self_drive car_学习笔记--第10课:路径规划
前言:这节课围绕无人车的路径规划开讲,包含规划时采用的一些算法思路、一些规划方式,最后以Apollo项目规划部分为例子,介绍一下其中所使用的一些规划算法以及方式。很菜现在,有些理解错误地方,还望大大们不吝赐教。觉得写得还行,麻烦赏个赞哈。好了,不废话,开始主题。
概要:
1 什么是规划
2 传统的规划方法
3无人车的规划
4Apollo如何求解规划问题
1 什么是规划
1)规划planning目前是无人车最困难也最有挑战的部分
1.1 规划的本质
1)求解:argminf(x)
获取最小值就是规划;f 可以理解为成本,x可理解为轨迹,追求最小成本就是规划的本质。
2)规划问题也可理解为搜索问题,
----【比如】Google:关键词,返回最优结果
----无人车:当前环境和当前状态,返回当前路径上的最优选择
3)什么是好的规划?
----“好”,取决于目标函数,f(x)的最优解
4)运动规划 motion planning 的三个领域
4-1)机器人领域robot fileds:
----规划领域理解:生成轨迹,实现目标
----经典的实现算法:RRT、A*、D*、D* Lite
4-2)控制领域control theory:
----规划领域理解:动态系统理论,实现目标状态(从而完成planning)
----经典实现方法:MPC、LQR
4-3)AI
----规划领域理解:生成状态和Action的一个映射
----实现方法:Reinforcement learing(强化学习),Imitation learing(模仿学习)
参考材料:http://planning.cs.uiuc.edu/par1.pdf
1.2 如何解决一个规划问题motion planning
1)突破口:规划问题简化成一个简单问题:path finding problem
----简化后的问题特征:不考虑速度,不考虑怎么走过去;周围环境固定
2)简化后,问题转变为:路径选择问题
----A simple shortest path example: http://qiao.github.io/PathFinding.js/visual/【在线最短路径展示,使用的原理有DFS、BFS、Dijkstra】
----重点理解最好的path是怎么样的?
--------路径最短的path
【DFS、BFS方法查找最短路径有缺陷的,假设地图无限大,就有可能无法搜索到目标点,也就是说有可能无法找到路径】
----展示的看到的search属于Non-informative search,效果较低
----A* search:基于Dijkstra的改进算法:
https://www.redblobgames.com/pathfinding/a-star/introduction.html
----该算法,大概知道了终点位置
----然后,设置Heuristic func,其可以估计下一移动点为更可能性的点【到达目标点可能性】
----以上就是A*算法的思路
【不离散化,对连续空间的求解比较困难,这是因为连续空间求解会涉及解析式,该式求解比较困难;所以,离散化网格处理是机器人通用的路径求解方式之一。高效的离散化,高效的网格化,是研究的重点】【A算法,面试时候,公司都会要求至少写出一个A思路】
3)无人车的规划和A* Search相差多远?
----无人车属于部分感知【上面展示的A*算法,是知道了全局、周边环境以及终点位置,而无人车只是局部信息,也不知道终点具体在哪】
----无人车周边的障碍物属于动态的,而且该障碍物不确定性极高【这里就需要通过前面课程学习的预测等来降低不确定性】
----无人车的环境比较复杂,例如有交通规则
4)A* 本身是一个Global Algorithm【目前的导航地图的基本思想就是A*】
----Global rounting【将rounting路由信息传给无人车,从而进行一个细节的规划】
5)Partial observed situation【部分感知情况解决方式】
----贪心算法
---------incremental search增量式搜索:把目前获取的状态信息,求解出最优解
-----D* star算法【对A* 进行改进】,对部分环境信息的一种search,典型运用是,Apollo登月小车;后面,D* star 算法发展成更轻量级算法D* lite。
----D* lite算法,利用当前信息对全局信息进行一个修正
