简易优化后的A*算法
A*算法优化过程
第一步,将点是否在open、close链表中的判断方式使用的数据结构更换为数组,利用空间换时间,在空间和时间之间进行折中,使用一字节中的两位分别代表一个元素是否在open、close链表中,如果内存足够可以进一步优化。
第二步,优化在open表中取最小值的方式,这里使用MuiltSet来实现自动排序,取最小元素时间O(1)。
第三步,地图预处理,使用地图整形数组的一个整形中的第八位表示四周可以展开的点,减小后期查找时间。
效率分析
寻路(限制寻路距离350),静态物体数量为25%,人物为200+(少于300),单次统计寻路此时平均90次左右。
地图尺寸128*128
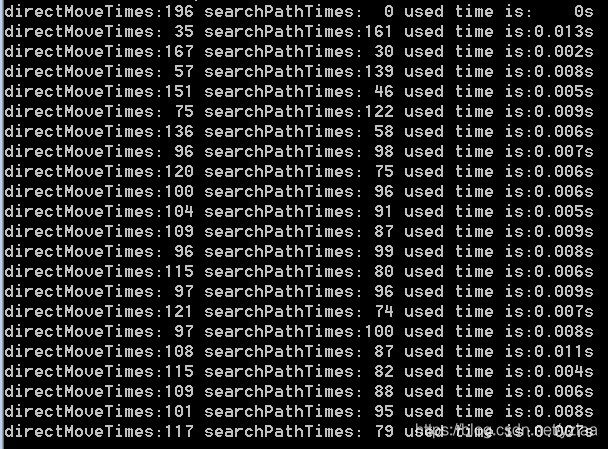
在较小尺寸地图内,A*算法查找非常高效,单次统计总耗时为0.05ms左右。
地图尺寸1000*1000
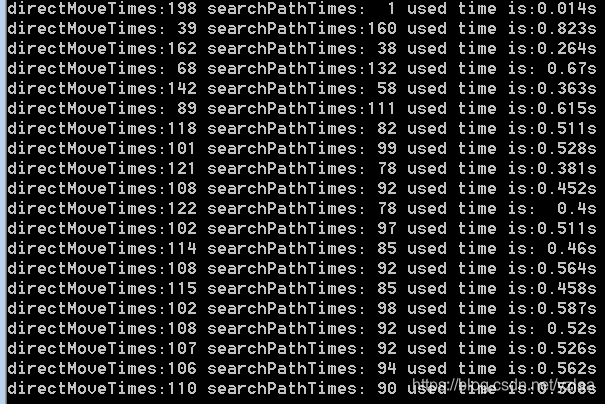
在增大地图尺寸之后,A*算法效率有所下降,但是在1000*1000尺寸规模单次统计做90次左右寻路的耗时还是在0.5s左右。
5000*5000尺寸地图
在5000*500尺寸的地图,单次统计100次左右寻路的耗时变得比较高。
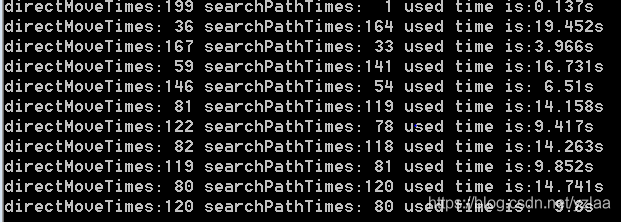
10000*10000尺寸地图
A*算法寻路变得非常吃力,单次寻路(限制距离350)耗时为450ms左右。由此可以得出结论A*算法效率是跟内存消耗具有很大关系,经常性读取内存不连续的变量操作将非常耗费性能,在大尺寸地图需要考虑其他方向的优化,比如预存路径,将地图分块等操作。
代码
#ifndef __ASTART_H__
#define __ASTART_H__
/********************************
** A*算法对象类
** by yys 2019年3月25日15:40:59
********************************/
#include "RedefineType.h"
#include
#include
#include
struct Point
{
__int16 _x, _y; //点坐标,这里为了方便按照C++的数组来计算,_x代表横排,_y代表竖列
int _F, _G, _H; //_F=_G+_H
Point *_parent; //_parent指针,指向父节点
Point(int x, int y) :_x(x), _y(y), _F(0), _G(0), _H(0), _parent(NULL) {} //变量初始化
Point() :_x(0), _y(0), _F(0), _G(0), _H(0), _parent(NULL) {} //默认构造函数
bool operator==(Point &p) { return p._x == _x && p._y == _y; } //重载等于
};
struct CmpPoint //set Point*的比较函数
{
bool operator()(const Point* p1, const Point* p2) const
{
return p1->_F < p2->_F;
}
};
class Person;
class Astar
{
//重命名类型 简化长度
using MSetPoint = std::multiset;
using VVint8 = std::vector>;
using Vint8 = std::vector<__int8>;
using VVPPoint = std::vector>;
using VPPoint = std::vector;
public:
Astar(bool isIgnoreCorner);
~Astar();
void InitAstar(VVINT &maze);
std::list GetPath(Point &startPoint, Point &endPoint);
VVINT& GetMap() {return _maze;}
//关于交互
void AddPerson(const Person *person);
void MovePerson(const Point *start, const Point* target);
void DeletePerson(const Person *person);
bool IsPointCanreach(int px2, int py2) const;
private:
Point *FindPath(Point &startPoint, Point &endPoint);
Point *GetEndPoint(Point* endPoint);
std::vector GetSurroundPoints(VVint8& openCloseList, const Point *point) const;
bool IsPointCanreachTarget(int px1, int py1, int px2, int py2, bool isIgnoreCorner) const;
bool IsInList(VVint8& openCloseList, bool listType, Point *point) const;
void AddPointToOpenSet(VVint8& openCloseArray,Point *point);
void MoveOpenPointToClose(VVint8& openCloseArray,Point *point);
