busybox的编译使用及安装
busybox是什么?
(1)busybox是Linux上的一个应用程序(application),即只有一个ELF文件头。
(2)它整合了许多Linux上常用的工具和命令(utilities), 如rm, ls, gzip, tftp等。对于这些工具和命令,busybox中的实现可能不是最全的,但却是最常用的,因此它的特点就是短小精悍,特别适合对尺寸很敏感的嵌入式系统。
(3)busybox的官方网站是http://www.busybox.net/,在这里你可以找到与busybox相关的所有资料。
busybox编译和移植
busybox 的编译与Linux内核的编译过程类似。从http://www.busybox.net/downloads/ 下载最新的源码,解压后,通过以下几步,即可完成busybox的编译和移植:
(1)make xxxxxxconfig
busybox提供了几种配置:defconfig (缺省配置)、allyesconfig(最大配置)、 allnoconfig(最小配置),一般选择缺省配置即可。
这一步结束后,将生成.config
(2)make menuconfig
这一步是可选的,当你认为上述配置中还有不尽如意的地方,可以通过这一步进行微调,加入或去除某些命令。
这一步实际上是修改.config
(3)make CROSS_COMPILE=arm-linux-
这一步就是根据.config,生成busybox,当然你也可以指定其他的编译器, 如arm-linux-gnueabi-。("make CROSS_COMPILE="将用gcc编译PC机上运行的busybox.
busybox的使用
busybox的使用很简单,有以下三种方式:
(1) busybox后直接跟命令,如
busybox ls
busybox tftp
(2) 直接将busybox重命名,如
cp busybox tftp
cp busybox tar
然后再执行tftp, tar
(3)创建符号链接(symbolic link), 如
ln -s busybox rm
ln -s busybox mount
然后就可以执行rm,mount等
busybox的安装
以上三种方法中,第三种方法是最简洁最方便的,可是如果手工为busybox中每个命令都创建一个软链接,那是相当的费事。为此,busybox提供了一种自动方法:
在busybox编译成功后,接着执行“make install”,则会产生一个_install目录,其中包含了busybox及每个命令的软链接。以后只要将这个目录拷贝到目标平台上就可以了。
========================================================
BusyBox制作根文件系统(rootfs)
一、系统环境:
1、操作系统:Ubuntu12.04
2、交叉编译工具:arm-linux-gcc4.4.3
3、busybox源码包:busybox-1.25.0.tar.bz2
二、制作rootfs
1、建立rootfs目录
本人在/home/zxx下建立rootfs目录
#mkdir rootfs
#cd rootfs
#mkdir root home bin sbin etc dev usr lib tmp mnt sys proc //建立常用目录
#mkdir usr/lib usr/bin
#pwd
/home/zxx/rootfs
2、解压源码包:
#tar -jxvf busybox-1.25.0.tar.bz2
3、修改Makefile配置
进入busybox-1.25.0目录,修改Makefile文件如下:
ARCH ?= arm
CROSS_COMPILE ?= /usr/local/arm/4.4.3/bin/arm-linux- (与你自己主机的arm-linux-gcc安装目录一样)
4、编译BusyBox
#make menuconfig
选择Busybox Settings--->Build Options--->,选择[*] Build Busybox as a static binary(no shared libs)

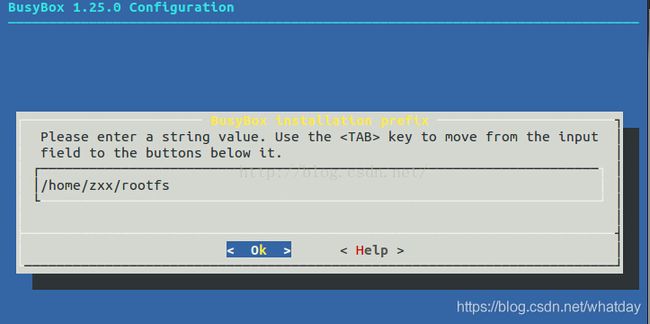
选择Busybox Settings ---> Installation Options --->BusyBox installation prefix(在里面输入BusyBox的安装目录,我是保存在/home/zxx/rootfs下)