6)利用5)中的算法,可以求得全局最优吗?有可能,但是难度不小;进一步考虑,有必要全局最优吗?没有必要。
Optimal and Efficient Path Planning for Partially-Known Environments【部分最优从而接近全局最优的理论,对应的论文链接:】
https://www2.cs.sfu.ca/~vaughan/teaching/415/papers/dstar_icra94.pdf
7)上面介绍了搜索方式:informative &non-informative search【有提供信息与无提供信息】
两种感知方式:Global & partial observed【全局与局部方式】
8)根据上面 1)-7)的讨论,解决无人车搜索问题,可以尝试有如下方法:
----【首先定义一个目标函数】目标函数并且结合了平滑性和目标cost
----使用通用的Search方法来最小化cost,从而找到一个最优解
----通过partial observed information 来做局部planning
9)对于8),对于无人车规划而言,还缺少一些东西:
----处理动态障碍物,动态环境【如果将动态环境也作为静态处理,会导致很大问题】
----处理交通规则【涉及公共安全问题】
----实时计算【无人车要求的planing是在100ms-150ms之间;人的反应时间一般在300ms-500ms,酒驾时会达到1000ms;实时计算,也就是在有限时间内找到最优解;这也是无人车开发,一般使用C++,而不是使用python,由于C++算法有更多的实时性优化】
10)无人车motion planning的定义涵盖:
----safely安全性
----smoothly平滑性【保证乘客舒适性】
----Achieve to destination到达目的地
----X、Y,Time:3D trajectory optimization problem【规划问题,也可视为三维轨迹优化问题】
----无人车硬件信息:定位设备、感知设备
----无人车软件信息:动态信息【处理程序】、静态信息【HP MAP(其是实时性的保证)】【如果静态信息不是使用HP MAP提供的,而是通过感知获取的,那么实时性大大降低】
----如何设计出一个合理的轨迹?:路径path【运动路线设计】、速度speed【到达目的地速度设计】

路径规划【不局限无人车】参考书籍推荐:
Steve Lavelle,Motion Planning Algorithms【全面介绍Motion Planning】
【http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.225.1874&rep=rep1&type=pdf】
Principles of Robot Motion:Theory, Algorithms, and Implementations【机器人里面综述类书籍】
经典文献:A Review of Motion Planning Techniques for Automated Vehicles【综述类】
【https://www.researchgate.net/publication/284766879_A_Review_of_Motion_Planning_Techniques_for_Automated_Vehicles】
2 传统的规划方法
2.1机器人学基础
基本planning方法:
1)经典基于环境建模的方法
----RRT
----Lattice【网格化】
2)现代无人车planning方法
----Darpa【无人车开发的方法】
----Lattice in Frenet Frame【这里的Lattice和上面的是有区别的】
----Spiral polynomial【解决无人车平滑性所采用的一种思路】
【这里涉及的方法都在下面文章中有介绍,如文献中截图如下】
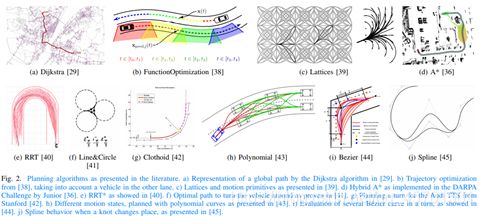
来自:A Review of Motion Planning Techniques for Automated Vehicles
3)质点模型
----将物体看成一个质点
----点与点不碰撞
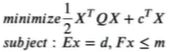
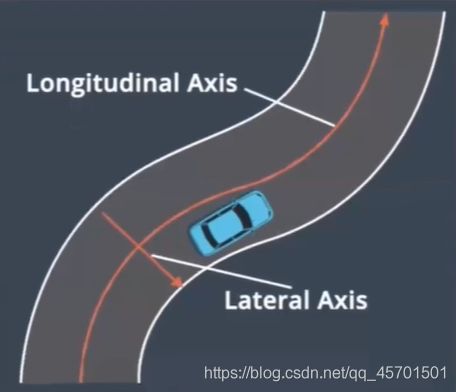
4)刚体问题【无人车可视为一个刚体】