//计算FGH值
int CalcG(Point *temp_start, Point *point);
int CalcH(Point *point, Point *end);
int CalcF(Point *point);
private:
bool _isIgnoreCorner; //是否忽视拐角
int _height; //地图宽高
int _width;
VVINT _maze; //地图
MSetPoint _openSets; //开表集合
VVPPoint _points; //点集
};
#endif // !__ASTART_H__
#include "Astar.h"
#include "Person.h"
#include
const int COST1 = 10; //直移一格消耗
const int COST2 = 14; //斜移一格消耗
enum List_Type { CLOSE_LIST, OPEN_LIST };
const int direction[2][8] = { {-1,-1,-1,0,0,1,1,1},{-1,0,1,-1,1,-1,0,1} };
Astar::Astar(bool isIgnoreCorner) :_isIgnoreCorner(isIgnoreCorner)
{
}
Astar::~Astar()
{
for (auto &rows : _points)
for (auto &point : rows)
delete point;
}
void Astar::InitAstar(VVINT &maze)
{
_maze = std::move(maze);
_height = int(_maze.size());
_width = int(_maze[0].size());
_points = VVPPoint(_height, VPPoint(_width, 0));
for (int i = 0; i < _height; i++)
{
for (int j = 0; j < _width; j++)
{
//初始化点
_points[i][j] = new Point(i, j);
//预处理可展开方向 使用整形中的八位分别表示
for (int k = 0; k < 8; k++)
{
int x = i + direction[0][k];
int y = j + direction[1][k];
if (IsPointCanreachTarget(i, j, x, y, _isIgnoreCorner))
{
_maze[i][j] |= 1 << k; //使用低八位
//_maze[i][j] |= 1 << (k+8); //使用高八位
}
}
}
}
}
bool Astar::IsPointCanreach(int px2, int py2)const
{
if (px2<0 || px2>_height - 1
|| py2<0 || py2>_width - 1 //超出范围
|| _maze[px2][py2] >= 1 << 8) //障碍物
return false;
return true;
}
bool Astar::IsPointCanreachTarget(int px1, int py1, int px2, int py2, bool isIgnoreCorner) const
{
if (!IsPointCanreach(px2,py2))
return false;
if (abs(px1 - px2) + abs(py1 - py2) == 1) //非斜角可以
return true;
else
{
//斜对角要判断是否绊住
if (_maze[px1][py2] < 1 << 8 && _maze[px2][py1] < 1 << 8)
return true;
else
return isIgnoreCorner; //忽略拐角返回true表示可以到达 不忽略拐角返回false表示不可到达
}
}
int Astar::CalcG(Point *temp_start, Point *point)
{
int extraG = (abs(point->_x - temp_start->_x) + abs(point->_y - temp_start->_y)) == 1 ? COST1 : COST2;
return temp_start->_G + extraG;
}
int Astar::CalcH(Point *point, Point *end)
{
//采用欧几里得距离 对于可斜向移动的会更快找到目标
return int(sqrt((double)(end->_x - point->_x)*(double)(end->_x - point->_x) + (double)(end->_y - point->_y)*(double)(end->_y - point->_y))*COST1);
//使用曼哈顿距离 对于不能斜向移动的 减少计算量
//return (abs(point->_x - end->_x) + abs(point->_y - end->_y))*COST1;
}
int Astar::CalcF(Point *point)
{
return point->_G + point->_H;
}
void Astar::AddPerson(const Person * person)
{
int x, y;
person->GetPosition(x, y);
_maze[x][y] |= 1 << 8; //目标点设置不可移动
}
void Astar::MovePerson(const Point *start, const Point* target)
{
_maze[target->_x][target->_y] |= 1 << 8; //目标点设置不可移动
_maze[start->_x][start->_y] &= ~(1 << 8); //起始点设置可移动
}
void Astar::DeletePerson(const Person * person)
{
int x, y;
person->GetPosition(x, y);
_maze[x][y] &= ~(1 << 8); //起始点设置可移动
}
Point *Astar::FindPath(Point &startPoint, Point &endPoint)
{
VVint8 _openCloseArray(VVint8(_height, Vint8(_width / 4, 0)));
AddPointToOpenSet(_openCloseArray, _points[startPoint._x][startPoint._y]);
while (!_openSets.empty())
{
auto curPoint = *_openSets.begin(); //找到_F值最小的点
MoveOpenPointToClose(_openCloseArray, curPoint); //从开启列表中删除
//1,找到当前周围八个格中可以通过的格子
auto surroundPoints = GetSurroundPoints(_openCloseArray, curPoint);
for (auto &target : surroundPoints)
{
//2,对某一个格子,如果它不在开启列表中,加入到开启列表,设置当前格为其父节点,计算_F _G _H
if (!IsInList(_openCloseArray, OPEN_LIST, target))
{
target->_parent = curPoint;
target->_G = CalcG(curPoint, target);
target->_H = CalcH(target, &endPoint);
target->_F = CalcF(target);
AddPointToOpenSet(_openCloseArray, target);
}
//3,对某一个格子,它在开启列表中,计算_G值, 如果比原来的大, 就什么都不做, 否则设置它的父节点为当前点,并更新_G和_F
else
{
//从curPoint 到达target更近
int tempG = CalcG(curPoint, target);
if (tempG < target->_G)
{
target->_parent = curPoint;
target->_G = tempG;
target->_F = CalcF(target);
}
}
if (IsInList(_openCloseArray, OPEN_LIST, &endPoint))
return GetEndPoint(&endPoint); //返回列表里的节点指针,不要用原来传入的endpoint指针,因为发生了深拷贝
}
}
return NULL;
}
Point * Astar::GetEndPoint(Point * endPoint)
{
//从开表集合中获取终点
for (auto &x : _openSets)
if (*x == *endPoint)
return x;
return nullptr;
}
std::list Astar::GetPath(Point &startPoint, Point &endPoint)
{
Point *result = FindPath(startPoint, endPoint);
std::list path;
//返回路径,如果没找到路径,返回空链表
while (result)
{
path.push_front(result);
result = result->_parent;
}
// 清空临时开闭列表,防止重复执行GetPath导致结果异常
_openSets.clear();
//恢复点集的值
for (auto &rows : _points)
for (auto &point : rows)
{
point->_F = 0;
point->_H = 0;
point->_G = 0;
point->_parent = NULL;
}
return path;
}
bool Astar::IsInList(VVint8& _openCloseList, bool isOpenList, Point *point) const
{
//判断点是否在表中
if (isOpenList && _openCloseList[point->_x][point->_y / 4] & (1 << (point->_y % 4)))
return true;
if (!isOpenList && _openCloseList[point->_x][point->_y / 4] & (1 << ((point->_y % 4) + 4)))
return true;
return false;
}
void Astar::AddPointToOpenSet(VVint8& openCloseArray, Point * point)
{
//将点添加到开表中
_openSets.insert(point);
openCloseArray[point->_x][point->_y / 4] |= 1 << (point->_y % 4);
}
void Astar::MoveOpenPointToClose(VVint8& openCloseArray, Point * point)
{
//将在开表中的最小点移除 并添加到闭表中
_openSets.erase(_openSets.begin());
openCloseArray[point->_x][point->_y / 4] &= ~(1 << (point->_y % 4));
openCloseArray[point->_x][point->_y / 4] |= 1 << ((point->_y % 4) + 4);
}
std::vector Astar::GetSurroundPoints(VVint8& openCloseArray, const Point * point) const
{
std::vector surroundPoints;
//八方向搜索
for (int i = 0; i < 8; i++)
{
int x = point->_x + direction[0][i];
int y = point->_y + direction[1][i];
//先判断是否可展开 然后再查找是否在Close表中 可展开并且不在列表则加入到集合中
if (_maze[point->_x][point->_y] & 1 << i && !IsInList(openCloseArray, CLOSE_LIST, _points[x][y]))
surroundPoints.push_back(_points[x][y]);
}
return surroundPoints;
} 测试代码
#include "Astar.h"
#include
#include
using INT_TYPE = __int16;//使用十六位整形表示一个地图元素值 其中低八位用于表示可展开方向
using VVINT = std::vector>;
int main()
{
//测试地图
VVINT testMaze = {
{ 0, 0, X, X, X, X, X, X, X, X, X, X },
{ 0, 0, 0, X, X, 0, X, 0, 0, 0, 0, X },
{ X, 0, 0, X, X, 0, X, X, 0, 0, 0, X },
{ X, 0, 0, X, 0, 0, 0, 0, 0, X, X, X },
{ X, 0, X, X, X, X, 0, X, 0, 0, 0, X },
{ X, 0, X, 0, 0, 0, 0, X, 0, 0, X, X },
{ X, 0, X, 0, X, X, X, X, 0, 0, 0, X },
{ X, 0, X, 0, 0, 0, 0, X, 0, 0, 0, X },
{ X, 0, X, X, X, X, 0, X, 0, 0, 0, X },
{ X, 0, X, 0, 0, 0, 0, X, 0, 0, 0, X },
{ X, 0, 0, 0, 0, 0, 0, X, 0, 0, 0, X },
{ X, X, X, X, X, X, X, X, X, X, 0, 0 }
};
std::cout << "lets show the test map" << std::endl;
for (auto &row : testMaze)
{
for (auto &value : row)
{
if (value == 0)
std::cout << 0 << " ";
else
std::cout << "X" << " ";
}
std::cout << std::endl;
}
//设置起始和结束点
Point start(0, 0);
Point end(testMaze.size() - 1, testMaze[0].size() - 1);
bool isIgnoreCorner = false;
Astar astar(isIgnoreCorner);
astar.InitAstar(testMaze);
//A*算法找寻路径
std::list path;
path = astar.GetPath(start, end);
//测算耗时
//CalFunUseTime([&]() { path = astar.GetPath(start, end); });
std::cout << "show the path:" << std::endl;
auto map = astar.GetMap();
int stepCount = -1;
for (auto &p : path)
{
std::cout << '(' << p->_x << ',' << p->_y << ')' << std::endl;
map[p->_x][p->_y] = stepCount--;
}
//可视化显示
for (auto &row : map)
{
for (auto &value : row)
{
if (value < 0)
std::cout << std::setw(2) << -value << " ";
else if (value >= 1 << 8)
std::cout << "xx" << " ";
else
std::cout << " 0" << " ";
}
std::cout << std::endl;
}
std::cout << "wait to init the map..." << std::endl;
}