- ROS学习笔记-roslaunch文件的编写&用sh脚本控制launch文件启动顺序
诗筱涵
ROS无人机-a-个人笔记
转载自:https://mp.weixin.qq.com/s?__biz=MzUyMTkxODQyOQ==&mid=2247484719&idx=1&sn=27b3a01c295ae256dc69d805fd5904ba&chksm=f9d2879dcea50e8b71b78d8b69750d282055173ea65494342e983088276859b7c4fe227f21f1&scene=
- ROS学习(5)可视化和调试工具一
敲代码的雪糕
ROSROS
文章目录前言一、调试ROS节点1、使用gdb调试器调试节点2、在节点启动时调用gdb调试器3、在节点启动时调用valgrind分析节点4、设置ROS节点core文件存储二、日志消息1.输出日志消息2.调试消息级别3.为特定节点配置调试消息级别4.消息命名5.按条件显示消息与过滤消息6.显示消息的方式7.使用rqt_console和rqt_logger_level在运行时修改调试级别总结前言ROS自
- 我的ROS学习笔记(四)
zenpluck
自动驾驶c++
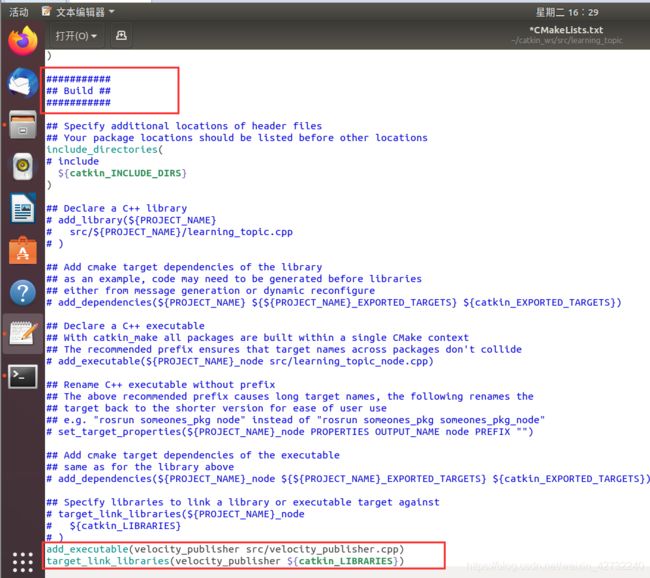
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档publisher程序代码学习前言一、包含消息类型声明二、创建发布者对象三、创建并填充消息对象四、发布消息五、消息发布循环1.节点是否停止工作的检查2.控制消息发布频率总结前言发布者程序包含了很多之前不懂的知识,刚开始也许只能复制粘贴代码来运行实例,但最终目的还是为了自己能够编写这些代码。因此,弄明白哪部分代码是什么意思非常有必要,不
- 黄金票据 --- kerberos学习记录
B1ackMa9ic
学习网络网络攻击模型安全
文章目录Kerberos协议是怎么工作的一、黄金票据利用条件利用步骤Kerberos协议是怎么工作的这里首先要搞懂几个概念:认证服务器(AuthenticationServer,AS):负责首次身份验证和颁发TGT(TicketGrantingTicket)给用户。用户通过AS向Kerberos服务器发送身份验证请求,并在验证通过后获取TGT。授权票证颁发服务器(TicketGrantingSer
- 移动机器人激光SLAM导航(五):Cartographer SLAM 篇
Robot_Yue
自主探索导航学习SLAMCartographer工程化调参
参考Cartographer官方文档Cartographer从入门到精通1.Cartographer安装1.1前置条件推荐在刚装好的Ubuntu16.04或Ubuntu18.04上进行编译ROS安装:ROS学习1:ROS概述与环境搭建1.2依赖库安装资源下载完解压并执行以下指令https://pan.baidu.com/s/1LWqZ4SOKn2sZecQUDDXXEw?pwd=j6cf$sudo
- ROS学习笔记14:Action通信
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(14/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:action通
- ROS学习笔记15:动态参数
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(15/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:cfg文件,r
- ROS学习笔记13:导航相关消息
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(13/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:导航相关消息1
- ROS学习笔记12:机器人导航实现(理论)
代码能跑就可以
学习笔记机器人vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(12/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:SLAM,地图
- ROS学习笔记10:rosbag与rqt
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(10/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:rosbag,
- ROS学习笔记8:TF坐标变换
代码能跑就可以