----BycicleModel自行车模型【其是无人车建模的一种基本方式】
—XY Heading【这是有方向的X、Y,可理解为矢量】
----Collision【碰撞条件比点与点的更严格;而且,碰撞检测更复杂】
5)Planning限制条件
----避免碰撞
----边界阈值【这么理解,理论人和车距离3-8米,但是由于车的传感器并没有人的感觉器官反应能力那么优秀,由于传感器数据传输有延迟这些,为了避免安全事故,车与人的距离应该更远,这个安全距离可视为阈值】
6)连续空间问题解决方式:
–离散化
–网格化
2.2 经典算法
传统的机器人基础:
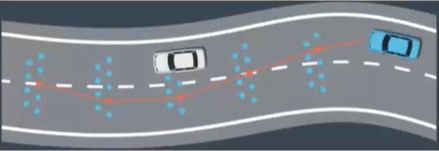
1)PRM(Probabilistic RoadMap Planning)【非常实用的一个方法】
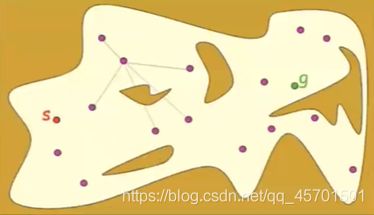
【开始点s,目标点g,由于连续空间中计算能力比较弱,而且也不知道全局环境,所以该方法采用撒点方式,如图中紫色点,如果撒点和障碍物重合了,就把该点去掉;洒的点多了,自然可运行空间就出来了;但是撒的点不会过多,这是因为只是为了达到目标点g,而不是走每一个角落】
----连续空间离散化:
---------随机撒点【全空间撒点】
---------【撒在】Obstacle上的点就删除
----连接可行点,形成可行空间
----A*【获取运动轨迹】
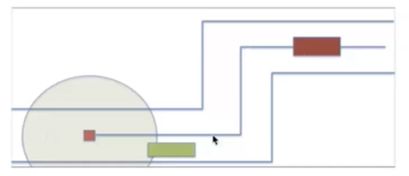
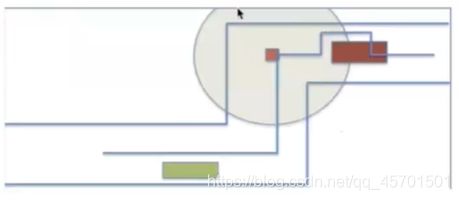
2)RRT(incremental version of PRM【上面的PRM方法的改进版本】)

【增量式解析:图中点T想在空白区域行走,先撒两个点,】
2-1)使用增量搜索方式进行
2-2)找附近可行点的最优点:
----F(x)最小,也就是成本cost最小
----走过程中也不能有阻碍【这个也放在cost里面描述】【如路面不平】,尽量使得这个cost小
2-3)运动过程中,还有可能碰到障碍物
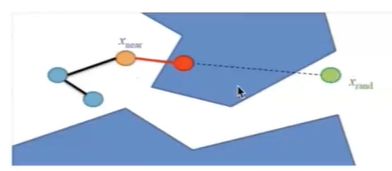
2-4)撒点搜索距离不能太远【上图就是撒点太远,导致碰到障碍物】
----【撒点】需要一步一步移动
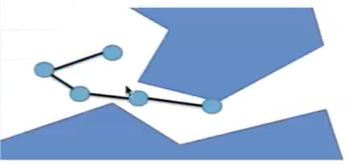
【这里撒点移动路线属于折线,对于质点移动还行;但是对于刚体移动来说,属于曲率无穷大,是不行的;此外,这种撒点方式还不能解决动态障碍物问题】
3)Lattice方法
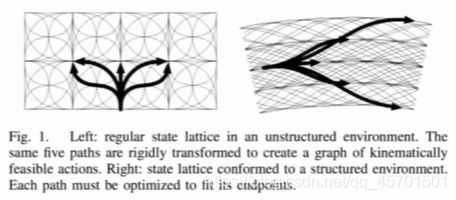
3-1)该方法改进了RRT的折线问题
3-2)目的是,给出path的平滑曲线
3-3)采用的思路是,网格化【将搜索空间替换成一个一个小格子;每个采样格都是用曲线连接】【例如上左图中每个网格内,连接曲线都是平滑的】
3-4)该方法属于指数级别的搜索算法(NP-Hard)【这是该算法的一个缺点】
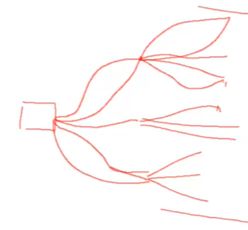
【指数级别可以理解为,一开始无人车所处的点有5根曲线,当达预测到下一个点时候,每个预测点又有多根曲线,这就是指数级别的增长了;为了改进这种搜索缺点,学者们改进了曲线搜索方式,比如,第二级中的曲线到达的点相隔很近,那么,没有必要再取这么多点的,把相近的点合并一个处理,加上撒点范围的约束(道路两侧约束),就可以避免了指数级的搜索空间增长】【最后,形成一种点线连接的搜索方式】

4)DP(动态规划)
【结合上述 3-4)后一草图可知,后面采用的点线搜索方式降维,这是由于使用了动态规划】
4-1)该算法减少了搜索空间:通过复用已有结果【搜索过的路径空间保存下来】
4-2)Lattice DP曲线的平滑度情况:曲率连续、曲率导数不一定连续【联系到无人车例子,曲率不连续,有可能出现,上一瞬间打方向盘90°,下一瞬间打180°,明显不符合驾驶习惯的】
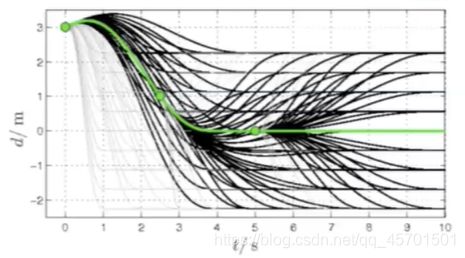
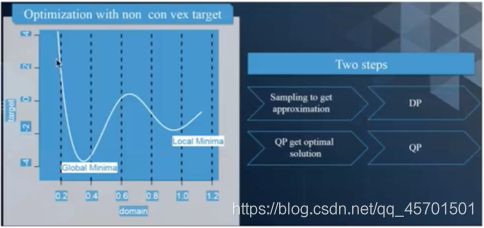
5)QP(二次规划)【解决 4-2)中的曲率导数不连续情况】
5-1)凸优化问题最优化求解
5-2)公式表达:
5-3)二次规划性质:在凸优化中的凸空间问题,用QP,有最优解
5-4)QP如何找到平滑曲线?
