【实战+源码】RGB-D移动抓取服务机器人(四)——完结篇(ROS机器人、系统设计、运动规划、目标定位)
毕业设计已经完成三个多月了,四月底答辩结束,上周办完离校手续!善始善终,最后一篇结束把这个题目告一段落!
完整代码github托管地址:https://github.com/pengxinyi-up/mobile-grab-Robot
目录
一、往期回顾
二、机器人系统设计
1、ROS机器人(仿真+实物)
2、模型建立及仿真场景
3、硬件连接及实物图
4、系统结构
三、算法说明
1、Gmapping粒子滤波建图
2、Amcl自适应蒙特卡洛定位
3、Dijkstra和DWA路径规划
4、目标识别定位
5、规划抓取
四、演示实验
1、实验流程
2、地图建立
3、识别抓取
4、演示视频
五、总结
一、往期回顾
第一篇分享了移动移动机器人手眼抓取系统的准备工作
第二篇分享了人脸识别功能包face_recongnition的使用
第三篇分享了3D目标识别定位的相关开源方法功能包
本篇文章将补充说明一下相关算法、系统设计方法
二、机器人系统设计
1、ROS机器人(仿真+实物)
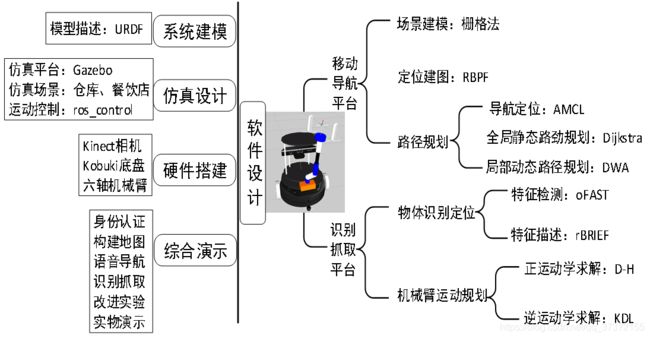
2、模型建立及仿真场景

3、硬件连接及实物图

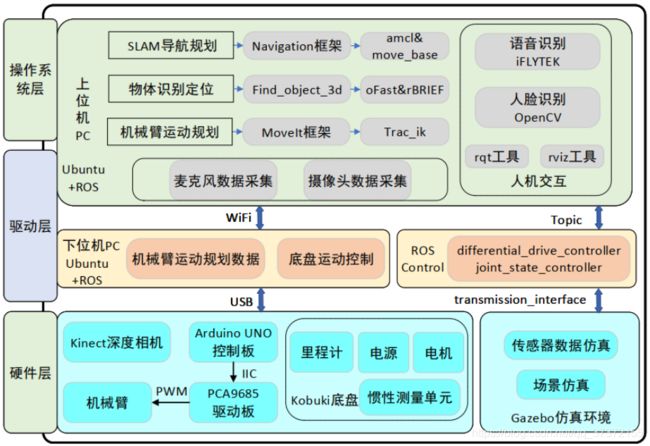
4、系统结构
三、算法说明
1、Gmapping粒子滤波建图
https://zhuanlan.zhihu.com/p/57566566
https://blog.csdn.net/liuyanpeng12333/article/details/81946841
2、Amcl自适应蒙特卡洛定位
算法分析:
https://blog.csdn.net/weixin_40114832/article/details/78322034
https://blog.csdn.net/chenxingwangzi/article/details/50038413
3、Dijkstra和DWA路径规划
Dijkstra:
https://www.luogu.com.cn/blog/wym483739/xue-tu-lun-ni-zhen-di-liao-xie-zui-duan-lu-ma-post
https://blog.csdn.net/heroacool/article/details/51014824
https://www.cnblogs.com/biyeymyhjob/archive/2012/07/31/2615833.html
DWA:
https://blog.csdn.net/heyijia0327/article/details/44983551
4、目标识别定位
ORB算法的中文解释:https://www.cnblogs.com/ronny/p/4083537.html
BRIEF原理:https://www.cnblogs.com/ronny/p/4081362.html
Harris角:https://blog.csdn.net/qq_29828623/article/details/52403562
5、规划抓取
(1)正运动学FK
(2)逆运动学IK
牛顿收敛法:
https://wenku.baidu.com/view/6d89a44c4afe04a1b171de63.html
SQP二次序列规划非线性优化方法:
https://wenku.baidu.com/view/30126cd249649b6648d7479f.html
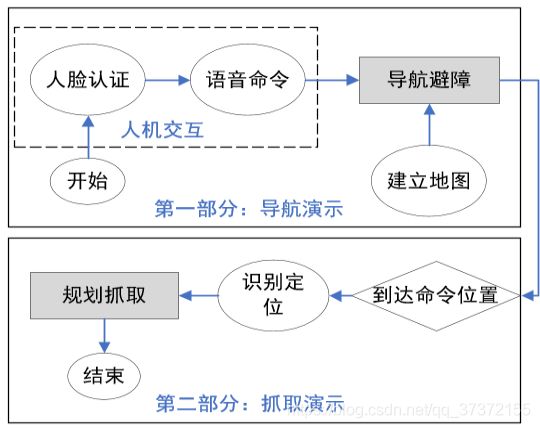
四、演示实验
1、实验流程
2、地图建立

3、识别抓取

4、演示视频
ROS移动抓取机器人
五、总结
总体来说,没有什么创新,功能的简单复现,还有许多不足之处!我想当把问题描述清楚的时候,解决办法也会清晰!

许多内容直接取自论文,担心查重的问题,所以等到现在收尾!如果有人感兴趣代码随后放到GitHub!
入坑越来越深,硕士阶段继续gank!
【系列文章】
【实战+源码】基于RGB-D(深度视觉)的具有机械臂抓取功能的自主规划移动服务机器人的设计与实现(一)——准备工作
实战+源码】基于RGB-D(深度视觉)的具有机械臂抓取功能的自主规划移动服务机器人的设计与实现(二)——人脸识别(face recongnition))
【实战+源码】RGB-D移动抓取服务机器人(三)——3D目标识别定位(相机标定、ORK、linemod、find_object_2d/3d)
【实战+源码】RGB-D移动抓取服务机器人(四)——完结篇(ROS机器人、系统设计、运动规划、目标定位)