学习笔记vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(8/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:静态变换,动态变
- ROS学习笔记9:TF坐标变换实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(9/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:乌龟跟随要求产生
- ROS学习笔记4:通信机制实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(4/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:运动控制,位姿订
- ROS学习笔记6:launch文件
代码能跑就可以
学习笔记pythonc++服务器vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(6/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:launch文件
- ROS学习笔记2:话题通信
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(2/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:理论模型,发布,
- ROS学习笔记11——ROS中的重名问题
Simulink_
学习笔记机器人ROS
一、ros功能包重名——ros工作空间覆盖功能包重名时,会按照ROS_PACKAGE_PATH查找,在前的会优先执行。ROS会解析.bashrc文件,并生成ROS_PACKAGE_PATHROS包路径,即调用功能包的顺序,该变量中按照.bashrc中配置设置工作空间优先级,且ROS_PACKAGE_PATH中的值,和.bashrc的配置顺序相反(后配置的优先级更高)当然,功能包出现重名时,会出现安
- Linux-ROS学习之旅-话题编程(二)
Jesus-
ROSubuntu
##承接上一篇文章的知识,有下面的实例操作通过代码新生一个海龟,放置在(5,5)点,命名为turtle2,通过代码订阅turtle2的实时位置并打印在终端,控制turtle2实现旋转运动步骤:1.创建一个工作空间和一个功能包,功能包的依赖有rospyturtlesim在功能包里面的src文件创建.py文件用于编写代码,代码如下#!/usr/bin/envpython3#-*-coding:utf-
- Linux-ROS学习之旅(一)
Jesus-
ROS学习机器人自动驾驶
##本人使用的是双系统,noetic版本,学习ROS初衷是学习控制机械臂,具体下载方法见B站,观看的教程是古月居早年的教学视频,和ROS_wiki:ROS/Tutorials-ROSWiki##下一篇文章有具体的实例,但是所用方法与本篇不尽相同1.创建工作空间$mkdir-p~//src$cd~//src$catkin_init_workspace$cd~//$catkin_make$source
- ROS学习笔记(一)——ROS Melodic的安装
橙学长学路规
ROS学习笔记学习
目录文章目录声明前言安装步骤(1)添加镜像源(2)添加密钥(3)更新软件信息(4)安装(5)初始化rosdep(注意,这里十有八九会出错!!!)第一条指令第二条指令(6)设置环境变量:(7)安装rosinstall总结参考文章授权说明声明本文为小陈同学原创,本人是刚刚开始学习ROS的小白,在安装过程中遇到了很多坑,特此总结整个安装过程与踩过的坑,希望能够对您有所帮助,转载请阅读文末的“授权说明”,
- ROS学习笔记(一) ubuntu和ros的安装
万物皆可der
ubuntulinux
##声明:这里只为大家提供一个思路,细节操作请大家可以百度或者在csdn上搜索关键字,然后寻找具体操作Ubuntu安装安装Ubuntu我弄了一周时间,所以不断踩坑不断试坑,总结出一下经验,供大家参考。1.Ubuntu安装有两种方式。第一种是利用虚拟机安装Ubuntu(这种方法比较简单如果专业做机器人方面的话,建议用第二种)。①过程文字描述:进入Windows虚拟机|WorkstationPro|V
- ROS学习笔记(一)—— 基础概览
zxxRobot
Ros
1.ros简介1.1catkin工作空间与编译系统文件列表查看工具treeshellsudoaptinstalltreetree#显示当前文件夹树状图treetree-L1#显示一级目录工作空间:存放工程开发相关文件的文件夹。源文件空间:src文件夹,放置功能包。编译空间:build文件夹,c++编译过程中产生的中间文件。基本不用关心。开发空间:devel文件夹,保存编译后生成的可执行文件。安装空