----min|f’|^2
----min|f’’|^2
----min|f’’’|^2
【上面所示意思对应的导数都是最优的,此时可以保证平滑曲线存在;个人理解为高维导数的连续来保证平滑】
5-4)其他的平滑曲线方法还有贝塞尔曲线、样条插值方法
【贝塞尔曲线多阶多项式都平滑,从而保证曲线平滑】
6)刚体模型
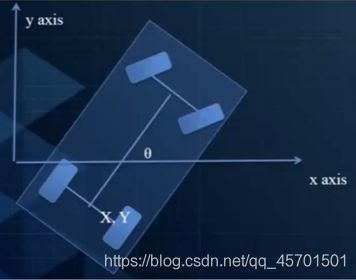
【建模时候,后轮轴线中点设置为车的原点(0,0);前轮轴中心设置为前轮中心的拐点】【前后轮和转向的关系:】
6-1)前轮转向和Heading的关系:
----车轮是沿着切线方向行驶
----前后轮是同一个旋转中心
----左右轮的结构相同【排除差速情况】【假设前后轮绕转同一个中心旋转,那么会是一个环形状,由于前后轮旋转半径不一致导致的】
6-2)Bicycle Model
【由于6-1)的已知关系,那么将左右轮简化,以中轴轴线为中心建立车轮关系,得到上图的单车模型;w表示的是前轮转角,】
----曲率公式:1/R=kappa=(tan(w)) /L
3 无人车的规划
无人车planning定义:
----A点到B点,构建一个车辆运动轨迹,结合 HD MAP,Localization和Prediction【高精地图、定位、预测】
----输入【结合模块的信息】
----输出:可行性轨迹,有一系列点组成【点使用X,Y,time来表示】【注意要轨迹要避免碰撞,体感舒适】
----两个层面:导航层面【获取开始点到终点的基本路线;可视为一个粗略的planning】、运动轨迹层面【给出在路线前进时,运动的细节轨迹;可视为一个细节的或者多层面的planning】
3.1Routing
1)Routing定义:导航一条从A到B的全局路径
2)输入:地图(路网信息、交通状态【如道路拥堵情况】)、当前位置、目的地(乘客决定)
3)输出:可行驶道路的连接线
4)搜索:【将高精地图】地图数据转化成图网络
----节点表示道路【node的划分可以自定义的,并不是一条道就是node,比如靠左靠右划分两个node也是可以的】
----边表示道路连接
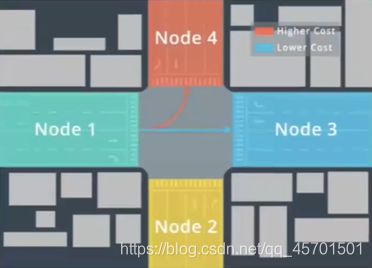
【里面道路权重是不一样的,左右转不一样,拥堵情况也会影响权重】【左转的cost比较高原因是,其碰撞风险更高,左转还需要等红绿灯】
5)经典算法A*
----其是最经典的路径查找算法
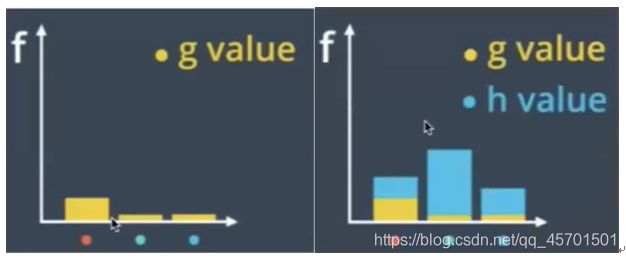
----F(n)=G(n)+H(n) : F(n)表示道路的routing的总cost;G(n)表示起始点到候选点的cost;H(n)表示候选点通过启发函数得到的目标点cost

【启发函数怎么得到,就是A算法的重点】【每个格子,中间值就是F值,上两个值就是G和H的值,亮橙色为起始点,启发式搜索一圈,也就是围绕这个点搜索一圈每格子的总cost,发现是其下面的cost40为最小,则移动到下面的格子,循环往复达到绿色格子上】
【关于A算法学习,https://www.redblobgames.com/pathfinding/a-star/introduction.html】
6)真实地图中的应用
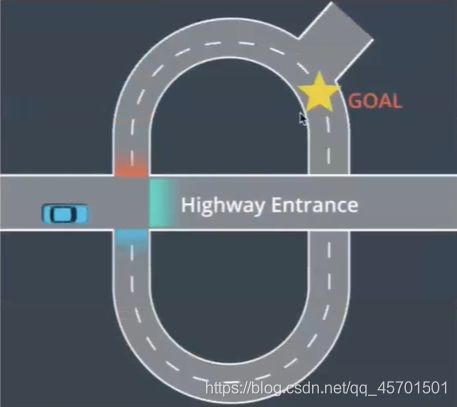
6-1)左转cost最大【结合F=G+H函数思考下面图】【结合上图来看,红色表示左转,蓝绿色表示直行,淡蓝色表示右转】
6-2)通过比对发现,右转的总cost最小,那么选择右转。【这也是导航地图路线搜索的基本思路】
3.2 Planning

1)planning可理解为高精度、低级别的一个search,又可称为trajectory planning【轨迹生成】【结合上图,轨迹由点组成,该点带有相对当前的时间以及速度;提供速度的目的是,为了方便后面做跟踪】
2)轨迹点:X、Y、time、Velocity【(好像是指)道路坐标系中的坐标XY、相对当前的时间、速度】
【这里还需要一个速度的标签,这是因为实际情况,速度是存在抖动情况的,也就是速度平滑性不能保证的,所以不能简单利用轨迹点和时间来求取速度;所以,这里使用了速度信息,然后让control来跟踪。同时,这里要明白,并不是一定是给定速度,而是,给出速度,可以更好让后续模块跟踪轨迹点】
