激光SLAM(二):轮式里程计模型及标定
轮式里程计模型及标定
- 模型
- 两轮差分底盘的运动学模型(以下简称运动模型)
- 目的
- 已知量
- 未知量
- 图
- 推导
- r r r
- w w w
- v v v
- 向量表示
- 航迹推算
- 递推公式
- 图
- 标定
- 线性最小二乘的基本原理
- 基础知识
- 线性方程组
- 最小二乘解
- 最小二乘求解
- 线性最小二乘的直线拟合
- 直线拟合
- 线性最小二乘在里程计标定中的应用
- 直接线性方法(通用、黑盒)
- 基于模型的方法(定制、白盒)
- 假设
- 符号及推导
- 总结
模型
两轮差分底盘的运动学模型(以下简称运动模型)
目的
通过已知量推出未知量。
已知量
两轮角速度: w L , w R w_L,w_R wL,wR
两轮线速度: v L , v R v_L,v_R vL,vR
轮子离底盘中心的距离: d d d
两轮之间的距离: b = 2 d b=2d b=2d
未知量
底盘中心的线速度: v v v
底盘中心的角速度: w w w
底盘中心圆弧运动的半径: r r r
图
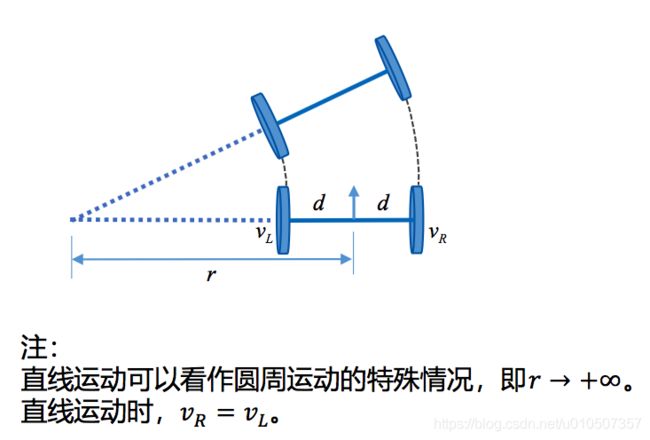
推导
首先明确,左右轮子的角速度是相同的,即
w L = w R w = w l = w r w_L=w_R\\ w=w_l=w_r wL=wRw=wl=wr
其次明确,线速度是沟通大圆周(整个运动模型转圈)和小圆周(轮子转圈)的桥梁,即
v L = w l ∗ ( r − d ) = w L ∗ r L v R = w r ∗ ( r + d ) = w R ∗ r R v_L=w_l*(r-d)=w_L*r_L\\ v_R=w_r*(r+d)=w_R*r_R vL=wl∗(r−d)=wL∗rLvR=wr∗(r+d)=wR∗rR
r r r
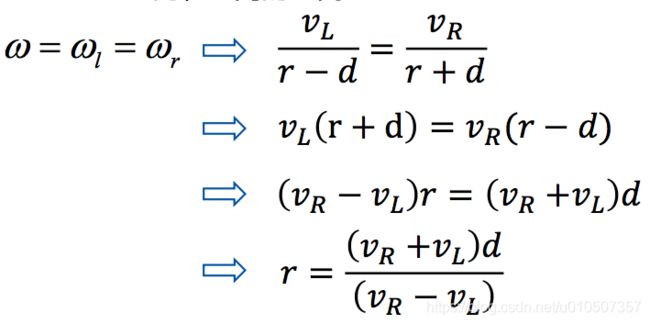