- ROS学习笔记8——实现ROS通信时的常用命令
Simulink_
学习笔记机器人linux人工智能
机器人系统中启动的节点少则几个,多则十几个、几十个,不同的节点名称各异,通信时使用话题、服务、消息、参数等等都各不相同,一个显而易见的问题是:当需要自定义节点和其他某个已经存在的节点通信时,如何获取对方的话题、以及消息载体的格式呢?ROS提供了一些实用的命令行工具,可以用于获取不同节点的各类信息。这边总结介绍了一些常用命令:rosnode:操作节点rostopic:操作话题rosservice:操
- ROS学习笔记6——ROS通信机制2(服务通信)
Simulink_
学习笔记机器人linux人工智能
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即:一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。用于偶然的、对时时性有要求、有一定逻辑处理需求的数据传输场景。一、服务通信理论模型图二、角色服务通信较之于话题通信更简单些,理论模型如上图所示,该模型中涉及到三个角色:ROSmaster(管理者)Server(服务端)Client(
- ROS学习笔记1——用ros输出helloworld
Simulink_
学习笔记机器人
一、创建ROS工作空间mkdir-pxxx_ws/src(必须得有src)cdxxx_wscatkin_make二、启动vscode进入工作空间,启动vscodecode.三、快捷键编译ros快捷键ctrl+shift+B调用编译,点击catkin_make:build后面的小齿轮修改.vscode/tasks.json文件{"version":"2.0.0","tasks":[{"label":
- ROS学习笔记4——ROS通信机制(话题通信)
Simulink_
学习笔记机器人人工智能
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。一般用于不断更新的、少逻辑处理的数据传输场景。以相机信息的采集处理为例,在ROS中有一个节点需要时时的发布当前相机采集到的数据,另一个节点会订阅并解析相机数据。一、话题通信理论模型图二、角色话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色::ROSMast
- ROS学习笔记5——话题通信自定义msg
Simulink_
学习笔记机器人人工智能linux
在ROS通信协议中,数据载体是一个较为重要组成部分,ROS中通过std_msgs封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty....但是,这些数据一般只包含一个data字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如:相机的信息...std_msgs由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型。ROS中还有
- ROS学习笔记10——自定义源文件调用
Simulink_
学习笔记机器人ROS
调用自定义源文件的时候需要配置cmakelists文件,刚学感觉还挺繁琐,用一个小案例记录一下。1、随便写个头文件在功能包的include/功能包名目录下创建一个头文件记得在.vscode下c_cpp_properties.json的includepath属性中把路径加进去#ifndef_HELLO_H#define_HELLO_Hnamespacehello_ns{classMyHello{pu
- (无人机方向)ros学习之路ROS 机器人系统仿真_导航仿真概述
会变身的火娃
ros学习记录无人机机器人学习
系列文章目录一:导航仿真概述导航是机器人系统中最重要的模块之一,比如现在较为流行的服务型室内机器人,就是依赖于机器人导航来实现室内自主移动的,本章主要就是介绍仿真环境下的导航实现,主要内容有:导航相关概念导航实现:机器人建图(SLAM)、地图服务、定位、路径规划…以可视化操作为主。导航消息:了解地图、里程计、雷达、摄像头等相关消息格式。预期达成的学习目标:了解导航模块中的组成部分以及相关概念能够在
- ROS学习笔记16:机器人系统建模与仿真
蓝黑艾伦
ROS编程技术机器人学习
一、概述:1.机器人系统仿真:是通过计算机对实体机器人系统进行模拟的技术,在ROS中,仿真实现涉及的内容主要有三:对机器人建模(URDF)、创建仿真环境(Gazebo)以及感知环境(Rviz)等系统性实现。(1)仿真优势:低成本、高效、高安全性。(2)仿真缺陷:仿真器所使用的物理引擎目前还不能够完全精确模拟真实世界的物理情况;仿真器构建的是关节驱动器(电机&齿轮箱)、传感器与信号通信的绝对理想情况
