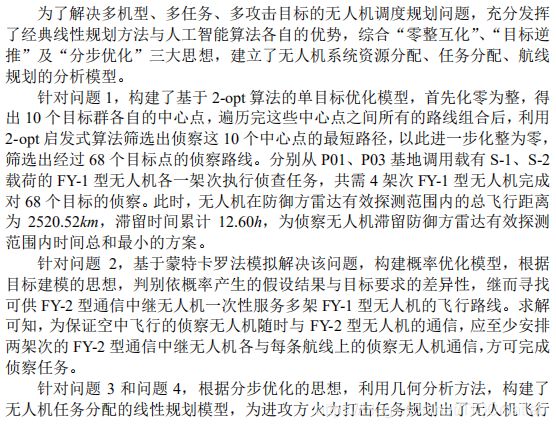
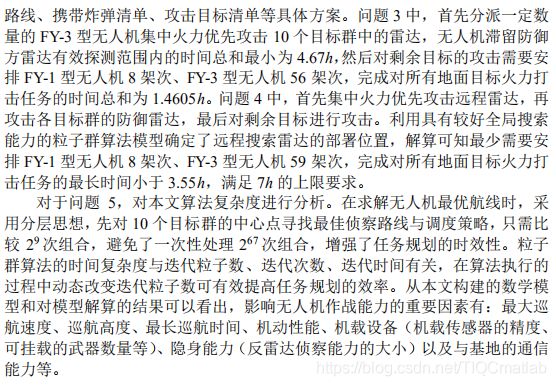
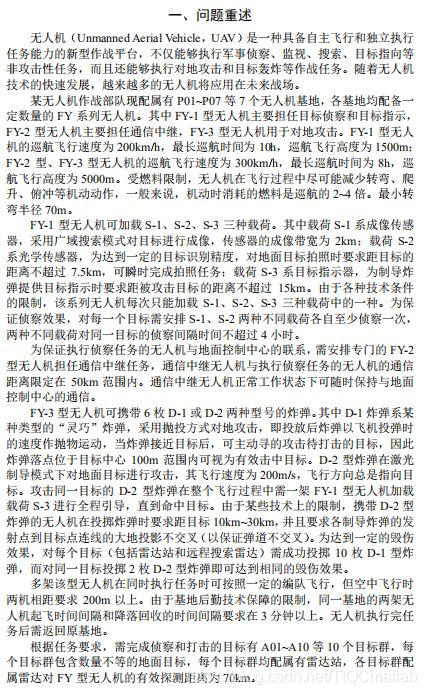
【路径规划】多无人机协同任务规划【含Matlab源码 302期】
一、简介

二、源代码
1、问题 1 中对 10 个中心点的两架次最优调度规划 Matlab 源程序
clc;clear all;close all; position=load('坐标点.txt'); [m,n]=size(position);
j=1;
sumx=0; sumy=0; for i=1:10
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/10;ave(j,2)=sumy/10; j=j+1;
sumx=0; sumy=0; for i=11:19
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/9;ave(j,2)=sumy/9; j=j+1;
sumx=0; sumy=0; for i=20:24
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/5;ave(j,2)=sumy/5; j=j+1;
sumx=0; sumy=0; for i=25:34
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/10;ave(j,2)=sumy/10; j=j+1;
sumx=0; sumy=0; for i=35:41
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/7;ave(j,2)=sumy/7; j=j+1;
sumx=0; sumy=0; for i=42:47
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/6;ave(j,2)=sumy/6; j=j+1;
sumx=0; sumy=0; for i=48:53
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/6;ave(j,2)=sumy/6; j=j+1;
sumx=0; sumy=0; for i=54:58
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/5;ave(j,2)=sumy/5; j=j+1;
sumx=0; sumy=0; for i=59:63
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/5;ave(j,2)=sumy/5; j=j+1;
sumx=0; sumy=0; for i=64:68
sumx=sumx+position(i,1); sumy=sumy+position(i,2);
end ave(j,1)=sumx/5;ave(j,2)=sumy/5; j=j+1;
% ave=position;
Routebest=10000000000; for one=1:2^10/2
A=[];B=[];index=dec2bin(one,10); for two=1:10
if index(two)=='0' A=[A;ave(two,:)];
end
else end
B=[B;ave(two,:)];
[m,n]=size(A);
fit1=[];p1=[];
if m==1
fit1=A;L1=0;
else
[d1]=dj(A);
[p1,L1] = tspsearch2(d1,2);
for i=1:m
fit1(i,1)=A(p1(i),1);
fit1(i,2)=A(p1(i),2);
end
end
[m,n]=size(B);
fit2=[];p2=[];
if m==1
fit2=B;L2=0;
else
[d2]=dj(B);
[p2,L2] = tspsearch2(d2,2);
for i=1:m
fit2(i,1)=B(p2(i),1);
fit2(i,2)=B(p2(i),2);
end
end
if (L1+L2)<Routebest Routebest=L1+L2;