3)规划的约束条件
----Collision 碰撞:躲避任何障碍物
----Comfortable 舒适性:路径点必须相对平滑、速度也要平滑
----运动学约束:高速转弯【应该避免,因为有侧翻可能】、掉头曲率角度【符合常规】
----illegal 合法:符合交通法规、符合人类约定俗成规则
4)cost function成本函数
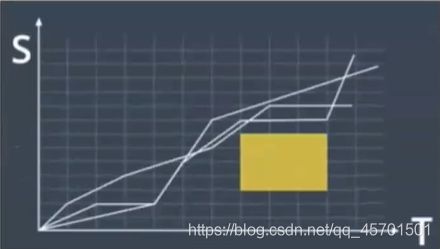
4-1)真实情况下有多条可行轨迹

4-2)cost由许多条件组成
----道路偏移中心线距离【越偏离,cost越大】
----碰撞或者靠得太近【对应cost越大】
----速度太快,超速【对应cost越大】
----curvature曲率太大,打方向盘太急【对应cost越大】
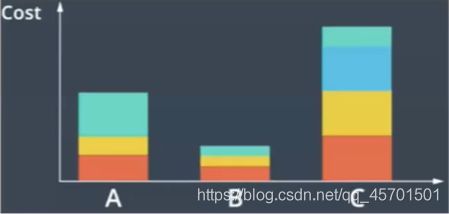
【对上述得三种运动路线进行cost比对,可以发现中间得cost最小,那么可以选择中间方式的路线】
4-3)不同场景下我们可能有多个不同的cost function
–高速场景【速度慢是一个大cost】
–停车场【速度慢是一个小cost】
–不同车辆【卡车和私家车的cost不一样】
5)Frenet坐标系(车道坐标系)
5-1)一般使用笛卡尔坐标系(世界坐标系)的话,
----xy坐标无法知道无人车开了多远
----不知道有没有偏离中心线
----也不知道道路在哪
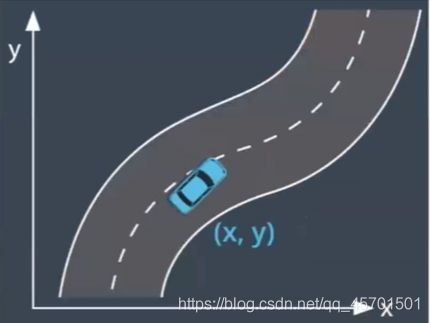
5-2)更好的坐标系:Frenet【车道坐标系】
----注意和Track坐标系的区别:
--------L方向不同
--------Track是基于Road级别【高精地图介绍的track坐标系,就是道路坐标系】
--------Frenet是基于Lane级别【这里是路线坐标系】
----S表示走了多远
----L表示距离车道有多偏
6)Path VS Speed 解耦【轨迹生成和速度生成需要解耦;只有解耦,才能使得每个部分的形成凸问题,只有凸问题才能使用QP来处理;当混合一起,就不是凸问题,求解空间会非常丰富】
----Path planning
--------生成可行轨迹路径
--------cost:path平滑性、安全性、道路中心偏移距离
----选择出成本最低的一个path planning
----speed planning
--------每个path上选择一系列速度(每个点都有速度),生成速度轨迹
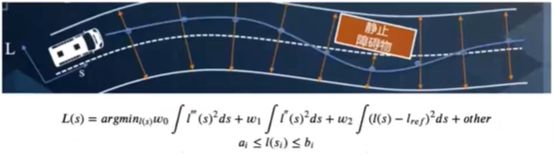
7)Path Planning
----首先生成道路网格(GridMap网格地图)
----每个网格单元中随机采样(撒点)
----每个网格选一个点
----组成多条候选path
----基本样式如图下
Cost Function对这些轨迹进行评估,需要考虑:
----找到一个成本最低的一个
----中心线距离 la
----障碍物距离da1
----速度变化率acca2
----曲率kappaa3
--------为什么是kappa?个人感觉是,舒适性原因。如果曲率不平滑,必然会有打方向盘很急,乘客难受,也有翻车可能性。
F(x)=l* a0+d* a1+acc* a2+kappa* a3+a4【上述几项cost相加,获取cost function函数】
【cost线性加权,如果在参数可调情况下,就可以达到局部最优】【这里的权重需要人为来调节】
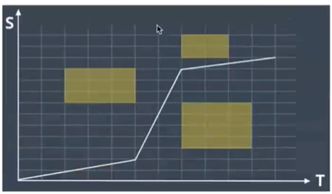
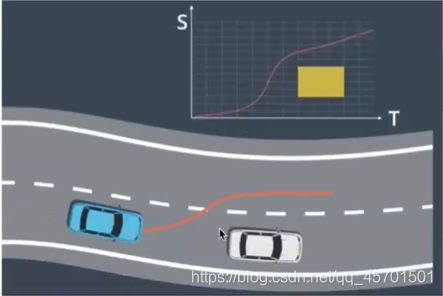
8)speed planning
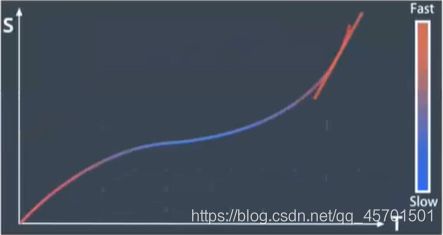
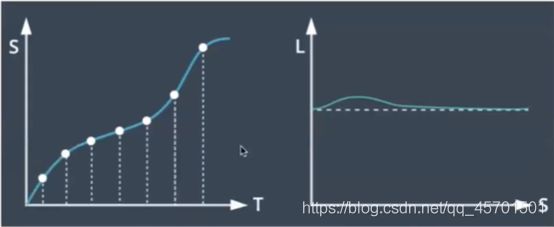