- ROS学习笔记9——ROS三种通信机制的比较
Simulink_
学习笔记机器人
三种通信机制中,参数服务器是一种数据共享机制,可以在不同的节点之间共享数据,话题通信与服务通信是在不同的节点之间传递数据的,三者是ROS中最基础也是应用最为广泛的通信机制。这其中,话题通信和服务通信有一定的相似性也有本质上的差异,在此将二者做一下简单比较:二者的实现流程是比较相似的,都是涉及到四个要素:要素1:消息的发布方/客户端(Publisher/Client)要素2:消息的订阅方/服务端(S
- 多线程编程之存钱与取钱
周凡杨
javathread多线程存钱取钱
生活费问题是这样的:学生每月都需要生活费,家长一次预存一段时间的生活费,家长和学生使用统一的一个帐号,在学生每次取帐号中一部分钱,直到帐号中没钱时 通知家长存钱,而家长看到帐户还有钱则不存钱,直到帐户没钱时才存钱。
问题分析:首先问题中有三个实体,学生、家长、银行账户,所以设计程序时就要设计三个类。其中银行账户只有一个,学生和家长操作的是同一个银行账户,学生的行为是
- java中数组与List相互转换的方法
征客丶
JavaScriptjavajsonp
1.List转换成为数组。(这里的List是实体是ArrayList)
调用ArrayList的toArray方法。
toArray
public T[] toArray(T[] a)返回一个按照正确的顺序包含此列表中所有元素的数组;返回数组的运行时类型就是指定数组的运行时类型。如果列表能放入指定的数组,则返回放入此列表元素的数组。否则,将根据指定数组的运行时类型和此列表的大小分
- Shell 流程控制
daizj
流程控制if elsewhilecaseshell
Shell 流程控制
和Java、PHP等语言不一样,sh的流程控制不可为空,如(以下为PHP流程控制写法):
<?php
if(isset($_GET["q"])){
search(q);}else{// 不做任何事情}
在sh/bash里可不能这么写,如果else分支没有语句执行,就不要写这个else,就像这样 if else if
if 语句语
- Linux服务器新手操作之二
周凡杨
Linux 简单 操作
1.利用关键字搜寻Man Pages man -k keyword 其中-k 是选项,keyword是要搜寻的关键字 如果现在想使用whoami命令,但是只记住了前3个字符who,就可以使用 man -k who来搜寻关键字who的man命令 [haself@HA5-DZ26 ~]$ man -k
- socket聊天室之服务器搭建
朱辉辉33
socket
因为我们做的是聊天室,所以会有多个客户端,每个客户端我们用一个线程去实现,通过搭建一个服务器来实现从每个客户端来读取信息和发送信息。
我们先写客户端的线程。
public class ChatSocket extends Thread{
Socket socket;
public ChatSocket(Socket socket){
this.sock
- 利用finereport建设保险公司决策分析系统的思路和方法
老A不折腾
finereport金融保险分析系统报表系统项目开发
决策分析系统呈现的是数据页面,也就是俗称的报表,报表与报表间、数据与数据间都按照一定的逻辑设定,是业务人员查看、分析数据的平台,更是辅助领导们运营决策的平台。底层数据决定上层分析,所以建设决策分析系统一般包括数据层处理(数据仓库建设)。
项目背景介绍
通常,保险公司信息化程度很高,基本上都有业务处理系统(像集团业务处理系统、老业务处理系统、个人代理人系统等)、数据服务系统(通过
- 始终要页面在ifream的最顶层
林鹤霄
index.jsp中有ifream,但是session消失后要让login.jsp始终显示到ifream的最顶层。。。始终没搞定,后来反复琢磨之后,得到了解决办法,在这儿给大家分享下。。
index.jsp--->主要是加了颜色的那一句
<html>
<iframe name="top" ></iframe>
<ifram
- MySQL binlog恢复数据
aigo
mysql
1,先确保my.ini已经配置了binlog:
# binlog
log_bin = D:/mysql-5.6.21-winx64/log/binlog/mysql-bin.log
log_bin_index = D:/mysql-5.6.21-winx64/log/binlog/mysql-bin.index
log_error = D:/mysql-5.6.21-win
- OCX打成CBA包并实现自动安装与自动升级
alxw4616
ocxcab
近来手上有个项目,需要使用ocx控件
(ocx是什么?
http://baike.baidu.com/view/393671.htm)
在生产过程中我遇到了如下问题.
