多传感器融合MSF算法源码阅读(二)
文章目录
- 1. 触发回调函数
- 2.状态预测
- 3.预测状态协方差
无人驾驶算法学习(六):多传感器融合MSF算法
多传感器融合MSF算法源码阅读(一)
1. 触发回调函数
imu模块主要其预测p,v,q的作用
ethzasl_msf/msf_core/include/msf_core/msf_IMUHandler_ROS.h查看
IMUHandler_ROS::IMUCallback,用来传播imu状态量(a,w)
void IMUCallback(const sensor_msgs::ImuConstPtr & msg)
{
static int lastseq = constants::INVALID_SEQUENCE;
if (static_cast(msg->header.seq) != lastseq + 1
&& lastseq != constants::INVALID_SEQUENCE) {
MSF_WARN_STREAM(
"msf_core: imu message drop curr seq:" << msg->header.seq
<< " expected: " << lastseq + 1);
}
lastseq = msg->header.seq;
msf_core::Vector3 linacc;
linacc << msg->linear_acceleration.x, msg->linear_acceleration.y, msg
->linear_acceleration.z;
msf_core::Vector3 angvel;
angvel << msg->angular_velocity.x, msg->angular_velocity.y, msg
->angular_velocity.z;
this->ProcessIMU(linacc, angvel, msg->header.stamp.toSec(),
msg->header.seq);
}
ethzasl_msf/msf_core/include/msf_core/msf_IMUHandler_ROS.h查看
IMUHandler_ROS::StateCallback,传入的参数sensor_fusion_comm::ExtEkfConstPtr,传播整个状态量(p,v,q,a,w)
void StateCallback(const sensor_fusion_comm::ExtEkfConstPtr & msg) {
static_cast&>(this->manager_)
.SetHLControllerStateBuffer(*msg);
// Get the imu values.
msf_core::Vector3 linacc;
linacc << msg->linear_acceleration.x, msg->linear_acceleration.y, msg
->linear_acceleration.z;
msf_core::Vector3 angvel;
angvel << msg->angular_velocity.x, msg->angular_velocity.y, msg
->angular_velocity.z;
int32_t flag = msg->flag;
// Make sure we tell the HL to ignore if data playback is on.
if (this->manager_.GetDataPlaybackStatus())
flag = sensor_fusion_comm::ExtEkf::ignore_state;
bool isnumeric = true;
if (flag == sensor_fusion_comm::ExtEkf::current_state) {
isnumeric = CheckForNumeric(
Eigen::Map >(msg->state.data()),
"before prediction p,v,q");
}
// Get the propagated states.
msf_core::Vector3 p, v;
msf_core::Quaternion q;
p = Eigen::Matrix(msg->state[0], msg->state[1],
msg->state[2]);
v = Eigen::Matrix(msg->state[3], msg->state[4],
msg->state[5]);
q = Eigen::Quaternion(msg->state[6], msg->state[7], msg->state[8],
msg->state[9]);
q.normalize();
bool is_already_propagated = false;
if (flag == sensor_fusion_comm::ExtEkf::current_state && isnumeric) {
is_already_propagated = true;
}
this->ProcessState(linacc, angvel, p, v, q, is_already_propagated,
msg->header.stamp.toSec(), msg->header.seq);
}
2.状态预测
ethzasl_msf/msf_core/include/msf_core/include/msf_core/implementation/msf_core_inl.h查看
IMUHandler_ROS类的父类IMUHandler的ProcessIMU
template
void MSF_Core::ProcessIMU(
const msf_core::Vector3& linear_acceleration,
const msf_core::Vector3& angular_velocity, const double& msg_stamp,
size_t /*msg_seq*/) {
if (!initialized_)
return;
msf_timing::DebugTimer timer_PropGetClosestState("PropGetClosestState");
if (it_last_IMU == stateBuffer_.GetIteratorEnd()) {
it_last_IMU = stateBuffer_.GetIteratorClosestBefore(msg_stamp);
}
shared_ptr lastState = it_last_IMU->second;
timer_PropGetClosestState.Stop();
msf_timing::DebugTimer timer_PropPrepare("PropPrepare");
if (lastState->time == constants::INVALID_TIME) {
MSF_WARN_STREAM_THROTTLE(
2, __FUNCTION__<<"ImuCallback: closest state is invalid\n");
return; // Early abort.
}
shared_ptr currentState(new EKFState_T);
currentState->time = msg_stamp;
// Check if this IMU message is really after the last one (caused by restarting
// a bag file).
if (currentState->time - lastState->time < -0.01 && predictionMade_) {
initialized_ = false;
predictionMade_ = false;
MSF_ERROR_STREAM(
__FUNCTION__<<"latest IMU message was out of order by a too large amount, "
"resetting EKF: last-state-time: " << msf_core::timehuman(lastState->time)
<< " "<< "current-imu-time: "<< msf_core::timehuman(currentState->time));
return;
}
static int seq = 0;
// Get inputs.