【ST图中的S并不是指道路S,而是指给定path的S,如上面图中红色线path的S;颜色表示的是斜率,也就是速度;】【ST图将三维XY、time空间,降维到ST的二维空间,其中path锁定了XY,这里理解图中的S,这样可以使得无人车规划求解过程中,有了数学工具,如QP,进行求解】
----S表示Path上纵向距离
----T表示运动时间
9)如何规划ST轨迹
9-0)连续空间离散化(grid map网格地图)
9-1)每个单元格速度保持不变【每个单元格的速度线,在图中不能是曲线连接,只能使用折线连接】
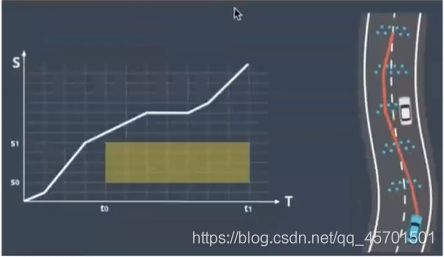
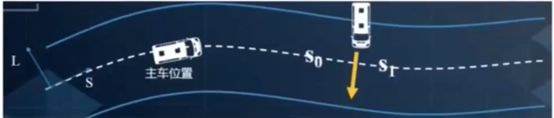
9-2)把障碍物投影进来【投影到ST图】
----挡住给定的path轨迹的部分画进ST图中
----因此必须要有良好的预测轨迹
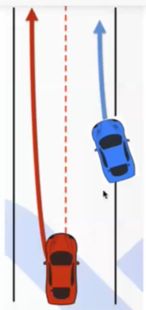
----(下图,t0,t1时刻障碍物会在我们的path轨迹中挡柱s0,s1部分)
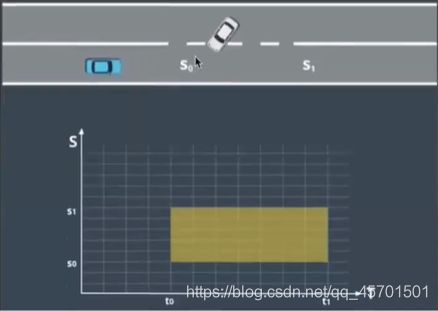
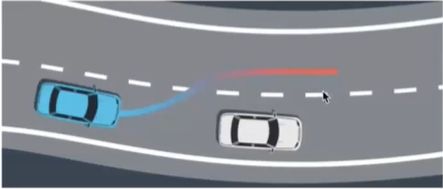
【无人车直走,白车前方掉头,那么,白车视为障碍物,并在ST图中表示出来】【t0、t1信息是由预测模块提供的】
9-3)速度曲线不能碰撞这个区域【个人觉得这里速度曲线说法有点不合适】
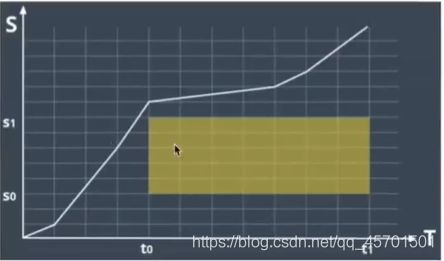
【上图就是为了避免速度曲线碰到障碍区域,设置了白色的轨迹路线】【个人感觉这里的速度曲线相碰,倒不如说ST曲线相碰比较合适,有点迷糊这里;有大佬知道的话,麻烦告知一下哈】【而且,感觉无人车加速通过的】
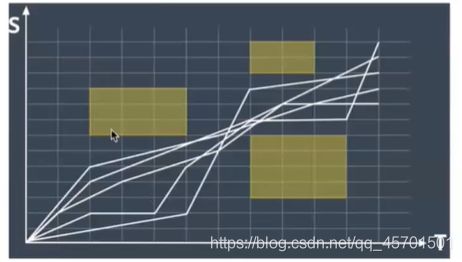
【上图是,多障碍物时候的路线规划情况】
9-4)凸优化求解得到最优的速度曲线
----search搜索
----限制条件:速度限制、距离限制(安全距离)、车辆动力学限制(车的加速度、刹车性能)
10)如何优化?【这个折线不平滑,需要优化】
10-0)对不平滑的速度线进行优化
----使用QP(二次规划)进行优化
【通过QP约束速度,约束加速度,约束加速度导数,使得平滑非线性曲线和平滑的加速度曲线,达到一个拟合程度;拟合程度多少,由QP约束条件来确定】
10-1)这个方法很大程度依赖于连续空间离散化
10-2)网格、单元格方法
----但是不平滑【解决方式:】
--------Quadratic Programming 二次规划
--------将平滑的非线性曲线与这些线段进行拟合
--------有现成工具qpOASES
【将折线拟合成曲线思路,最后使得path结果可用,例子看轨迹规划例子】
11)轨迹规划
11-1)实例,遇到一辆很慢的车,如何超车

11-2)生成很多轨迹线(撒点采样)

11-3)cost function对其进行评估,选择cost最小的一条【比如安全距离太小导致cost过大,直接去掉】
11-4)生成一个ST图表述速度规划
11-5)生成多条速度曲线【撒点】
11-6)使用优化工具对多条速度采样进行最优化求解(cost func成本函数,constraints约束)【优化,就是保证每个点的加速度最小,加速度平方最小,加速度导数平方也最小】
----让整个路线和速度曲线变得平滑
11-7)最后将每个轨迹点(跟自定义的轨迹点resolution)的path、speed合并得到最终结果
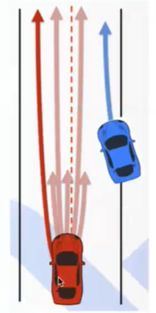
【红色表示速度较大,青蓝色表示速度低】
【上面规划思路是,path和speed是分开规划】
3.3Lattice Planner【网格规划】
【这里介绍的方法的规划思路是,path和speed合并一起规划】
1)SL轨迹和ST轨迹
2)Lattice将两个图合并处理,同时进行path和speed的采样
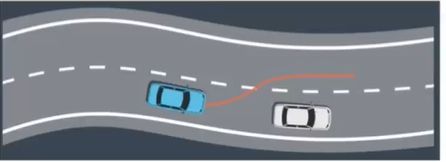
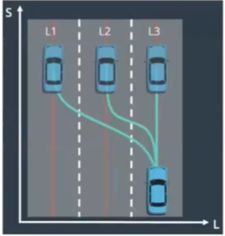
3)实例:一个切车场景