1. 如何让 ocx 自动安装?
a) 如何签名?
b) 如何打包?
c) 如何安装到指定目录?
2.
- Hashmap队列和PriorityQueue队列的应用
百合不是茶
Hashmap队列PriorityQueue队列
HashMap队列已经是学过了的,但是最近在用的时候不是很熟悉,刚刚重新看以一次,
HashMap是K,v键 ,值
put()添加元素
//下面试HashMap去掉重复的
package com.hashMapandPriorityQueue;
import java.util.H
- JDK1.5 returnvalue实例
bijian1013
javathreadjava多线程returnvalue
Callable接口:
返回结果并且可能抛出异常的任务。实现者定义了一个不带任何参数的叫做 call 的方法。
Callable 接口类似于 Runnable,两者都是为那些其实例可能被另一个线程执行的类设计的。但是 Runnable 不会返回结果,并且无法抛出经过检查的异常。
ExecutorService接口方
- angularjs指令中动态编译的方法(适用于有异步请求的情况) 内嵌指令无效
bijian1013
JavaScriptAngularJS
在directive的link中有一个$http请求,当请求完成后根据返回的值动态做element.append('......');这个操作,能显示没问题,可问题是我动态组的HTML里面有ng-click,发现显示出来的内容根本不执行ng-click绑定的方法!
- 【Java范型二】Java范型详解之extend限定范型参数的类型
bit1129
extend
在第一篇中,定义范型类时,使用如下的方式:
public class Generics<M, S, N> {
//M,S,N是范型参数
}
这种方式定义的范型类有两个基本的问题:
1. 范型参数定义的实例字段,如private M m = null;由于M的类型在运行时才能确定,那么我们在类的方法中,无法使用m,这跟定义pri
- 【HBase十三】HBase知识点总结
bit1129
hbase
1. 数据从MemStore flush到磁盘的触发条件有哪些?
a.显式调用flush,比如flush 'mytable'
b.MemStore中的数据容量超过flush的指定容量,hbase.hregion.memstore.flush.size,默认值是64M 2. Region的构成是怎么样?
1个Region由若干个Store组成
- 服务器被DDOS攻击防御的SHELL脚本
ronin47
mkdir /root/bin
vi /root/bin/dropip.sh
#!/bin/bash/bin/netstat -na|grep ESTABLISHED|awk ‘{print $5}’|awk -F:‘{print $1}’|sort|uniq -c|sort -rn|head -10|grep -v -E ’192.168|127.0′|awk ‘{if($2!=null&a
- java程序员生存手册-craps 游戏-一个简单的游戏
bylijinnan
java
import java.util.Random;
public class CrapsGame {
/**
*
*一个简单的赌*博游戏,游戏规则如下:
*玩家掷两个骰子,点数为1到6,如果第一次点数和为7或11,则玩家胜,
*如果点数和为2、3或12,则玩家输,
*如果和为其它点数,则记录第一次的点数和,然后继续掷骰,直至点数和等于第一次掷出的点
- TOMCAT启动提示NB: JAVA_HOME should point to a JDK not a JRE解决
开窍的石头
JAVA_HOME
当tomcat是解压的时候,用eclipse启动正常,点击startup.bat的时候启动报错;
报错如下:
The JAVA_HOME environment variable is not defined correctly
This environment variable is needed to run this program
NB: JAVA_HOME shou
- [操作系统内核]操作系统与互联网
comsci
操作系统
我首先申明:我这里所说的问题并不是针对哪个厂商的,仅仅是描述我对操作系统技术的一些看法
操作系统是一种与硬件层关系非常密切的系统软件,按理说,这种系统软件应该是由设计CPU和硬件板卡的厂商开发的,和软件公司没有直接的关系,也就是说,操作系统应该由做硬件的厂商来设计和开发
- 富文本框ckeditor_4.4.7 文本框的简单使用 支持IE11
cuityang
富文本框
<html xmlns="http://www.w3.org/1999/xhtml">
<head>
<meta http-equiv="Content-Type" content="text/html; charset=UTF-8" />
<title>知识库内容编辑</tit
- Property null not found
darrenzhu
datagridFlexAdvancedpropery null
When you got error message like "Property null not found ***", try to fix it by the following way:
1)if you are using AdvancedDatagrid, make sure you only update the data in the data prov
- MySQl数据库字符串替换函数使用
dcj3sjt126com
mysql函数替换
需求:需要将数据表中一个字段的值里面的所有的 . 替换成 _
原来的数据是 site.title site.keywords ....
