟,可以没有
if (power_setting->delay > 20) {
msleep(power_setting->delay);
} else if (power_setting->delay) {
usleep_range(power_setting->delay * 1000,(power_setting->delay * 1000) + 1000);
}
}
...
return 0;
}
最后两个节点比较特殊:
第一个SENSOR_VREG:
在解析设备树节点的时候:
//从中有一路电vio为0V
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana";//"cam_vaf";
qcom,cam-vreg-min-voltage = <1800000 0 2850000 >;//2800000>;
qcom,cam-vreg-max-voltage = <1800000 0 2850000 >;//2800000>;
qcom,cam-vreg-op-mode = <200000 0 80000 100000>;
//在kernel中对设备树节点解析的时候
for (i = 0; i < count; i++) {
vreg[i].min_voltage = vreg_array[i];}//存入结构体中
在msm_sensor_driver_probe函数中调用msm_camera_fill_vreg_params
在里面遍历上电时序节点:
for (i = 0; i < power_setting_size; i++)
{
if (power_setting[i].seq_type != SENSOR_VREG)
continue;
switch (power_setting[i].seq_val) {
case CAM_VDIG:
...
case CAM_VIO:
for (j = 0; j < num_vreg; j++) {
if (!strcmp(cam_vreg[j].reg_name, "cam_vio")) {
power_setting[i].seq_val = j; //让seq_val 对准设备树的seq_val
break;
}
}
break;
case CAM_VANA:
...
case CAM_VAF:
...
case CAM_V_CUSTOM1:
...
}
}
//再进入此节点上电的时候有
msm_camera_config_single_vreg(..&ctrl->cam_vreg[power_setting->seq_val],..);
中间的参数就是设备树上的电压。
第二个节点SENSOR_I2C_MUX:
执行函数msm_camera_enable_i2c_mux—>可能是申请锁和一帧的内存空间
解析完毕后,最后两个节点是打开时序和I2C_MUX,如果成功上电便完成了。
对照规格书:
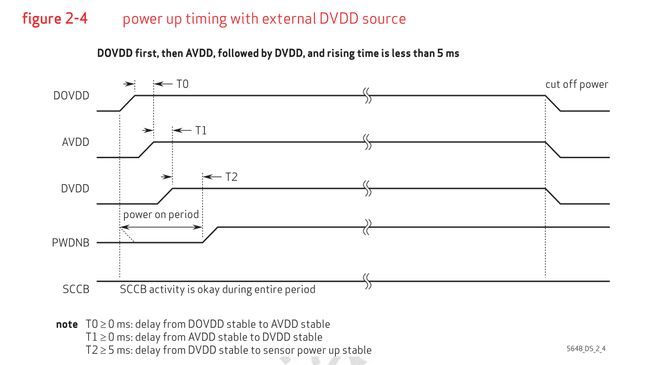
把DOVDD上电后,AVDD,DVDD,PWDNB的上电时序都大于图中规定时间。
回到msm_sensor_driver_probe函数中。
厉害呀,现在不妨换换思路,瞧点文学东西
如果你喜欢,聊历史,思哲学,品诗集,赏国学。
那就关注公众号:二校五叔
这个是博主的文学公众号啦_
加油