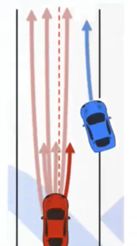
3-1)先对整个候选轨迹进行采样
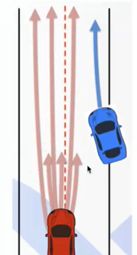
【红色线表示红车的预测轨迹范围,短的表示速度慢,轨迹分布情况,长的表示速度快,轨迹分布情况】
3-2)设计一个合理的cost
3-3)选择一个cost最小的轨迹
3-4)条件检查和碰撞检查
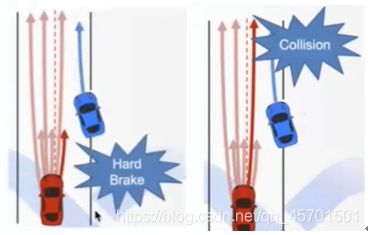
【左侧路线有急刹情况;右侧有碰撞情况】
3-5)检查失败,则返回继续找cost次优选项
3-6)成功输出结果
----Lattice因为其采样计算量大,为了优化其采样效果,需要先进行场景化以简化计算量【这是Lattice的一个弊端,计算量很大,如果预测5s到8秒时,计算量指数爆炸增长】
【lattice这种规划方式在2006年时候使用后,因为计算量大而逐渐退出无人车领域;但是在物流小车比较适用,由于物流小车的速度没有那么快,采样量比较小,这种比较适合lattice】
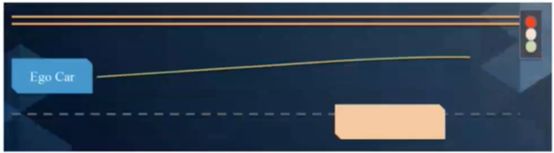
4)Cruising,Following and Stopping:对S方向进行优化【特定场景使用lattice】
【下面三种场景,减低了lattice的采样点,从而减低计算量】
4-1)Cruising:定速行驶
----v=vc
----a=0
----这种状态,不需要采样
4-2)Following:跟车行驶

----需要对s和t同时采样
----规定时间t跟在某个车的后面【减低可选点范围】
----保证安全距离
----速度v=v1
----加速度a=a1
4-3)Stopping:停止

----对车辆在哪里停下来进行采样
----s和t同时采样
----加速度a=0
----速度v=0
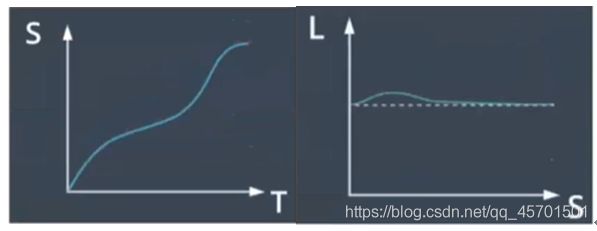
5)Lattice对L方向进行优化
----需要保证车辆以一个稳定的状态进行终点状态,比如与本车道线平齐
----H’=0 H’’=0【横向的 速度、加速度都为0】【这是lattice对L方向优化】
----S’=0 S’’=0【纵向的 速度、加速度都为0】
6)合并ST和SL坐标:
----转化到Cartesian坐标系
----生成X Y time 三维轨迹
--------两个坐标系都有S;找同一个S对应的L和T
【ST曲线也是先简化为凸函数】
【凸问题感性认识:以前面有车掉头为例,无人车有两种情况,一种是加速赶在掉头车前通过,另外一种情况,等待掉头完毕再通过,这时候求解path规划不是凸问题;假设,我们告诉无人车只能超速通过,这时候,path规划求解就是一个凸问题求解】
3.4上述两种无人车规划方式小结
1)path和speed分开规划【两者交替进行】
2)path和speed合并规划【lattice方式】
3)小答疑:
【二次规划,主要是对非平滑曲线进行平滑处理;二次规划QP可以处理任何凸优化问题】
【超车时,如果最优的cost还是很大,系统会不进行超车操作,这是决策层决定方案的执行与否的;也就是说,方案的cost出来了,最后是否实施,是由决策层决定的;并不是最优了就一定会执行】
4 APOLLO如何求解规划问题
【阿波罗规划,采用了上述两种方式,但主要是以交替方式为主】
1)Constrains约束
1-1)soft contraints&hard constraints【软、硬约束】
1-2)例子:
1-3)constraints:
----交通规则:Hard constraints【硬约束】
----用QP或者Hard code 方式精细处理【这些约束,都会放到二次规划QP求解过程中】
1-4)Decision
----决策:soft constraints
----用DP的方式来处理一些人为设置的软约束【例如不往障碍物右侧撒点,就不会往右边走了】
1-5)最优轨迹
----通过二次规划QP生成最优轨迹
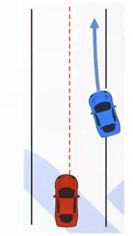
2)如何换道
2-1)无人车想要换道怎么办