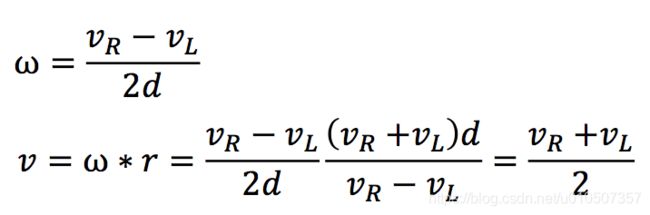
w w w

v v v
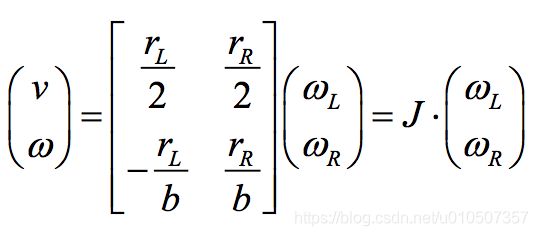
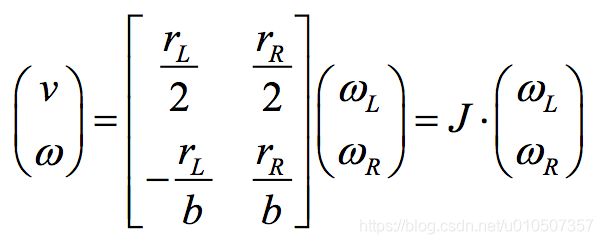
向量表示
航迹推算
递推公式
图
标定
线性最小二乘的基本原理
基础知识
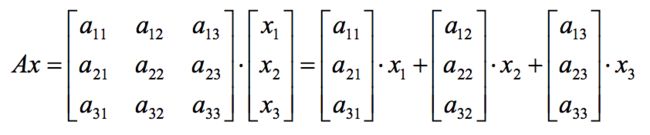
线性方程组
A x = b Ax=b Ax=b
其中, A A A为 m ∗ n m*n m∗n的矩阵, x x x为 n ∗ 1 n*1 n∗1的向量。
m m m表示约束个数, n n n表示自变量个数。
- 当 m = n m=n m=n时,适定方程组,方程组有唯一解
- 当 m < n m
m<n 时,欠定方程组,方程组有无穷多解 - 当 m > n m>n m>n时,超定方程组,方程组通常无解
最小二乘解
- 绝大多数情况为 m > n m>n m>n,超定方程组
- 多数约束自相矛盾,无解!
- 无解但有最小二乘解
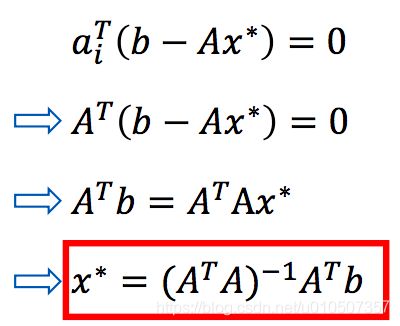
- 通解: x ∗ = ( A T A ) − 1 A T b x^*=(A^TA)^{-1}A^Tb x∗=(ATA)−1ATb
下面会推导通解是怎么来的。
最小二乘求解
从线性空间的角度看最小二乘求解。
S S S表示 A A A的列向量张成的线性空间。
- 无解:表示 A x = b Ax=b Ax=b对于任意的 x x x均不成立,即 b b b不在 S S S中
- 最小二乘解:线性空间 S S S中,离 b b b最近的向量
设: A x ∗ Ax^* Ax∗为向量 b b b在空间 S S S中的投影,显然 ( b − A x ∗ ) (b-Ax^*) (b−Ax∗)垂直于空间 S S S。
