论文笔记Revisiting the Sibling Head in Object Detector
论文笔记Revisiting the Sibling Head in Object Detector
- 1. 论文标题及来源
- 2. 拟解决问题
- 3. 解决方法
- 3.1 算法流程
- 3.2 task-aware空间解耦模块
- 3.3 渐进式约束
- 4. 实验结果
- 4.1 消融实验
- 4.2 OpenImage实验结果
- 4.3 COCO实验结果
- 5. 总结
1. 论文标题及来源
Revisiting the Sibling Head in Object Detector, CVPR, 2020
下载地址:https://arxiv.org/abs/2003.07540
2. 拟解决问题
分类和回归的过程中特征不对齐问题,如下图所示(颜色越暖越好)

即当使用同一个特征进行分类和回归时,它的性能不能很好地得到平衡
3. 解决方法
3.1 算法流程

a. 将图片输入骨干网络提取特征
b. 通过RPN得到响应图
c. 通过Sibling head生成proposal
d. 将生成的每个proposal输入到Spatial distanglement模块分别得到用于分类的proposal和用于回归的proposal,即每个proposal会生成两个proposal,一个用于分类,另一个用于回归
e. 将用于分类的propostal输入分类分支得到分类得分;将用于回归的proposal输入回归分支得到回归偏移
f. 通过nms得到最终结果
3.2 task-aware空间解耦模块
如上图b所示,将proposal的ROI特征输入到上图b中,然后使用一个3层的全连接网络生成两个proposal,一个用于分类,一个用于回归。该模块通过下述公式学习相应的特征偏移。
Δ R = γ F r ( F ; θ r ) ⋅ ( w , h ) \Delta R = \gamma F_r(F;\theta_r) \cdot (w, h) ΔR=γFr(F;θr)⋅(w,h)
P r ⌢ = P + Δ R \overset {\frown} {P_r} = P + \Delta R Pr⌢=P+ΔR
通过上述公式生成用于回归的progosal, γ \gamma γ是一个超参数,用于控制贡献程度, Δ R ∈ R 1 × 1 × 2 \Delta R \in R^{1 \times 1 \times 2} ΔR∈R1×1×2
Δ C = γ F c ( F ; θ c ) ⋅ ( w , h ) \Delta C = \gamma F_c(F;\theta_c) \cdot (w, h) ΔC=γFc(F;θc)⋅(w,h)
F ⌢ c ( x , y ) = ∑ p ∈ G ( x , y ) F B ( p 0 + Δ C ( x , y , 1 ) , p 1 + Δ C ( x , y , 2 ) ) ∣ G ( x , y ) ∣ \overset {\frown} F_c(x, y) = \sum_{p \in G(x, y)} \frac{F_B(p_0 + \Delta C(x, y , 1),\ \ \ p1 + \Delta C(x, y, 2))}{|G(x, y)|} F⌢c(x,y)=p∈G(x,y)∑∣G(x,y)∣FB(p0+ΔC(x,y,1), p1+ΔC(x,y,2))
通过上述公式生成分类的特征偏移,然后通过线性插值获得用于分类的proposal, Δ C ∈ R k × k × 2 \Delta C \in R^{k \times k \times 2} ΔC∈Rk×k×2, G ( x , y ) G(x, y) G(x,y)响应图上坐标为(x, y)的锚点(anchor), ∣ G ( x , y ) ∣ |G(x, y)| ∣G(x,y)∣表示采样的总锚点数, ( p x , p y ) (p_x, p_y) (px,py)表示采样点在网格G(x, y)的坐标, F B F_B FB表示线性插值函数
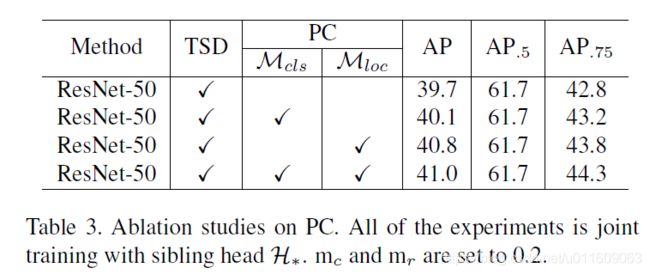
3.3 渐进式约束

