维纳滤波推导
原文:https://blog.csdn.net/bluecol/article/details/46242355
在数学应用上,对于运动引起的图像模糊,最简单的方法是直接做逆滤波,但是逆滤波对加性噪声特别敏感,使得恢复的图像几乎不可用。最小均方差(维纳)滤波用来去除含有噪声的模糊图像,其目标是找到未污染图像的一个估计,使它们之间的均方差最小,可以去除噪声,同时清晰化模糊图像。
定义
给定一个系统
y(t)=h(t)∗x(t)+n(t)
y(t)=h(t)∗x(t)+n(t)
这里,∗∗是卷积符号
x(t)x(t)是在时间tt刻输入的信号(未知)
h(t)h(t)是一个线性时间不变系统的脉冲响应(已知)
n(t)n(t)是加性噪声,与x(t)x(t)不相关(未知)
y(t)y(t)是我们观察到的信号
我们的目标是找出这样的卷积函数g(t)g(t),这样我们可以如下得到估计的x(t)x(t):
x^(t)=g(t)∗y(t)
x^(t)=g(t)∗y(t)
这里x^(t)x^(t)是x(t)x(t)的最小均方差估计。
基于这种误差度量, 滤波器可以在频率域如下描述
G(f)=H∗(f)S(f)|H(f)|2S(f)+N(f)=H∗(f)|H(f)|2+N(f)/S(f)
G(f)=H∗(f)S(f)|H(f)|2S(f)+N(f)=H∗(f)|H(f)|2+N(f)/S(f)
这里:
G(f)G(f)和H(f)H(f)是gg和hh在频率域ff的傅里叶变换。
S(f)S(f)是输入信号x(t)x(t)的功率谱。
N(f)N(f)是噪声的n(t)n(t)的功率谱。
上标∗∗代表复数共轭。
滤波过程可以在频率域完成:
X^(f)=G(f)∗Y(f)
X^(f)=G(f)∗Y(f)
这里 X^(f)X^(f)是 x^(t)x^(t)的傅里叶变换,通过逆傅里叶变化可以得到去卷积后的结果x^(t)x^(t)。
解释
上面的式子可以改写成更为清晰的形式
G(f)=1H(f)⎡⎣⎢|H(f)|2|H(f)|2+N(f)S(f)⎤⎦⎥=1H(f)⎡⎣⎢|H(f)|2|H(f)|2+1SNR(f)⎤⎦⎥
G(f)=1H(f)[|H(f)|2|H(f)|2+N(f)S(f)]=1H(f)[|H(f)|2|H(f)|2+1SNR(f)]
这里H(f)H(f)是hh在频率域ff的傅里叶变换。SNR(f)=S(f)/N(f)SNR(f)=S(f)/N(f)是信号噪声比。当噪声为零时(即信噪比趋近于无穷),方括号内各项也就等于1,意味着此时刻维纳滤波也就简化成逆滤波过程。但是当噪声增加时,信噪比降低,方括号里面值也跟着降低。这说明,维纳滤波的带通频率依赖于信噪比。
推导
上面直接给出了维纳滤波的表达式,接下来介绍推导过程。
上面提到,维纳滤波是建立在最小均方差,可以如下表示:
e(f)=E|X(f)−X^(f)|2
e(f)=E|X(f)−X^(f)|2
这里EE是期望
如果我们替换表达式中的X^(f)X^(f),上面可以重新组合成
e(f)=E|X(f)−G(f)Y(f)|2=E|X(f)−G(f)[H(f)X(f)+V(f)]|2=E|[1−G(f)H(f)]X(f)−G(f)V(f)|2
e(f)=E|X(f)−G(f)Y(f)|2=E|X(f)−G(f)[H(f)X(f)+V(f)]|2=E|[1−G(f)H(f)]X(f)−G(f)V(f)|2
展开二次方,得到下式:
e(f)=[1−G(f)H(f)][1−G(f)H(f)]∗E|X(f)|2−[1−G(f)H(f)]G∗(f)E{X(f)V∗(f)}−G(f)[1−G(f)H(f)]∗E{V(f)X∗(f)}+G(f)G∗(f)E|V(f)|2
e(f)=[1−G(f)H(f)][1−G(f)H(f)]∗E|X(f)|2−[1−G(f)H(f)]G∗(f)E{X(f)V∗(f)}−G(f)[1−G(f)H(f)]∗E{V(f)X∗(f)}+G(f)G∗(f)E|V(f)|2
然而,我们假设噪声与信号独立无关,这样有
E{X(f)V∗(f)}=E{V(f)X∗(f)}=0
E{X(f)V∗(f)}=E{V(f)X∗(f)}=0
并且我们如下定义功率谱
S(f)=E|X(f)|2N(f)=E|V(f)|2