则: ( b − A x ∗ ) (b-Ax^*) (b−Ax∗)跟矩阵A中的每一个列向量都垂直。
令 A = [ a 1 , a 2 , … … , a n ] , a i A=[a_1,a_2,……,a_n],a_i A=[a1,a2,……,an],ai表示矩阵 A A A的第 i i i个列向量,
可得
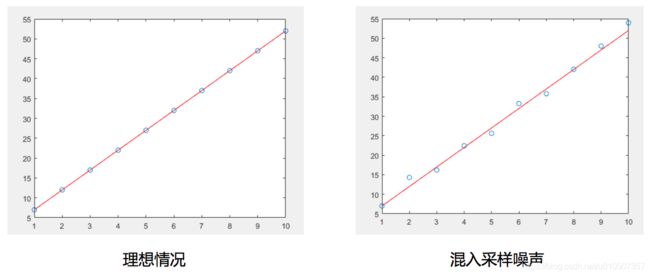
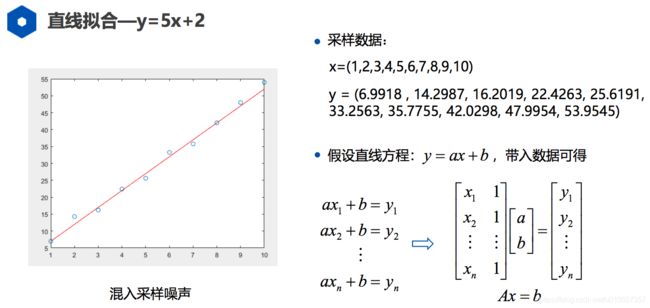
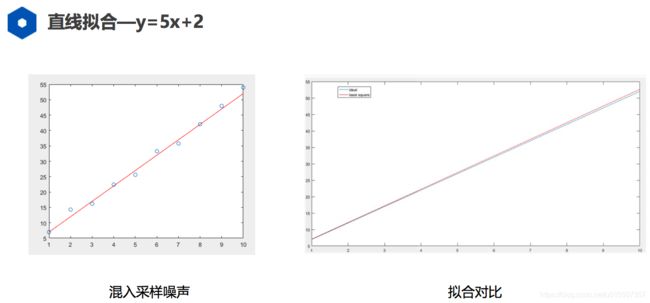
线性最小二乘的直线拟合
直线拟合
线性最小二乘在里程计标定中的应用
直接线性方法(通用、黑盒)
基于模型的方法(定制、白盒)
根据运动模型有
里程计的积分如下
假设
假设在标定的 Δ t Δt Δt时间内匀速运动,则
w ( t ) = w = J 21 w L + J 22 w R v ( t ) = v = J 11 w L + J 12 w R w(t)=w=J_{21}w_L+J_{22}w_R\\ v(t)=v=J_{11}w_L+J_{12}w_R w(t)=w=J21wL+J22wRv(t)=v=J11wL+J12wR
因为 J 11 = − b 2 ∗ J 21 , J 12 = b 2 ∗ J 22 J_{11}=-\frac{b}{2}*J_{21},J_{12}=\frac{b}{2}*J_{22} J11=−2b∗J21,J12=2b∗J22,
所以 v ( t ) = v = b 2 ( − J 21 w L + J 22 w R ) v(t)=v=\frac{b}{2}(-J_{21}w_L+J_{22}w_R) v(t)=v=2b(−J21wL+J22wR)。
因此,已知量 w L , w R w_L,w_R wL,wR,未知量 b , r L , r R , v b,r_L,r_R,v b,rL,rR,v。
未知量求解顺序 b b b→ r L , r R r_L,r_R rL,rR→ v v v。
假设
- 激光雷达位于车体的正中心
- 激光雷达的匹配值作为观测值
- 里程计的积分值作为预测值
通过最小化预测值和观测值的差,即可得到里程计的参数。
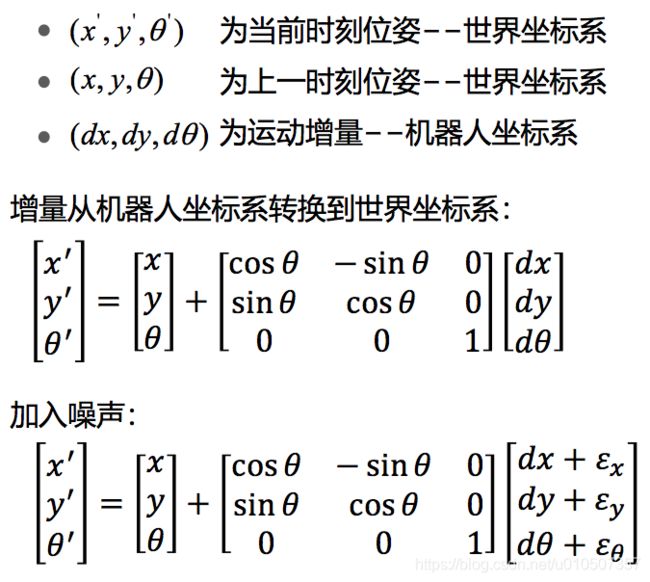
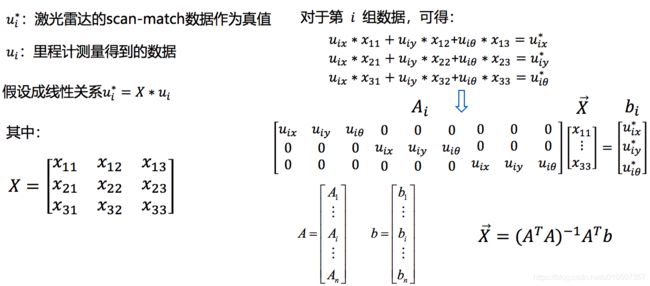
符号及推导
符号
- 里程计的积分值: r x , r y , r θ r_x,r_y,r_\theta rx,ry,rθ
- 激光雷达的匹配值: S x , S y , S θ S_x,S_y,S_\theta Sx,Sy,Sθ
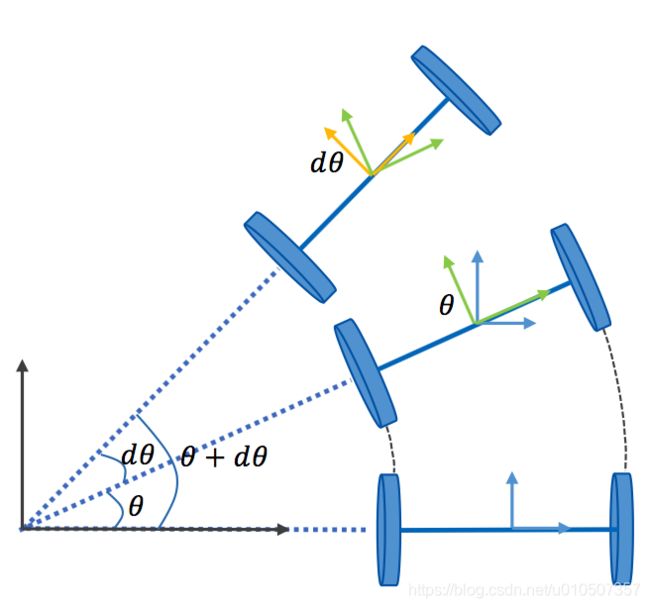
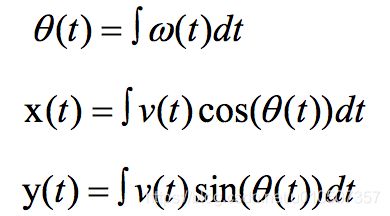
推导

( θ ( t ) \theta(t) θ(t)为运动模型在时刻 t t t与世界坐标系 x x x轴的夹角)
总结
收集 n n n段数据,每段数据包含两个轮子的角速度 w L w_L wL和 w R w_R wR,该段数据持续的时间为 Δ t Δt Δt以及激光雷达的匹配值为 S x , S y , S θ S_x,S_y,S_\theta Sx,Sy,Sθ。
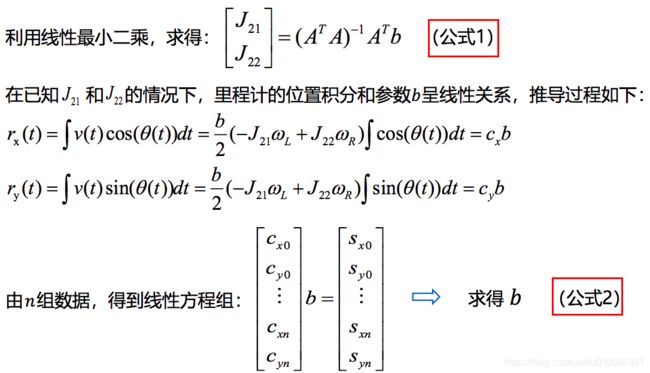
- 按照公式1,计算中间变量 J 21 J_{21} J21和 J 22 J_{22} J22
- 按照公式2,计算轮间距 b b b
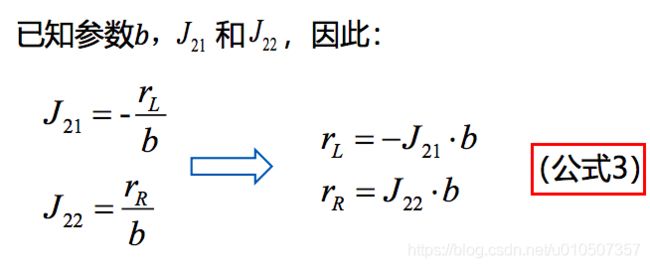
- 按照公式3,计算两个轮子的半径 r L , r R r_L,r_R rL,rR
部分图片来自深蓝学院课件,侵删。