fit1best=[];fit2best=[];p1best=[];p2best=[]; fit1best=fit1;fit2best=fit2;p1best=p1;p2best=p2;
end end
2、问题 1 中对 68 个目标点的两架次最优调度规划 Matlab 源程序
clc;clear all;close all; position=load('坐标点.txt'); po1=position(1:10,:);%A1 po2=position(11:19,:);%A2 po8=position(54:58,:);%A8 po9=position(59:63,:);%A9 po3=position(20:24,:); %A3 po4=position(25:34,:);%A4 po10=position(64:68,:);%A10 po7=position(48:53,:);%A7 po5=position(35:41,:);%A5 po6=position(42:47,:); %A6
A=[po2;po3;po4;po5;po6;po7;po8;po9;po10]; B=po1;
[d1]=dj(A);
[p1,L1] = tspsearch2(d1,2); [m,n]=size(A) ;
for i=1:m
fit1(i,1)=A(p1(i),1);
fit1(i,2)=A(p1(i),2);
end
[d2]=dj(B);
[p2,L2] = tspsearch2(d2,2); [m,n]=size(B) ;
for i=1:m
fit2(i,1)=B(p2(i),1);
fit2(i,2)=B(p2(i),2);
end
三、备注
完整代码或者代写添加QQ 1564658423
往期回顾>>>>>>
【预测模型】基于matlab粒子群的lssvm预测【含Matlab源码 103期】
【lSSVM预测】基于matlab鲸鱼优化算法之lSSVM数据预测【含Matlab源码 104期】
【lstm预测】基于matlab鲸鱼优化算法之改进的lstm预测【含Matlab源码 105期】
【SVM预测】基于matlab蝙蝠算法改进的SVM预测(一)【含Matlab源码 106期】
【SVM预测】基于matlab灰狼算法优化svm支持向量机预测【含Matlab源码 107期】
【预测模型】基于matlab BP神经网络的预测【含Matlab源码 108期】
【lssvm预测模型】基于蝙蝠算法改进的最小二乘支持向量机lssvm预测【Matlab 109期】
【lssvm预测】基于飞蛾扑火算法改进的最小二乘支持向量机lssvm预测【Matlab 110期】
【SVM预测】基于matlab蝙蝠算法之改进的SVM预测(二)【含Matlab源码 141期】
【lssvm预测】基于matlab飞蛾扑火算法之改进的最小二乘支持向量机lssvm预测【含Matlab源码 142期】
【ANN预测模型】基于matlab差分算法改进ANN网络预测【含Matlab源码 151期】
【预测模型】基于matlab RBF神经网络预测模型【含Matlab源码 177期】
【预测模型】基于matlab SVM回归预测算法来预测股票趋势【含Matlab源码 180期】
【预测模型】基于matlab BP神经网络之模型优化预测【含Matlab源码 221期】
【预测模型】基于matlab RLS算法的数据预测【含Matlab源码 222期】
【预测模型】基于matlab碳排放约束下的煤炭消费量优化预测【含Matlab源码 223期】
【路径规划】基于matlab A星和改进A星的路径规划【含Matlab源码 225期】
【TSP】基于matlab 改进的禁忌搜索算法之求解旅行商问题【含Matlab源码 241期】
【TSP】基于matlab 改进的蚁群算法之求解旅行商问题【含Matlab源码 242期】
【路径规划】基于matlab模拟退火算法之求解火灾巡逻最短路径【含Matlab源码 252期】
【三维路径规划】基于matlab 无人机三维空间的航迹规划【含Matlab源码 270期】
【路径规划】基于matlab分布式目标检测和跟踪的多无人机【含Matlab源码 289期】
【路径规划】基于matlab粒子群算法求解无人机最短路径【含Matlab源码 300期】
【无人机】多无人协同任务分配程序平台【含Matlab源码 301期】