S(f)=E|X(f)|2N(f)=E|V(f)|2
这样我们有
e(f)=[1−G(f)H(f)][1−G(f)H(f)]∗S(f)+G(f)G∗(f)N(f)
e(f)=[1−G(f)H(f)][1−G(f)H(f)]∗S(f)+G(f)G∗(f)N(f)
为了得到最小值,我们对G(f)G(f)求导,令方程等于零。
d(f)dG(f)=G∗(f)N(f)−H(f)[1−G(f)H(f)]∗S(f)=0
d(f)dG(f)=G∗(f)N(f)−H(f)[1−G(f)H(f)]∗S(f)=0
由此最终推出维纳滤波器。
测试
Matlab自带了示例程序,如下
%Read image
I = im2double(imread('cameraman.tif'));
figure,subplot(2,3,1),imshow(I);
title('Original Image (courtesy of MIT)');
%Simulate a motion blur
LEN = 21;
THETA = 11;
PSF = fspecial('motion', LEN, THETA);
blurred = imfilter(I, PSF, 'conv', 'circular');
subplot(2,3,2),imshow(blurred);
title('Blurred Image');
%Restore the blurred image
wnr1 = deconvwnr(blurred, PSF, 0);
subplot(2,3,3),imshow(wnr1);
title('Restored Image');
%Simulate blur and noise
noise_mean = 0;
noise_var = 0.0001;
blurred_noisy = imnoise(blurred, 'gaussian', ...
noise_mean, noise_var);
subplot(2,3,4),imshow(blurred_noisy)
title('Simulate Blur and Noise')
%Restore the blurred and noisy image:First attempt
wnr2 = deconvwnr(blurred_noisy, PSF, 0);
subplot(2,3,5);imshow(wnr2);title('Restoration of Blurred, Noisy Image Using NSR = 0')
%Restore the Blurred and Noisy Image: Second Attempt
signal_var = var(I(:));
wnr3 = deconvwnr(blurred_noisy, PSF, noise_var / signal_var);
subplot(2,3,6),imshow(wnr3)
title('Restoration of Blurred, Noisy Image Using Estimated NSR');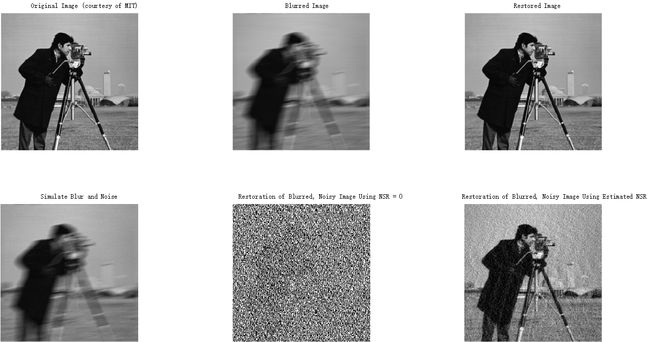
维纳滤波需要估计图像的信噪比(SNR)或者噪信比(NSR),信号的功率谱使用图像的方差近似估计,噪声分布是已知的。从第一排中可以看出,若无噪声,此时维纳滤波相当于逆滤波,恢复运动模糊效果是极好的。从第二排可以看出噪信比估计的准确性对图像影响比较大的,二排中间效果几乎不可用。
参考阅读
http://en.wikipedia.org/wiki/Wiener_deconvolution 英文维基百科
http://www.owlnet.rice.edu/~elec539/Projects99/BACH/proj2/wiener.html 莱斯大学的项目资料
转载保留声明
作者 日期 联系方式
风吹夏天 2015年5月29日 [email protected]
---------------------
作者:风吹夏天
来源:CSDN
原文:https://blog.csdn.net/bluecol/article/details/46242355
版权声明:本文为博主原创文章,转载请附上博文链接!