Shells --->Choose your default shell (ash) ---> --- ash
保存并退出
5、编译安装
#make
#make install
6、把busybox源码目录下的etc的内容拷贝到rootfs目录下的etc下
# cd /home/zxx/rootfs/etc
# cp -a /home/zxx/Downloads/busybox-1.25.0/examples/bootfloppy/etc/* ./
7、从本机拷贝passwd、shadow、group文件
# cp /etc/passwd .
# cp /etc/shadow .
# cp /etc/group .
修改passwd文件,把第一行和最后一行的bash修改成ash。
8、修改初始化文件inittab和fstab
# vim inittab
::sysinit:/etc/init.d/rcS
::respawn:-/bin/sh
::restart:/sbin/init
tty2::askfirst:-/bin/sh
::ctrlaltdel:/bin/umount -a -r
::shutdown:/bin/umount -a -r
::shutdown:/sbin/swapoff –a
# vim fstab
proc /proc proc defaults 0 0
none /tmp ramfs defaults 0 0
mdev /dev ramfs defaults 0 0
sysfs /sys sysfs defaults 0 09、rootfs下lib的制作
将交叉编译环境下lib库拷贝到/rootfs/lib
#cd /home/zxx/rootfs/lib
#cp /usr/local/arm/4.4.3/arm-none-linux-gnueabi/sys-root/lib./
三、编译错误解决参考
1、make出现如下错误:
miscutils/nandwrite.c: In function 'nandwrite_main':
miscutils/nandwrite.c:151: error: 'MTD_FILE_MODE_RAW' undeclared (first use in this?function)
miscutils/nandwrite.c:151: error: (Each undeclared identifier is reported only once
miscutils/nandwrite.c:151: error: for each function it appears in.)
scripts/Makefile.build:197: recipe for target 'miscutils/nandwrite.o' failed
make[1]: *** [miscutils/nandwrite.o] Error 1
Makefile:742: recipe for target 'miscutils' failed
make: *** [miscutils] Error 2
解决办法:
MTD_FILE_MODE_RAW在/usr/include/mtd/mtd-abi.h中定义。将/usr/include/mtd/mtd-abi.h拷贝到busybox的include文件中。
#gedit miscutils/nandwrite.c
修改头文件如下:
#include "libbb.h"
#include "mtd-abi.h"
#include
编译可以通过。
2、继续make,出现如下错误:
util-linux/blkdiscard.c: In function 'blkdiscard_main':
util-linux/blkdiscard.c:72: error: 'BLKSECDISCARD' undeclared (first use in this function)
util-linux/blkdiscard.c:72: error: (Each undeclared identifier is reported only once
util-linux/blkdiscard.c:72: error: for each function it appears in.)
scripts/Makefile.build:197: recipe for target 'util-linux/blkdiscard.o' failed
make[1]: *** [util-linux/blkdiscard.o] Error 1
Makefile:742: recipe for target 'util-linux' failed
make: *** [util-linux] Error 2
解决办法:
BLKSECDISCARD在/usr/include/linux/fs.h中定义,方法如上所述,将/usr/include/linux/fs.h拷贝到busybox的include文件中linux下。
#gedit util-linux/blkdiscard.c
修改内容如下:
#include
编译通过。
到这里rootfs基本上已经制作出来,有些内容需要的,可根据自己rootfs的需要进行自己增加。最后将rootfs目录制作成镜像后,就可以烧写到开发板上了。
=========================================================
传统的嵌入式系统都是uboot+kernel+rootfs。其中最简单的rootfs就是ramfs+busybox+/dev + /etc + /lib。至于etc目录中的inittab和init.d/rcS这两个都是busybox中init程序分析的内容。如果本身没有busybox,其实也无所谓这两个脚本。
1、busybox就是普通的用户程序
建议同学们可以用objdump看一下busybox,不管是静态编译还是动态编译,busybox只是一个简单的类hello_world程序。
2、所有的命令都指向busybox
如果登录到嵌入式设备上,那么我们会发现其实所有命令指向的都是busybox这么一个程序。
3、第一个用户程序就是busybox
在kernel返回用户侧运行的第一个程序,即/bin/init或者/sbin/init,其本身运行的还是busybox程序。
4、返回用户侧后,第一个c函数不是init_main
之前说过,busybox就是普通的c代码,因此它的入口就是main函数、代码位于libbb目录下。只不过这个程序会判断argv[0]的数值,如果发现是init,那么会调用init_main,如果是cd,那么会调用cd_main,以此类推。
5、调试busybox
调试busybox有很多办法。a、调试的时候一般静态编译busybox;b、如果是自己添加的命令,只要gdb server+gdb调试就可以了;c、如果是系统自带命令,不确认系统是否调用busybox,可以用打印或者点灯的方法来解决;d、如果以上方法都不合适,可以自己写一个init程序代替busybox,android开机后的第一个用户程序就是自己写的,也没有用busybox,问题不大。大家平时使用较多的ubuntu,它的启动程序也不是busybox,一般也是由sysvinit+systemd一起完成的。
6、过分夸大的busybox
busybox只是rootfs的一个组成部分,没有busybox我们可以自己写一个简单的shell,这些问题都不大。特别是调试的时候,厘清drvier、busybox、script、rootfs问题的时候,常常需要我们自己手写init程序,这个时候如果对rootfs和busybox理解比较充分,调试就会变得很简单了。