替换后要为 site_title site_keywords
使用的SQL语句如下:
updat
- mac上终端起动MySQL的方法
dcj3sjt126com
mysqlmac
首先去官网下载: http://www.mysql.com/downloads/
我下载了5.6.11的dmg然后安装,安装完成之后..如果要用终端去玩SQL.那么一开始要输入很长的:/usr/local/mysql/bin/mysql
这不方便啊,好想像windows下的cmd里面一样输入mysql -uroot -p1这样...上网查了下..可以实现滴.
打开终端,输入:
1
- Gson使用一(Gson)
eksliang
jsongson
转载请出自出处:http://eksliang.iteye.com/blog/2175401 一.概述
从结构上看Json,所有的数据(data)最终都可以分解成三种类型:
第一种类型是标量(scalar),也就是一个单独的字符串(string)或数字(numbers),比如"ickes"这个字符串。
第二种类型是序列(sequence),又叫做数组(array)
- android点滴4
gundumw100
android
Android 47个小知识
http://www.open-open.com/lib/view/open1422676091314.html
Android实用代码七段(一)
http://www.cnblogs.com/over140/archive/2012/09/26/2611999.html
http://www.cnblogs.com/over140/arch
- JavaWeb之JSP基本语法
ihuning
javaweb
目录
JSP模版元素
JSP表达式
JSP脚本片断
EL表达式
JSP注释
特殊字符序列的转义处理
如何查找JSP页面中的错误
JSP模版元素
JSP页面中的静态HTML内容称之为JSP模版元素,在静态的HTML内容之中可以嵌套JSP
- App Extension编程指南(iOS8/OS X v10.10)中文版
啸笑天
ext
当iOS 8.0和OS X v10.10发布后,一个全新的概念出现在我们眼前,那就是应用扩展。顾名思义,应用扩展允许开发者扩展应用的自定义功能和内容,能够让用户在使用其他app时使用该项功能。你可以开发一个应用扩展来执行某些特定的任务,用户使用该扩展后就可以在多个上下文环境中执行该任务。比如说,你提供了一个能让用户把内容分
- SQLServer实现无限级树结构
macroli
oraclesqlSQL Server
表结构如下:
数据库id path titlesort 排序 1 0 首页 0 2 0,1 新闻 1 3 0,2 JAVA 2 4 0,3 JSP 3 5 0,2,3 业界动态 2 6 0,2,3 国内新闻 1
创建一个存储过程来实现,如果要在页面上使用可以设置一个返回变量将至传过去
create procedure test
as
begin
decla
- Css居中div,Css居中img,Css居中文本,Css垂直居中div
qiaolevip
众观千象学习永无止境每天进步一点点css
/**********Css居中Div**********/
div.center {
width: 100px;
margin: 0 auto;
}
/**********Css居中img**********/
img.center {
display: block;
margin-left: auto;
margin-right: auto;
}
- Oracle 常用操作(实用)
吃猫的鱼
oracle
SQL>select text from all_source where owner=user and name=upper('&plsql_name');
SQL>select * from user_ind_columns where index_name=upper('&index_name'); 将表记录恢复到指定时间段以前
- iOS中使用RSA对数据进行加密解密
witcheryne
iosrsaiPhoneobjective c
RSA算法是一种非对称加密算法,常被用于加密数据传输.如果配合上数字摘要算法, 也可以用于文件签名.
本文将讨论如何在iOS中使用RSA传输加密数据. 本文环境
mac os
openssl-1.0.1j, openssl需要使用1.x版本, 推荐使用[homebrew](http://brew.sh/)安装.
Java 8
RSA基本原理
RS