currentState->a_m = linear_acceleration;
currentState->w_m = angular_velocity;
currentState->noise_gyr = Vector3::Constant(usercalc_.GetParamNoiseGyr());
currentState->noise_acc = Vector3::Constant(usercalc_.GetParamNoiseAcc());
// Remove acc spikes (TODO (slynen): find a cleaner way to do this).
static Eigen::Matrix last_am =
Eigen::Matrix(0, 0, 0);
if (currentState->a_m.norm() > 50)
currentState->a_m = last_am;
else {
// Try to get the state before the current time.
if (lastState->time == constants::INVALID_TIME) {
MSF_WARN_STREAM(
"Accelerometer readings had a spike, but no prior state was in the "
"buffer to take cleaner measurements from");
return;
}
last_am = lastState->a_m;
}
if (!predictionMade_) {
if (lastState->time == constants::INVALID_TIME) {
MSF_WARN_STREAM("Wanted to compare prediction time offset to last state, "
"but no prior state was in the buffer to take cleaner measurements from");
return;
}
if (fabs(currentState->time - lastState->time) > 0.1) {
MSF_WARN_STREAM_THROTTLE(
2, "large time-gap re-initializing to last state\n");
typename StateBuffer_T::Ptr_T tmp = stateBuffer_.UpdateTime(
lastState->time, currentState->time);
time_P_propagated = currentState->time;
return; // // early abort // // (if timegap too big)
}
}
if (lastState->time == constants::INVALID_TIME) {
MSF_WARN_STREAM(
"Wanted to propagate state, but no valid prior state could be found in "
"the buffer");
return;
}
timer_PropPrepare.Stop();
msf_timing::DebugTimer timer_PropState("PropState");
//propagate state and covariance
PropagateState(lastState, currentState);
timer_PropState.Stop();
msf_timing::DebugTimer timer_PropInsertState("PropInsertState");
it_last_IMU = stateBuffer_.Insert(currentState);
timer_PropInsertState.Stop();
msf_timing::DebugTimer timer_PropCov("PropCov");
PropagatePOneStep();
timer_PropCov.Stop();
usercalc_.PublishStateAfterPropagation(currentState);
// Making sure we have sufficient states to apply measurements to.
if (stateBuffer_.Size() > 3)
predictionMade_ = true;
if (predictionMade_) {
// Check if we can apply some pending measurement.
HandlePendingMeasurements();
}
seq++;
}
ProcessIMU()中调用了PropagateState()函数:
ethzasl_msf/msf_core/include/msf_core/include/msf_core/implementation/msf_core_inl.h查看
template
void MSF_Core::PropagateState(shared_ptr& state_old,
shared_ptr& state_new) {
double dt = state_new->time - state_old->time;
// 将最新状态置为零
boost::fusion::for_each(state_new->statevars, msf_tmp::ResetState());
// 零传播:复制常量用于非传播状态。
boost::fusion::for_each(
state_new->statevars,
msf_tmp::CopyNonPropagationStates(*state_old));
Eigen::Matrix dv;
const Vector3 ew = state_new->w_m
- state_new->template Get();
const Vector3 ewold = state_old->w_m
- state_old->template Get();
const Vector3 ea = state_new->a_m
- state_new->template Get();
const Vector3 eaold = state_old->a_m
- state_old->template Get();
const Matrix4 Omega = OmegaMatJPL(ew);
const Matrix4 OmegaOld = OmegaMatJPL(ewold);
Matrix4 OmegaMean = OmegaMatJPL((ew + ewold) / 2);
// Zero order quaternion integration.
// cur_state.q_ = (Eigen::Matrix::Identity() +
// 0.5*Omega*dt)*StateBuffer_[(unsigned char)(idx_state_-1)].q_.coeffs();
// First order quaternion integration, this is kind of costly and may not add
// a lot to the quality of propagation...
int div = 1;
Matrix4 MatExp;
MatExp.setIdentity();
OmegaMean *= 0.5 * dt;
for (int i = 1; i < 5; i++) { // Can be made fourth order or less to save cycles.
