简易波形发生器通过单片机的Proteus仿真
利用数模转换器 PCF8591 实现简易波形发生器(可以输出正弦波、方波、三角波和锯齿波; 可以通过按键选择波形和频率;事先用 MATLAB 生成波形数据,点数越多,波形越逼真)。
PCF8951是一个单电源低功耗的8位CMOS数据采集器件,具有4路模拟输入,1路模拟输出,一个串行I2C总线接口用来与单片机通信。三个引脚A0,A1,A2,用于编程硬件地址,允许最多8个器件连接到I2C而不需要额外的电路。器件的地址,控制以及数据都是通过I2C总线来传输。其中引脚1,2,3,4是4路模拟输入,引脚5,6,7是I2C总线的硬件地址,引脚8为数字地,9脚和10脚是I2C总线的SDA和SCL。12脚是时钟选择引脚,高电平表示外部时钟输入,低电平表示使用内部时钟。14脚是基准源,15脚是DAC的模拟输出,16脚是供电电源VCC。
在实际应用中收到I2C通信本身速率的影响,输出波形的频率不能设置得太高,我在实物单片机中调试时发现设置的频率不能超过24Hz不然会程序会崩溃,仿真可以设置更高的频率。
使用方法:
按下向上键切换波形
按下回车键进入频率设置,输入数字再按回车后保存,如果不想保存按下ESC键退出设置。
起始时可能需要调整示波器才能正常显示波形。
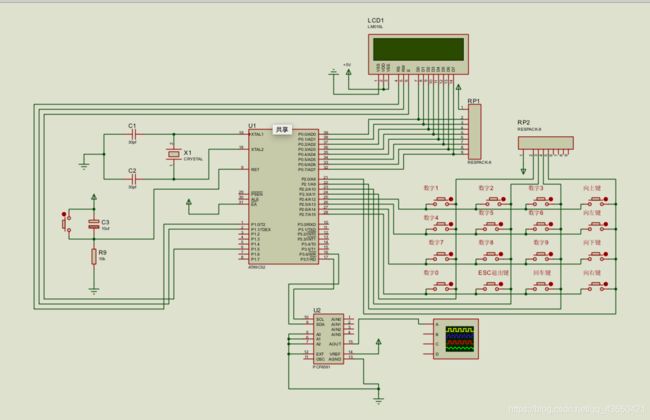
电路图画得不是很好,我当时还不知道可以简化连线的方法,这一方面可以改进。
然后是代码方面:
四个程序要放在同一个工程中,
1.简易信号发生器主函数.c
#include 2.I2C.c:用于I2C通信
#include 3.LCD1602.c:用于LCD1602显示驱动
#include 4.keyboard.c:键盘驱动程序
#include 运行结果:
10Hz正弦波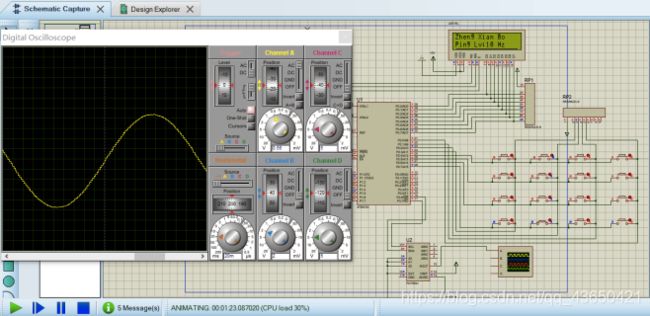
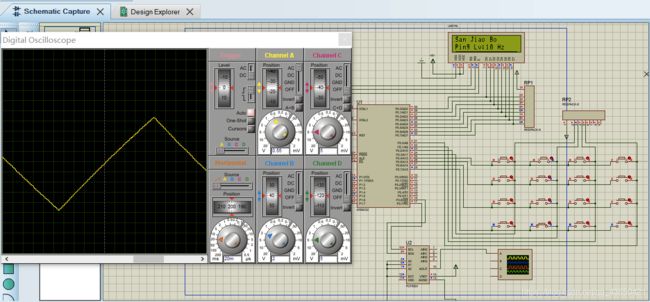
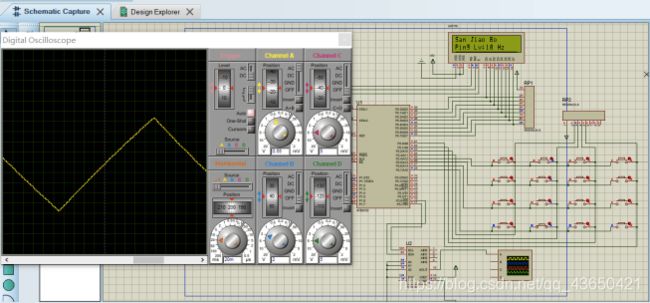
10Hz三角波
10Hz锯齿波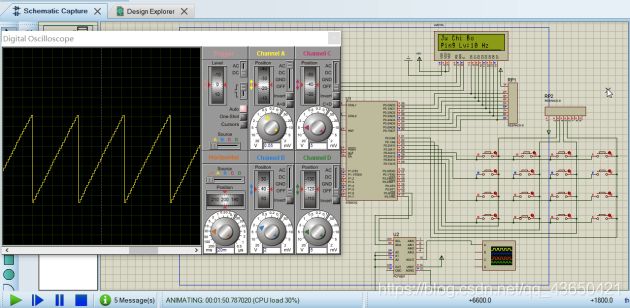
10Hz方波:注意方波要使用DC模式不然波形不理想。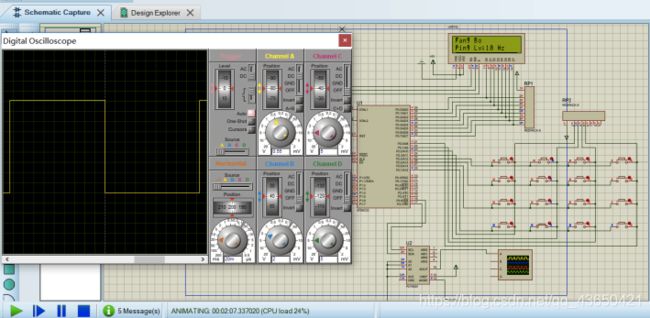
可以调整频率:
频率调为20Hz后三角波: