Camera学习心得(一) open流程
Camera API1 Open流程梳理
- 简述
- open流程
- PhotoDeviceController.java
- doOpenCamera
- CameraDeviceManagerImpl.java
- Framework层
- Camera.java
- Runtime层
- android_hardware_Camera.cpp
- Library层
- Client
- Camera.cpp
- CameraBase.h
- CameraBase.cpp
- Server
- IServiceManager.cpp
- CameraService.cpp
- CameraClient.cpp
- HAL层
- CameraHardwareInterface.cpp
- 盗用一张图总结一下
简述
接触Camera大概一年多时间了,因为平时工作侧重点主要是解决客户需求,并没有对Camera整个流程有个很系统性的了解,趁着最近项目不是很忙,对整个流程大概梳理一下.
在Android L版本之前Camera一直采用的是API1+HAL1架构,Android L版本以后,推出了API2+HAL3架构,从官方介绍来看,这个改变主要是性能方面的提升以及支持一些新的特性,当然具体还要看厂商的对这块的支持程度.这些不是本文的重点,本文主要是对Camera API1的调用流程进行一个简单的梳理.

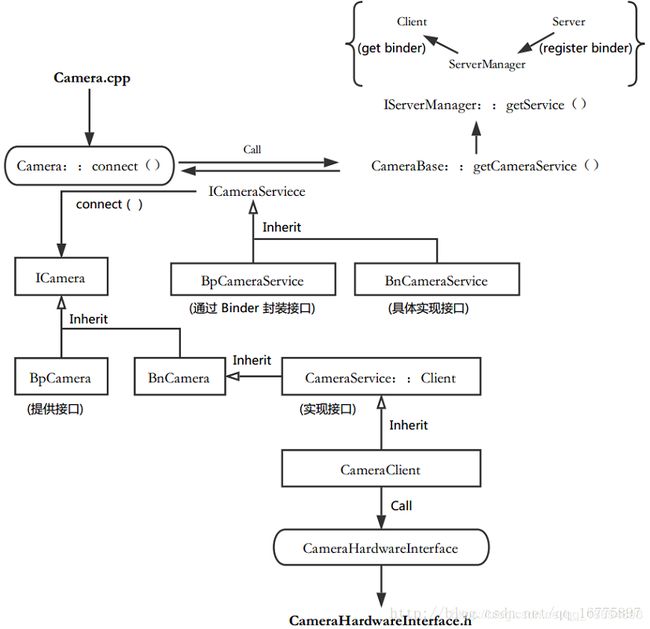
这是网上看到的一张关于Camera API1的流程框架图,其实Camera的层级结构是和Android架构对应的,自上而下,App层,Framework层,Runtime层,Library层,HAL层,首先从App层说起.
open流程
目前负责的Camera项目是基于MTK平台的Camera2来进行开发的,这套Camera代码结构设计的还是挺牛逼的,遵循高内聚,低耦合,试图分离,逻辑还是比较清晰的,主要有host,common,feature三个主要目录,host为主框架,包括了CameraActivity,CameraUI等主要的类;common里面主要包含一些公共的类库,定义了一些通信的公共接口;feature里面又包含了mode和settings两个目录,mode里面主要就是Camera里面的每一个模式的相关类,settings顾名思义就是Camera里面关于设置的相关类,有兴趣的可以自行查看源码.
PhotoDeviceController.java
doOpenCamera
try {
//when open the camera need reset the mCameraProxy to null
if (sync) {
mCameraDeviceManager.openCameraSync(mCameraId, mCameraProxyStateCallback, null);
} else {
mCameraDeviceManager.openCamera(mCameraId, mCameraProxyStateCallback, null);①
}
} catch (CameraOpenException e) {
//need show error and finish the activity.
if (CameraOpenException.ExceptionType.SECURITY_EXCEPTION == e.getExceptionType()) {
CameraUtil.showErrorInfoAndFinish(mActivity, CameraUtil
.CAMERA_HARDWARE_EXCEPTION);
}
}
截取部分关键代码,①处执行了mCameraDeviceManager.openCamera方法,第一个参数就是我们要open的camera ID,后摄是0,前摄为1,第二个参数,是open camera的状态,如下面代码所示:
/**
* Open camera device state callback, this callback is send to camera device manager
* by open camera interface.
*/
private class CameraDeviceProxyStateCallback extends CameraProxy.StateCallback {
@Override
public void onOpened(@Nonnull CameraProxy cameraProxy) {
LogHelper.i(TAG, "[onOpened]proxy = " + cameraProxy + " state = " + mCameraState);
synchronized (mWaitCameraOpenDone) {
mCameraProxy = cameraProxy;
mWaitCameraOpenDone.notifyAll();
mRequestHandler.obtainMessage(PhotoDeviceAction.ON_CAMERA_OPENED, cameraProxy)
.sendToTarget();
}
}
@Override
public void onClosed(@Nonnull CameraProxy cameraProxy) {
LogHelper.i(TAG, "[onClosed] current proxy : " + mCameraProxy + " closed proxy " +
"= " + cameraProxy);
if (mCameraProxy != null && mCameraProxy == cameraProxy) {
synchronized (mWaitCameraOpenDone) {
mWaitCameraOpenDone.notifyAll();
}
}
}
@Override
public void onDisconnected(@Nonnull CameraProxy cameraProxy) {
LogHelper.i(TAG, "[onDisconnected] current proxy : " + mCameraProxy + " closed " +
" proxy " + cameraProxy);
mCaptureCount.set(0);
captureDone();
if (mCameraProxy != null && mCameraProxy == cameraProxy) {
synchronized (mWaitCameraOpenDone) {
mCameraState = CameraState.CAMERA_UNKNOWN;
mWaitCameraOpenDone.notifyAll();
mRequestHandler.obtainMessage(PhotoDeviceAction.ON_CAMERA_DISCONNECTED,
cameraProxy).sendToTarget();
}
}
}
@Override
public void onError(@Nonnull CameraProxy cameraProxy, int error) {
LogHelper.i(TAG, "[onError] current proxy : " + mCameraProxy + " error " + error +
" proxy " + cameraProxy);
//if current is in capturing, but close is wait capture done,
//so this case need notify the capture done. otherwise will be ANR to pause.
mCaptureCount.set(0);
captureDone();
if ((mCameraProxy != null && mCameraProxy == cameraProxy)
|| error == CameraUtil.CAMERA_OPEN_FAIL) {
synchronized (mWaitCameraOpenDone) {
mCameraState = CameraState.CAMERA_UNKNOWN;
mWaitCameraOpenDone.notifyAll();
mRequestHandler.obtainMessage(PhotoDeviceAction.ON_CAMERA_ERROR, error, 0,
cameraProxy).sendToTarget();
}
}
}
}
}
从代码里面可以看出,open,close,disconnect,error状态都有相应的回调,最后一个参数直接传递null值,经过一些接口调用和消息传递,最终会执行到CameraDeviceManagerImpl.java这个类中,接着往下看.
CameraDeviceManagerImpl.java
public void handleMessage(Message msg) {
super.handleMessage(msg);
switch (msg.what) {
case MSG_OPEN_CAMERA:
...
if (mCameraProxy == null) {
LogHelper.i(mHandlerTag, "[openCamera]+");
long startTime = SystemClock.uptimeMillis();
FeatureLoader.notifySettingBeforeOpenCamera(mContext, mCameraId,
CameraApi.API1);
retryOpenCamera();①
}
mOpenStateCallback.onOpened(mCameraProxy);②camera已经打开,可以执行接下来的动作startPreview...
...
}
}
我们只看关键代码,①处代码调用了retryOpenCamera方法:
private void retryOpenCamera() {
try {
mCamera = CameraEx.openLegacy(Integer.parseInt(mCameraId),
CameraEx.CAMERA_HAL_API_VERSION_1_0);①
} catch (RuntimeException e) {
LogHelper.e(mHandlerTag, "[retryOpenCamera] error: " + e.getMessage());
if (isNeedRetryOpen()) {
mOpenStateCallback.onRetry();
LogHelper.e(mHandlerTag, "[retryOpenCamera] retry time: " + mRetryCount);
retryOpenCamera();
return;
}
mOpenStateCallback.onError(new CameraProxy(mCameraId, mRequestHandler, mCamera),
CameraUtil.CAMERA_OPEN_FAIL);
}
}
private boolean isNeedRetryOpen() {
if (mRetryCount < OPEN_RETRY_COUNT) {
mRetryCount++;
return true;
}
return false;
}
在retryOpenCamera方法里面,调用了MTK封装的openLegacy方法,参数里面我们也可以看到,传递的是CAMERA_HAL_API_VERSION_1_0,说明走的是HAL1流程:
public static Camera openLegacy(int cameraId, int halVersion) {
if (VERSION.SDK_INT > 21 && VERSION.SDK_INT < 28) {
try {
return Camera.openLegacy(cameraId, halVersion);
} catch (RuntimeException var3) {
Log.e("CamAp_CameraEx", "[openLegacy] exception:" + var3);
throw var3;
}
} else {
return Camera.open(cameraId);
}
}
在openLegacy方法里面,可以看到如果我们的Android版本高于5.0执行的是MTK封装的openLegacy方法,反之直接执行open方法,这里我们直接分析Camera.open方法.
