图像旋转变换的推导
转:图像旋转变换的推导
前面我们提到了图像的缩放变换,可以用矩阵乘法的形式来表达变换后的像素位置映射关系。
那么,对于旋转变换呢?我们可以同样将其想象成二维平面上矢量的旋转。如下图所示,矢量[x1,y1]逆时针旋转θθ度到了[x2,y2]。
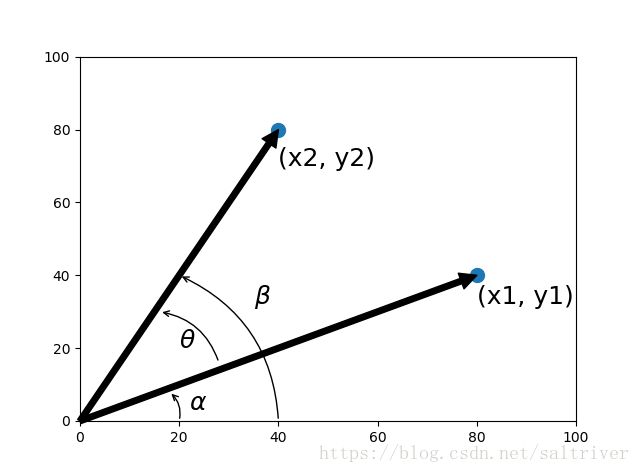
设定矢量的长度为s,根据坐标系定义,我们可以得到:
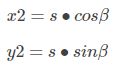
根据上面的图形,有:
![]()
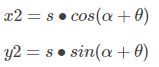
因此:
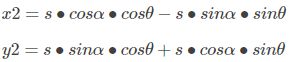
根据初中所学的三角函数公式:

于是:
由于:
因此:

于是,上式写成矩阵乘法的形式如下:
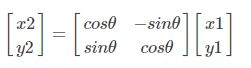
我们来看看一个图像逆时针旋转180度的情况。
import cv2
import numpy as np
import math
lenna = cv2.imread("lenna256.png", 0)
row, col = lenna.shape
lenna_rotation = np.zeros_like(lenna)
A = np.mat([[math.cos(math.pi), -math.sin(math.pi)], [math.sin(math.pi), math.cos(math.pi)]])
for r in range(row):
for l in range(col):
v = np.dot(A.I, np.array([r, l]).T)
lenna_rotation[r, l] = lenna[int(v[0, 0]), int(v[0, 1])]
cv2.imshow("lenna", lenna)
cv2.imshow("rotation", lenna_rotation)
cv2.waitKey()
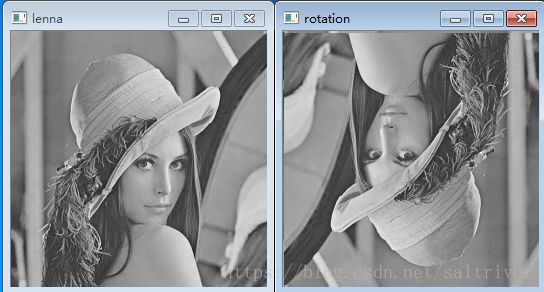
上面的图像宽度和高度是一样的,而且旋转角度是180度,比较特殊。在一般情况下,我们需要注意的是2点:一是旋转图像一般要将旋转中心设置在图像的中心点位置;二是图像旋转后,可能越过了原来的图像边界范围。这些都比较麻烦,好在opencv已经做好了这一切。
lenna = cv2.imread("lenna256.png", 0)
row, col = lenna.shape
M = cv2.getRotationMatrix2D((col // 2, row // 2), 70, 0.5)
dst = cv2.warpAffine(lenna, M, (col, row))
cv2.imshow("rotation", dst)
cv2.waitKey()