div *= i;
MatExp = MatExp + OmegaMean / div;
OmegaMean *= OmegaMean;
}
// 第一个四元数积分矩阵
const Matrix4 quat_int =
MatExp + 1.0 / 48.0 * (Omega * OmegaOld - OmegaOld * Omega) * dt * dt;
// 第一次四元数积分
state_new->template Get().coeffs() = quat_int *
state_old->template Get().coeffs();
state_new->template Get().normalize();
dv = (state_new->template Get().toRotationMatrix() *
ea + state_old->template Get().toRotationMatrix() *
eaold) / 2;
state_new->template Get() =
state_old->template Get()
+ (dv - constants::GRAVITY) * dt;
state_new->template Get() =
state_old->template Get()
+ ((state_new->template Get()
+ state_old->template Get()) / 2 * dt);
}
- 算法流程图:

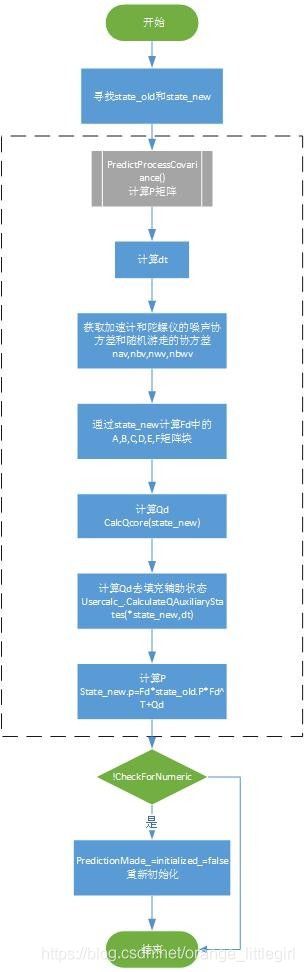
3.预测状态协方差
ethzasl_msf/msf_core/include/msf_core/implementation/msf_core_inl.h查看
PredictProcessCovariance()函数
注意:协方差是状态量的,msf使用的运动模型是误差状态运动模型的Fc,是关于误差状态导数的,状态量的状态转移矩阵需要做矩阵积分
template
void MSF_Core::PredictProcessCovariance(
shared_ptr& state_old, shared_ptr& state_new) {
double dt = state_new->time - state_old->time;
if (dt <= 0) {
MSF_WARN_STREAM_THROTTLE(
1, "Requested cov prop between two states that where "<w_m
- state_new->template Get();
const Vector3 ea = state_new->a_m
- state_new->template Get();
const Matrix3 a_sk = Skew(ea);
const Matrix3 w_sk = Skew(ew);
const Matrix3 eye3 = Eigen::Matrix::Identity();
const Matrix3 C_eq = state_new->template Get().toRotationMatrix();
const double dt_p2_2 = dt * dt * 0.5;
const double dt_p3_6 = dt_p2_2 * dt / 3.0;
const double dt_p4_24 = dt_p3_6 * dt * 0.25;
const double dt_p5_120 = dt_p4_24 * dt * 0.2;
const Matrix3 Ca3 = C_eq * a_sk;
const Matrix3 A = Ca3
* (-dt_p2_2 * eye3 + dt_p3_6 * w_sk - dt_p4_24 * w_sk * w_sk);
const Matrix3 B = Ca3
* (dt_p3_6 * eye3 - dt_p4_24 * w_sk + dt_p5_120 * w_sk * w_sk);
const Matrix3 D = -A;
const Matrix3 E = eye3 - dt * w_sk + dt_p2_2 * w_sk * w_sk;
const Matrix3 F = -dt * eye3 + dt_p2_2 * w_sk - dt_p3_6 * (w_sk * w_sk);
const Matrix3 C = Ca3 * F;
// Discrete error state propagation Matrix Fd according to:
// Stephan Weiss and Roland Siegwart.
// Real-Time Metric State Estimation for Modular Vision-Inertial Systems.
// IEEE International Conference on Robotics and Automation. Shanghai, China, 2011
typename EKFState_T::F_type& Fd = state_old->Fd;
enum {
idxstartcorr_p = msf_tmp::GetStartIndexInCorrection::value,
idxstartcorr_v = msf_tmp::GetStartIndexInCorrection::value,
idxstartcorr_q = msf_tmp::GetStartIndexInCorrection::value,
idxstartcorr_b_w = msf_tmp::GetStartIndexInCorrection::value,
idxstartcorr_b_a = msf_tmp::GetStartIndexInCorrection::value
};
Fd.template block<3, 3>(idxstartcorr_p, idxstartcorr_v) = dt * eye3;
Fd.template block<3, 3>(idxstartcorr_p, idxstartcorr_q) = A;
Fd.template block<3, 3>(idxstartcorr_p, idxstartcorr_b_w) = B;
Fd.template block<3, 3>(idxstartcorr_p, idxstartcorr_b_a) = -C_eq * dt_p2_2;
Fd.template block<3, 3>(idxstartcorr_v, idxstartcorr_q) = C;
Fd.template block<3, 3>(idxstartcorr_v, idxstartcorr_b_w) = D;
Fd.template block<3, 3>(idxstartcorr_v, idxstartcorr_b_a) = -C_eq * dt;
Fd.template block<3, 3>(idxstartcorr_q, idxstartcorr_q) = E;
Fd.template block<3, 3>(idxstartcorr_q, idxstartcorr_b_w) = F;
typename EKFState_T::Q_type& Qd = state_old->Qd;
CalcQCore(
dt, state_new->template Get(), ew, ea, nav, nbav,
nwv, nbwv, Qd);
// Call user Q calc to fill in the blocks of auxiliary states.
// TODO optim: make state Q-blocks map respective parts of Q using Eigen Map,
// avoids copy.
usercalc_.CalculateQAuxiliaryStates(*state_new, dt);
// Now copy the userdefined blocks to Qd.
boost::fusion::for_each(
state_new->statevars,
msf_tmp::CopyQBlocksFromAuxiliaryStatesToQ(Qd));
// TODO (slynen) Optim: Multiplication of F blockwise, using the fact that aux
// states have no entries outside their block.
state_new->P = Fd * state_old->P * Fd.transpose() + Qd;
// Set time for best cov prop to now.
time_P_propagated = state_new->time;
}
- 算法流程图: