IROS 2019部分论文整理1
Fast Time-optimal Avoidance of Moving Obstacles for High-Speed MAV Flight
摘要
Abstract—In this work, we propose a method to efficiently compute smooth, time-optimal trajectories for micro aerial vehicles (MAVs) evading a moving obstacle. Our approach first computes an n-dimensional trajectory from the start-to
an arbitrary target state including position, velocity and acceleration. It respects input- and state-constraints and is thus dynamically feasible. The trajectory is then efficiently checked for collisions, exploiting the piecewise polynomial formulation. If collisions occur, viastates are inserted into the trajectory to circumvent the obstacle and still maintain imeoptimality. These viastates are described by position, velocity, and acceleration. The evaluation shows that the computational demands of the proposed method are minimal such that obstacle avoidance can begin within few milliseconds. Optimality of generated trajectories, combined with the ability for frequent online re-planning from non-hover initial conditions, make the approach well suited for evasion of suddenly perceived obstacles during fast flight.
在本文中,我们提出了一个方法使得无人机有效地计算一条平滑的,时间最优的轨迹来躲避移动的障碍。我们的方法首先计算了一个从起点到任意目标状态的n维轨迹,包括位置,速度,加速度。它遵守了输入和状态约束,因此是动态可行的。这条轨迹利用分段多项式公式来有效地检查碰撞。如果有碰撞出现,通过在轨迹中插入中间状态(viastate)来避开障碍,同时保持时间最优性。这些中间状态(viastates)由位置、速度和加速度来描述。评估结果表明,该方法的计算需求很小,可以在几毫秒内开始避障。生成轨迹的最优性,结合从非悬停初始条件频繁在线重新规划的能力,使得该方法非常适合在快速飞行中躲避突然感知的障碍。
The code used in this work is open-source: http://www.ais.uni-bonn.de/videos/IROS_2019_Beul
Three contributions are:
- generation of trajectories targeting only partially defined target states
- fast computation of optimal trajectories that avoid a static or moving obstacle
- evaluation of our method in simulation including profiling of computational requirements
Visual-based Autonomous Driving Deployment from a Stochastic and Uncertainty-aware Perspective
摘要
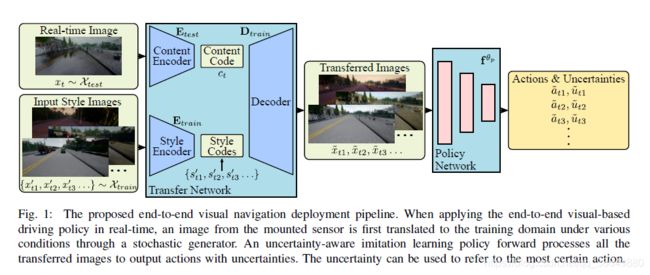
End-to-end visual-based imitation learning has been widely applied in autonomous driving. When deploying the trained visual-based driving policy, a deterministic command is usually directly applied without considering the uncertainty of the input data. Such kind of policies may bring dramatical damage when applied in the real world. In this paper, we follow the recent real-to-sim pipeline by translating the testing world image back to the training domain when using the trained policy. In the translating process, a stochastic generator is used to generate various images stylized under the training domain randomly or directionally. Based on those translated images, the trained uncertainty-aware imitation learning policy would output both the predicted action and the data uncertainty motivated by the aleatoric loss function. Through the uncertainty- aware imitation learning policy, we can easily choose the safest one with the lowest uncertainty among the generated images. Experiments in the Carla navigation benchmark show that our strategy outperforms previous methods, especially in dynamic environments.
端到端基于视觉的模仿学习在自动驾驶领域中已经得到广泛应用,在应用训练好的基于视觉的驾驶策略时,通常直接应用确定性指令,而不考虑输入数据的不确定性。这种策略在真实世界中可能会带来巨大的危险。在这篇文章中,我们使用了最近的真实-仿真(real-to-sim)流程即在使用训练策略时,将测试世界图像转换回训练域。基于转换后的图像,训练后的模仿学习策略会输出预测的动作和数据不确定性,该方法在动态环境中具有更加的表现。
Three main contributions:
- We transfer the real driving image back to diverse images stylized under the familiar training environment through a stochastic generator so that the decision is made through multiple alternate options.
- The uncertainty-aware imitation learning network provides a considerable way to make driving decisions, which improves the safety of autonomous driving, especially in dynamic environments.
- We explain the aleatoric uncertainty from the view of the noisily labelled data samples.
Maximum Likelihood Path Planning for Fast Aerial Maneuvers and Collision Avoidance
摘要
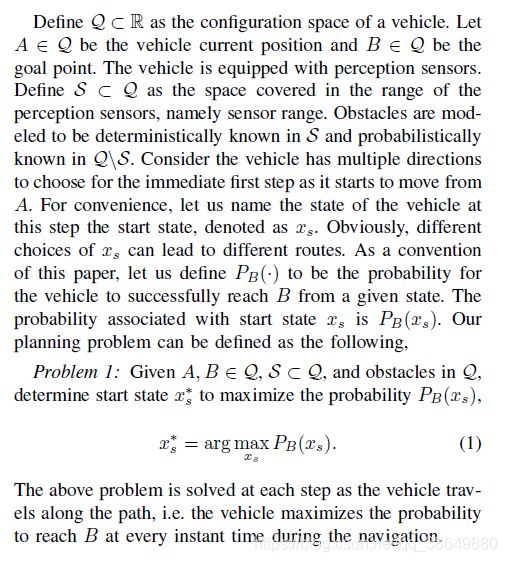
Typically, autonomous navigation through a complex environment requires a continuous search on a graph generated by a k-connected grid or a probabilistic scheme. As the vehicle travels, updating the graph with data from onboard sensors is expensive as is the search on the graph especially if the paths must be kinodynamically feasible.
常规方法是基于图的连续搜索,在飞行过程中,从机载传感器的数据中更新图和在图上搜索具有动态可行性的路径需付出昂贵的代价。
Our method models the environment differently in two separate regions. Obstacles are considered to be deterministically known within the sensor range and probabilistically known beyond the sensor range.
我们的方法对两部分区域进行了不同的建模,障碍物在传感器范围内被认为是确定性建模,在传感器之外范围的障碍物以概率性建模。
Instead of searching for the path with the lowest cost (typically the shortest path), the method maximizes the likelihood to reach the goal in determining the immediate next step for navigation.
与搜寻最低代价路径不同的是,这个方法在决定当前时刻的下一步导航点时,最大化到达目标的可能性。
问题定义
SuMa++: Efficient LiDAR-based Semantic SLAM
In this paper, we propose an extension of a recently published surfelbased mapping approach exploiting three-dimensional laser range scans by integrating semantic information to facilitate the mapping process. The semantic information is efficiently extracted by a fully convolutional neural network and rendered on a spherical projection of the laser range data.
Our approach exploits ideas from a modern LiDAR SLAM pipeline [2] and incorporates semantic information obtained from a semantic segmentation generated by a Fully Convolutional Neural Network (FCN) [21]. This allows us to generate high-quality semantic maps, while at the same time improve the geometry of the map and the quality of the odometry.
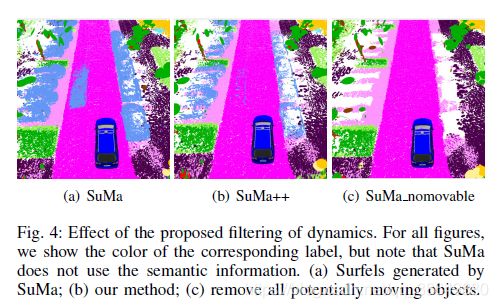
The main contribution of this paper is an approach to integrate semantics into a surfel-based map representation and a method to filter dynamic objects exploiting these semantic labels. (将语义引入surfel-based mapping后,对比纯surfel mapping有更好的动态性能.)
本文研究重点:In contrast to them, we focus on generating a semantic map with an abundance of semantic classes and using these semantics to filter outliers caused by dynamic objects (根据语义信息滤除动态目标), like moving vehicles and humans, to improve both mapping and odometry accuracy. (同时提高建图和里程计精度)

整个流程将里程计估计和语义分割两个部分进行整合,首先是将pointcloud传进RangeNet++生成原始语义图,然后使用flood-fill方法对原始语义图进行处理得到优化后的语义图。对世界模型和观测模型进行语义一致性检测来移除outliers,最后基于语义约束来完成ICP里程计估计。
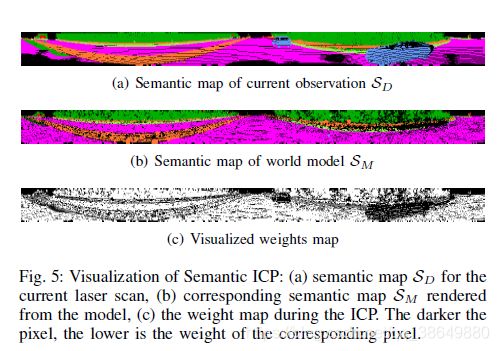
本文特别之处在于Filtering Dynamics using Semantics部分,在介绍了传统基于几何方法SLAM的缺点后,引出we filter dynamics by checking semantic consistency between the new observation S D {S_{D}} SD and the world model S M {S_{M}} SM, when we update the map.
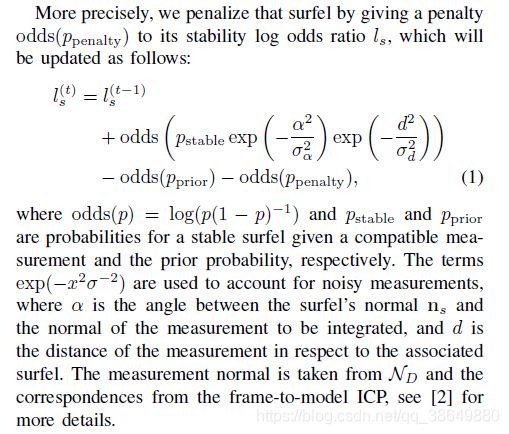
基于语义分割的点云结果进行ICP里程计估计,标准ICP问题构建与求解不详细展开。本文贡献点在于求解ICP时基于语义分割的结果考虑了动态物体的权重。
Reference:
[2] Efficient Surfel-Based SLAM using 3D Laser Range Data in Urban Environments.
[21] RangeNet++: Fast and Accurate LiDAR Semantic Segmentation.