Framework层
Camera.java
public static Camera open() {
int numberOfCameras = getNumberOfCameras();
CameraInfo cameraInfo = new CameraInfo();
for (int i = 0; i < numberOfCameras; i++) {
getCameraInfo(i, cameraInfo);
if (cameraInfo.facing == CameraInfo.CAMERA_FACING_BACK) {①
return new Camera(i);②
}
}
return null;
}
首先获取摄像头的个数,通过getCameraInfo(i, cameraInfo)来获取Camera的相关信息,①处判断可以看到如果不指定打开的Camera ID的话,默认打开的是后置摄像头,②处直接返回一个Camera对象:
Camera(int cameraId) {
int err = cameraInitNormal(cameraId);
if (checkInitErrors(err)) {
if (err == -EACCES) {
throw new RuntimeException("Fail to connect to camera service");
} else if (err == -ENODEV) {
throw new RuntimeException("Camera initialization failed");
}
// Should never hit this.
throw new RuntimeException("Unknown camera error");
}
}
private int cameraInitNormal(int cameraId) {
return cameraInitVersion(cameraId, CAMERA_HAL_API_VERSION_NORMAL_CONNECT);
}
private int cameraInitVersion(int cameraId, int halVersion) {
...
return native_setup(new WeakReference(this), cameraId, halVersion,
ActivityThread.currentOpPackageName());
...
}
private native final int native_setup(Object camera_this, int cameraId, int halVersion,
String packageName);
这里调用了native_setup方法,到此,Framework层调用流程结束.
Runtime层
android_hardware_Camera.cpp
static jint android_hardware_Camera_native_setup(JNIEnv *env, jobject thiz,
jobject weak_this, jint cameraId, jint halVersion, jstring clientPackageName)
{
...
sp camera;
if (halVersion == CAMERA_HAL_API_VERSION_NORMAL_CONNECT) {
// Default path: hal version is don't care, do normal camera connect.
camera = Camera::connect(cameraId, clientName,
Camera::USE_CALLING_UID, Camera::USE_CALLING_PID);①
} else {
jint status = Camera::connectLegacy(cameraId, halVersion, clientName,
Camera::USE_CALLING_UID, camera);
if (status != NO_ERROR) {
return status;
}
}
...
}
这里注册了native_setup本地方法,有关JNI的相关知识可以自行了解,这里就不在具体说明,sp代表枪强指针,①处代码可以看到调用了Camera.cpp的connect方法.
Library层
Library层采用了C/S架构,分别为Client,Service,先来看一下Client的主要流程:
Client
Camera.cpp
sp Camera::connect(int cameraId, const String16& clientPackageName,
int clientUid, int clientPid)
{
return CameraBaseT::connect(cameraId, clientPackageName, clientUid, clientPid);
}
这里调用了CameraBaseT的connect函数,继续看下CameraBase.h这个头文件里面的定义:
CameraBase.h
typedef CameraBase CameraBaseT;
所以CameraBaseT::connect实际调用的是CameraBase.cpp里面的connect函数:
CameraBase.cpp
sp CameraBase::connect(int cameraId,
const String16& clientPackageName,
int clientUid, int clientPid)
{
ALOGV("%s: connect", __FUNCTION__);
sp c = new TCam(cameraId);
sp cl = c;
const sp<::android::hardware::ICameraService> cs = getCameraService();①
binder::Status ret;
if (cs != nullptr) {
TCamConnectService fnConnectService = TCamTraits::fnConnectService;
ret = (cs.get()->*fnConnectService)(cl, cameraId, clientPackageName, clientUid,
clientPid, /*out*/ &c->mCamera);②
}
if (ret.isOk() && c->mCamera != nullptr) {
IInterface::asBinder(c->mCamera)->linkToDeath(c);
c->mStatus = NO_ERROR;
} else {
ALOGW("An error occurred while connecting to camera %d: %s", cameraId,
(cs == nullptr) ? "Service not available" : ret.toString8().string());
c.clear();
}
return c;
}
这里面的代码就关键了,先来看下①处代码,这里调用了getService函数:
const sp<::android::hardware::ICameraService> CameraBase::getCameraService()
{
Mutex::Autolock _l(gLock);
if (gCameraService.get() == 0) {
char value[PROPERTY_VALUE_MAX];
property_get("config.disable_cameraservice", value, "0");
if (strncmp(value, "0", 2) != 0 && strncasecmp(value, "false", 6) != 0) {
return gCameraService;
}
sp sm = defaultServiceManager();①
sp binder;
do {
binder = sm->getService(String16(kCameraServiceName));
if (binder != 0) {
break;
}
ALOGW("CameraService not published, waiting...");
usleep(kCameraServicePollDelay);
} while(true);
if (gDeathNotifier == NULL) {
gDeathNotifier = new DeathNotifier();
}
binder->linkToDeath(gDeathNotifier);
gCameraService = interface_cast<::android::hardware::ICameraService>(binder);②
}
ALOGE_IF(gCameraService == 0, "no CameraService!?");
return gCameraService;
}
上面已经提到过,Library层采用的C/S架构,分为Client process和Service process,两个进程之间通过什么进行通信呢,自然是Binder,BInder在Native层的原理暂时还没有搞得太明白,接下来准备深入研究一下这块,这里只简单的说一下.首先判断gCameraService(ICameraService对象)是否已经存在,如果已经存在则直接返回,如果不存在则执行①处代码,①处的函数在
IServiceManager.cpp里面定义:
Server
IServiceManager.cpp
sp defaultServiceManager()
{
if (gDefaultServiceManager != NULL) return gDefaultServiceManager;
{
AutoMutex _l(gDefaultServiceManagerLock);
while (gDefaultServiceManager == NULL) {
gDefaultServiceManager = interface_cast(
ProcessState::self()->getContextObject(NULL));
if (gDefaultServiceManager == NULL)
sleep(1);
}
}
return gDefaultServiceManager;
}
可以看到这里返回的IServiceManager类型的gDefaultServiceManager对象,回到getCameraService函数中,获取到gDefaultServiceManager对象后,通过调用getService函数来获取ICameraService对象,看下fnConnectService如何定义(在Camera.cpp中定义)的:
CameraTraits::TCamConnectService CameraTraits::fnConnectService =
&::android::hardware::ICameraService::connect;
所以最终还是调用了ICameraService的connect函数,也就是CameraService.cpp的connect函数:
CameraService.cpp
Status CameraService::connect(
const sp& cameraClient,
int cameraId,
const String16& clientPackageName,
int clientUid,
int clientPid,
/*out*/
sp* device) {
ATRACE_CALL();
Status ret = Status::ok();
String8 id = String8::format("%d", cameraId);
sp client = nullptr;
#if 0
ret = connectHelper(cameraClient, id,
CAMERA_HAL_API_VERSION_UNSPECIFIED, clientPackageName, clientUid, clientPid, API_1,
/*legacyMode*/ false, /*shimUpdateOnly*/ false,
/*out*/client);
#else // Third-party using API1.0, add by [email protected] at 20180502 start +++
ret = connectHelper(cameraClient, id,
256/*CAMERA_HAL_API_VERSION_1_0*/, clientPackageName, clientUid, clientPid, API_1,
/*legacyMode*/ false, /*shimUpdateOnly*/ false,
/*out*/client);
#endif // end +++
if(!ret.isOk()) {
logRejected(id, getCallingPid(), String8(clientPackageName),
ret.toString8());
return ret;
}
*device = client;
return ret;
}
可以看到在connect函数里面调用了connectHelper函数:
Status CameraService::connectHelper(const sp& cameraCb, const String8& cameraID,
int halVersion, const String16& clientPackageName, int clientUid, int clientPid,
apiLevel effectiveApiLevel, bool legacyMode, bool shimUpdateOnly,
/*out*/sp& device)
...
if(!(ret = makeClient(this, cameraCb, clientPackageName, cameraId, facing, clientPid,
clientUid, getpid(), legacyMode, halVersion, deviceVersion, effectiveApiLevel,
/*out*/&tmp)).isOk()) ①{
return ret;
}
err = client->initialize(mCameraProviderManager);
...
