IMU的数学模型与误差标定问题
IMU数学模型
加速度计
首先,对于世界坐标系,一般我们会使用最常见的东北天(ENU)坐标系G(无关远点位置,只与姿态有关)。

在这个坐标系中,重力加速度为
![]()
此时,假设IMU坐标系就是ENU坐标系,则![]() ,静止时有(其中
,静止时有(其中![]() 是测量值):
是测量值):

所以,不静止时:(此处对a和g符号不做区分标记,因为假设body系与Global系一样)
![]()
由上可知,其实在物体做自由落体时imu测量的加速度才是0,静止时反而是
,这个是由加速度计的测量原理决定的。
上面讲的是在IMU坐标系也是ENU坐标系时的情况(此时位置无关,只关乎姿态)。大多数实际应用中,IMU坐标系(Body)一般是与ENU坐标系有一个姿态的变化的。此时,得到的理论测量值为:
![]()
此处
是将Global坐标转换到Body坐标姿态的旋转矩阵。此处可以看出,global坐标系的位置与body坐标系的位置与在两个系下测量的加速度大小无关。但是,与姿态有关。
陀螺仪
相比较于加速度计,陀螺仪相对简单。如果不考虑误差,则
![]()
我们会发现此处并没有像加速度计一样,将global坐标系下的角速度转换到陀螺仪的测量值,而是直接使用body系下的角速度。这是因为旋转叠加时(比如四元数和旋转矩阵表示姿态时),全局姿态是直接乘以body系下的更新量的就可以得到新的全局姿态的。
恢复运动轨迹
imu最后输出的是一个离散的加速度、角速度序列。我们想做的是利用这些恢复出运动的轨迹(也就是一个位姿的序列)。
下面会介绍两种离散积分的方法。欧拉法与中值法。
这两种方法,都是已知了![]() 时刻的位姿,
时刻的位姿,![]() 时刻与
时刻与![]() 时刻的测量值(加速度与角速度)。目的是求得
时刻的测量值(加速度与角速度)。目的是求得![]() 时刻的位姿。
时刻的位姿。
欧拉法
欧拉法,是直接使用![]() 时刻的测量值
时刻的测量值![]() 来积分。
来积分。

其中

中值法
中值法,使用两个相邻时刻![]() 到
到![]() 的位姿是用两个时刻的测量值
的位姿是用两个时刻的测量值![]() 的平均值来离散积分。
的平均值来离散积分。
其中
代码
for (int i = 0; i < imudata.size()-1; ++i) {
MotionData imupose = imudata[i];
MotionData imupose1 = imudata[i+1];
/*
// 欧拉积分
//delta_q = [1 , 1/2 * thetax , 1/2 * theta_y, 1/2 * theta_z]
Eigen::Quaterniond dq;
Eigen::Vector3d dtheta_half = imupose.imu_gyro * dt /2.0;
dq.w() = 1;
dq.x() = dtheta_half.x();
dq.y() = dtheta_half.y();
dq.z() = dtheta_half.z();
Eigen::Vector3d acc_w = Qwb * (imupose.imu_acc) + gw;
Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_w;
Vw = acc_w * dt + Vw;
Qwb = Qwb * dq;
Qwb.normalize();
*/
/// 中值积分
Eigen::Quaterniond dq;
Eigen::Vector3d dtheta_half = (imupose.imu_gyro + imupose1.imu_gyro)*dt/4.0;
dq.w() = 1;
dq.x() = dtheta_half.x();
dq.y() = dtheta_half.y();
dq.z() = dtheta_half.z();
Eigen::Quaterniond Qwb1 = Qwb * dq;
Qwb1.normalize();
Eigen::Vector3d acc_w = (Qwb * imupose.imu_acc + Qwb1 * imupose1.imu_acc)*0.5 + gw;
Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_w;
Vw = acc_w * dt + Vw;
Qwb = Qwb1;
//存储位姿
save_points<此处推荐一个生成imu数据、加噪声与测试的工具,这里中值积分与欧拉积分可以参考上面的我的代码,因为工具里可能不一定提供了。
旋转积分
上面恢复姿态轨迹的积分用了四元数的形式,下面我想多介绍几个
此处![]() 是imu的测量结果,也就是局部角速度。因为这个旋转积分的结果是姿态,因此下面会分别介绍使用四元数、SO3还有欧拉角下的积分方式。
是imu的测量结果,也就是局部角速度。因为这个旋转积分的结果是姿态,因此下面会分别介绍使用四元数、SO3还有欧拉角下的积分方式。
- 四元数的形式:
 形式:
形式:
![]()
- 欧拉角形式:
![]()
我们可以发现,这三种方法,对于全局姿态的变化,旋转矩阵与四元数都是直接使用imu的测量(也就是局部角速度)进行更新的。只有在欧拉角的形式里,
表示将IMU body坐标系下的角速度转化成欧拉角速度。此处可以推导出
欧拉角速度到imu输出角速度
这个挺有必要的,因为用欧拉角来表示姿态还是很方便的。
-
step1:绕着惯性坐标系的z轴旋转,得到新的坐标系