H 1 ( y ∣ ⋅ ) H_1(y| \cdot) H1(y∣⋅)表示类别y的得分, ∣ ⋅ ∣ + |\cdot|_+ ∣⋅∣+类似于Relu方式。


4. 实验结果
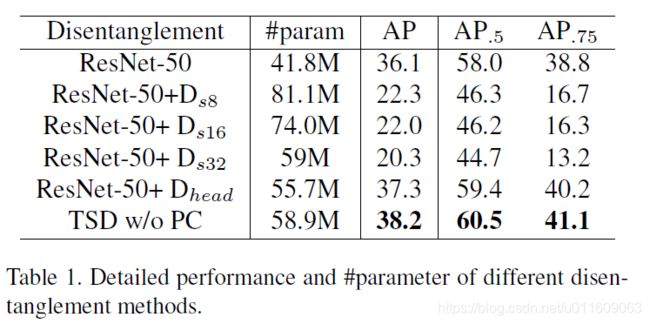
4.1 消融实验
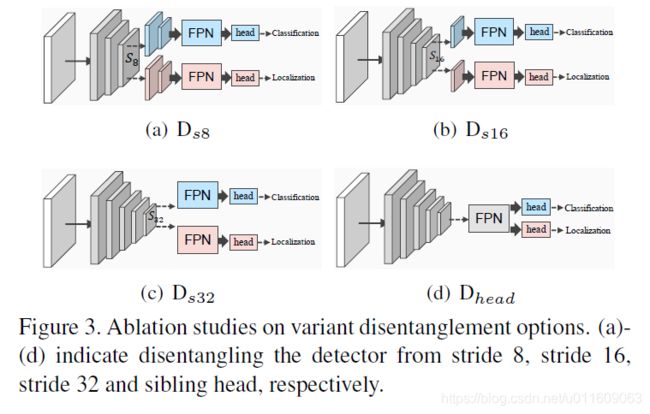





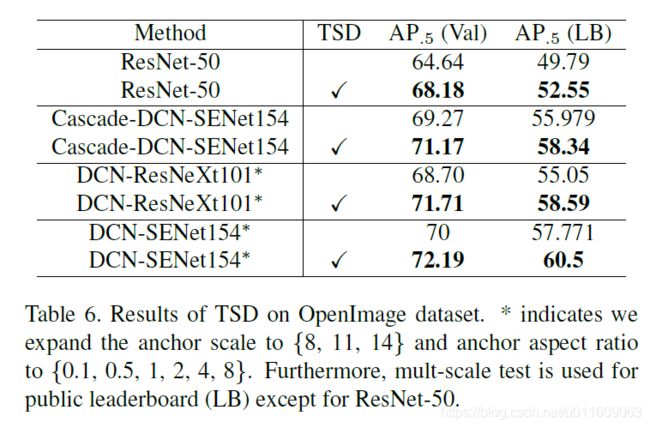
4.2 OpenImage实验结果
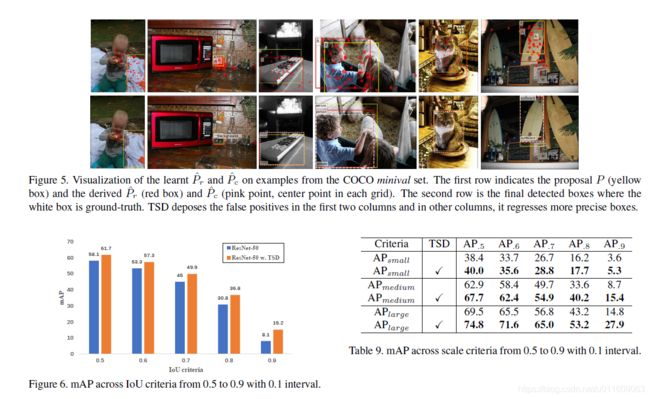
4.3 COCO实验结果

5. 总结
该算法通过实验发现分类和回归任务使用的特征不一样,提出使用解耦操作分别处理分类和回归,即通过一个原始的proposal生成两个proposal,一个用于分类,另一个用于回归,使它们能生成各自需要的特征,通过渐进性约束进一步提升算法性能。