}
又到了关键的地方,在①处调用了makeClient函数来创建客户端对象:
Status CameraService::makeClient(const sp& cameraService,
const sp& cameraCb, const String16& packageName, const String8& cameraId,
int facing, int clientPid, uid_t clientUid, int servicePid, bool legacyMode,
int halVersion, int deviceVersion, apiLevel effectiveApiLevel,
/*out*/sp* client) {
if (halVersion < 0 || halVersion == deviceVersion) {
// Default path: HAL version is unspecified by caller, create CameraClient
// based on device version reported by the HAL.
switch(deviceVersion) {
case CAMERA_DEVICE_API_VERSION_1_0:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp tmp = static_cast(cameraCb.get());
*client = new CameraClient(cameraService, tmp, packageName, cameraIdToInt(cameraId),
facing, clientPid, clientUid, getpid(), legacyMode);①
} else { // Camera2 API route
ALOGW("Camera using old HAL version: %d", deviceVersion);
return STATUS_ERROR_FMT(ERROR_DEPRECATED_HAL,
"Camera device \"%s\" HAL version %d does not support camera2 API",
cameraId.string(), deviceVersion);
}
break;
case CAMERA_DEVICE_API_VERSION_3_0:
case CAMERA_DEVICE_API_VERSION_3_1:
case CAMERA_DEVICE_API_VERSION_3_2:
case CAMERA_DEVICE_API_VERSION_3_3:
case CAMERA_DEVICE_API_VERSION_3_4:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp tmp = static_cast(cameraCb.get());
*client = new Camera2Client(cameraService, tmp, packageName, cameraIdToInt(cameraId),
facing, clientPid, clientUid, servicePid, legacyMode);
} else { // Camera2 API route
sp tmp =
static_cast(cameraCb.get());
*client = new CameraDeviceClient(cameraService, tmp, packageName, cameraId,
facing, clientPid, clientUid, servicePid);
}
break;
default:
// Should not be reachable
ALOGE("Unknown camera device HAL version: %d", deviceVersion);
return STATUS_ERROR_FMT(ERROR_INVALID_OPERATION,
"Camera device \"%s\" has unknown HAL version %d",
cameraId.string(), deviceVersion);
}
} else {
// A particular HAL version is requested by caller. Create CameraClient
// based on the requested HAL version.
if (deviceVersion > CAMERA_DEVICE_API_VERSION_1_0 &&
halVersion == CAMERA_DEVICE_API_VERSION_1_0) {
// Only support higher HAL version device opened as HAL1.0 device.
sp tmp = static_cast(cameraCb.get());
*client = new CameraClient(cameraService, tmp, packageName, cameraIdToInt(cameraId),
facing, clientPid, clientUid, servicePid, legacyMode);
} else {
// Other combinations (e.g. HAL3.x open as HAL2.x) are not supported yet.
ALOGE("Invalid camera HAL version %x: HAL %x device can only be"
" opened as HAL %x device", halVersion, deviceVersion,
CAMERA_DEVICE_API_VERSION_1_0);
return STATUS_ERROR_FMT(ERROR_ILLEGAL_ARGUMENT,
"Camera device \"%s\" (HAL version %d) cannot be opened as HAL version %d",
cameraId.string(), deviceVersion, halVersion);
}
}
return Status::ok();
}
在makeClient函数里面会通过对HAL版本的判断来创建不同的Client对象,因为本篇文章分析的是HAL1,所以走的是①处代码:
CameraClient.cpp
status_t CameraClient::initialize(sp manager) {
...
mHardware = new CameraHardwareInterface(camera_device_name);
res = mHardware->initialize(manager);
...
mHardware->setCallbacks(notifyCallback,
dataCallback,
dataCallbackTimestamp,
handleCallbackTimestampBatch,
(void *)(uintptr_t)mCameraId);
...
}
可以看到在CameraClient.cpp的initialize函数中,创建了CameraHardwareInterface类型的对象,然后执行了initialize函数:
HAL层
CameraHardwareInterface.cpp
status_t CameraHardwareInterface::initialize(sp manager) {
ALOGI(“Opening camera %s”, mName.string());
status_t ret = manager->openSession(mName.string(), this, &mHidlDevice);
if (ret != OK) {
ALOGE("%s: openSession failed! %s (%d)", __FUNCTION__, strerror(-ret), ret);
}
return ret;
}
通过 manager.openSession调用HAL中的库,我们的指令就能传递到 Linux Kernel,从而下达到具体的设备上.(与具体的驱动相关,暂时不去分析)最后初始化预览窗口.HAL层暂时还没有去深究,待研究后再总结一下.
盗用一张图总结一下
参考链接:
https://blog.csdn.net/qq_16775897/article/details/77509476
https://blog.csdn.net/qq_16775897/article/details/77450421