-
step2:绕着新坐标系
的y轴旋转得到坐标系
-
step3:绕着新坐标系
 的x轴旋转得到坐标系
的x轴旋转得到坐标系 ,
, 就是我们的body坐标系
就是我们的body坐标系
欧拉角速度到body角速度:
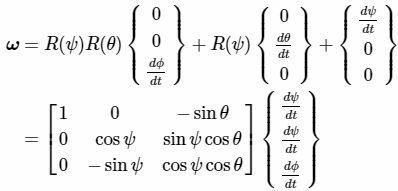
上面取逆就得到,如下body到欧拉角的变换:

误差与标定
加速度计和陀螺仪的误差可以分为确定性误差与随机误差。
确定性误差
确定性误差可以事先标定确定,包括:bias,scale …
bias
理论上,当没有外部作用时,IMU传感器的输出应该为0。但是,实际上数据存在一个偏置b。
scale
scale可以看成是实际数值和传感器输出值之间的比值。

Nonorthogonality/Misalignment Errors
在多轴IMU传感器制作的时候,由于制作工艺的问题的问题,会使得xyzxyz轴可能不垂直,这个也叫轴间误差。

轴间误差使得本来x轴的分量会对测量到的y轴与z轴的分量有影响。将其与scale误差相结合,会得到如下的测量与实际的对应关系。

其他确定性误差
bias与scale的误差是会受温度影响的,并且在运行中也许也会改变。
确定新误差的标定(六面法)
以加速度计为例,陀螺仪同理
指将加速度计的3个轴分别朝上或者朝下水平放置一段时间(对于陀螺仪就是在三个旋转轴上正反旋转,不过需要高精度转台),采集六个面的数据完成标定。
3个轴都是正交时

其中,![]() 为加速度计某个轴的测量值,
为加速度计某个轴的测量值,![]() 为当地的重力加速度。
为当地的重力加速度。
当具有轴间误差时
此时实际加速度和测量值之间的关系为:

水平静止放置6面的时候,加速度的理论值为:

对应的测量值矩阵L:
![]()
利用最小二乘就能够把12个变量求出来。
随机误差
随机误差主要有两部分,一个是高斯白噪声,一个是bias随机游走。
高斯白噪声
IMU数据连续时间上受到一个均值为0,方差为![]() ,各时刻之间相互独立的高斯过程
,各时刻之间相互独立的高斯过程![]() :
:

其中![]() 表示狄拉克函数。
表示狄拉克函数。
不过需要说明的是,实际上,IMU传感器获取的数据为离散采样,离散和连续高斯白噪声的方差之间存在如下转换关系:

即离散的序列的方差比连续的方差大
倍(传感器的采样时间)。
bias随机游走
通常使用维纳过程来建模bias随时间连续变化的过程,离散时间下称之为随机游走。
![]()
bias的变化的导数是其中![]() 是方差为1的白噪声。
是方差为1的白噪声。
同样,离散和连续之间的转换为:

bias随机游走的噪声方差离散的序列比连续的大
随机误差的标定(艾伦方差标定)
Allan方差法是20世纪60年代由美国国家标准局的David Allan提出的,它是一种基于时域的分析方法。具体流程如下:
-
保持传感器绝对静止获取数据
-
对数据进行分段,设置时间段的时长,如下图所示。
-
将传感器数据按照时间段进行平均。
-
计算方差,绘制艾伦曲线。
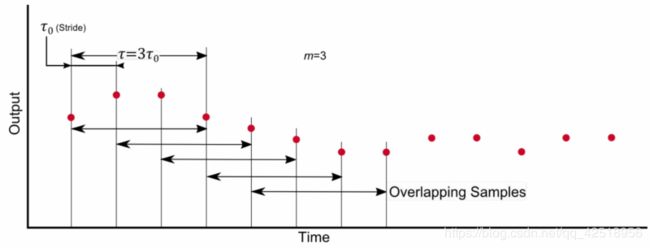
- 此处的艾伦方差的计算公式如下(将每个时间段长度作为一个变量,将每个时间段的数据求均值,计算方差):
- 忽略其他噪声的影响,Allan方差可以近似为各种噪声的和,化简为:

其中,Q:量化噪声误差系数;N:角速度随机游走误差系数;B:零偏不稳定性误差系数;K:速率随机游走误差系数;R:速率斜坡误差系数

(ps:其中表格中B那一项是乘法不是除法,写错了)
这里,绘制出来的艾伦曲线如下图所示:

其中t=1,斜率为-0.5处纵坐标的值为高斯白噪声方差,斜率为0.5,t=3处的纵坐标的值为随机游走方差。
下面给出两个github上的比较好用的标定工具。
-
imu_utils,额注意,这个工具的结果关于bias那一项输出的是bias稳定性的方差,不是随机游走的方差,因此,我们需要此工具生成的艾伦方差曲线自行完成bias随机游走方差的获得。。
-
kalibr_allan
加上误差模型后的理论测量值
- 加速度计
![]()
- 陀螺仪
![]()
- 低端传感器,可能会出现加速度影响陀螺仪的值的情况,也就是下面的第二项:
![]()