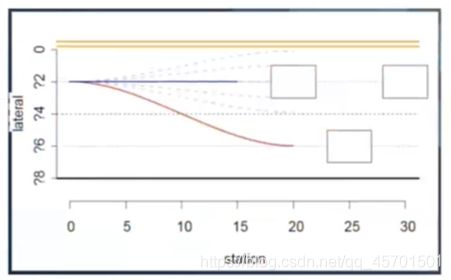
2-2)换道考虑很多安全性问题
----给出两种轨迹结果,让后续模块判断【一种换道轨迹,一种不换道轨迹】
2-3)Reference Line Decider
----判断换道时,是否安全
----拿到信息比planning丰富【例如,观测后方是否有来车,目的保证安全】
----做很多准备工作【例如决定换道时,提供打方灯的指令】
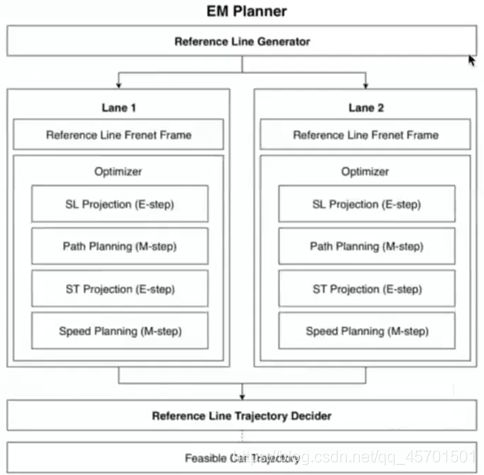
4.1 EM Planner(Apollo)
1)什么叫EM【EM,期待最大化】
【EM思路,单个维度求解最优解,然后叠加所有维度的最优解,得到的最优解(和一开始使用多维度计算最优解得到结果差不多)】
2)上图基本流程:
【下面就是Apollo的EM操作】
2-1)首先生成一条Optimal Path(理想path)
2-2)再生成一条当前(理想)path情况下的optimal speed
2-3)再将目前的speed返回给path进行一次tuning(调试)
2-4)将tuning的path返回给speed做优化
2-5)最后迭代到最优解
2-6)贪心算法:Local Optimum
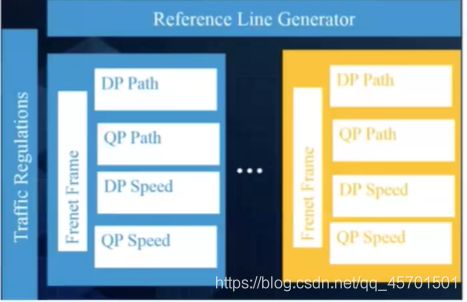
3)Apollo规划基本框架图
【这就是Apollo规划思路】
4)上述3)框架总结:
4-1)三个关键步骤:
----目标函数:线性加权的cost
----限制条件:交通规则、碰撞条件(无穷大)、动态特性(车辆能力)
----优化求解:如何计算最优解(DP+QP)
--------DP:不要求问题是凸的
--------QP:是一种凸优化
4.2 DP、QP求解
1)path QP
1-1)问题抽象:根据当前驾驶信息和道路状况建立平滑的SL坐标轨迹
1-2)模型建立:合理优化目标函数和约束条件
1-3)优化方法:二次优化求解带约束的二次规划问题
【上面的path是已经撒完点后拟合的结果;这个公式就是方便求解平滑曲线】
2)speed DP
2-1)问题抽象:使用ST图
2-2)模型建立:cost函数(障碍物、曲率、无人车状态)
2-3)优化方法DP最优求解
2-4)s’=v 速度
2-5)s’’=acc 加速度
2-6)s’’’=jerk 踩油门或刹车的速度
3)计算提速思路【Apollo给出的一些规划提速方案】
3-1)SL坐标系离散化处理
----粗分辨率使用时机、细分辨率使用时机【障碍物复杂,分辨率低一些;不复杂时分辨率则大一些】
3-2)GPU并行计算
----同时计算多条reference lane【参考路线】的结果
3-3)QP Hotstart
----QP的性质【QP的原理是泰勒展开】
----两帧之间差距不大【上一帧结果启发下一帧开始也是可以的】【个人没有理解】
3-4)精通C++【利用编码思路来提升处理速度】
5 小结
1)规划的定义
----规划本质就是一个搜索过程。【理解是一个搜索过程,那么就可以利用很多思路,通过现有的数学方式、图模型方式来求解】
2)机器人学的基本规划思路
PRM(撒点)->RRT(增量式撒点)->lattice(平滑折线)->动态规划DP(降维)->二次规划QP(平滑曲线)
3)无人车规划特点
----先用path求解,再用speed规划【path和speed交替求解】
----path和speed结合求解
4)Apollo中EM Planner
----path、speed规划中,添加了EM(期待最大化)思想,求解当前维度下的最优,循环迭代找到更优的结果,这样子防止出现局部最优的带来的限制。【个人理解是,目的获取全局最优结果】
答疑环节
1)预测模块在规划的作用体现就是,使得障碍物可以被绘制到ST图中
2)轨迹规划流程:网格化、撒点、利用搜索找到折线轨迹,再利用QP进行平滑处理
3)撒点有效性取决于撒点密度,撒点密度取决于计算效率。
4)撒点不一定每个网格都要有点,有些空格也可以是没有点,其为了减低采样频率。这些方式,应该根据实际项目来思考的,没有孰优孰劣一概而定的。
阅读资料:
A Review of Motion Planning Techniques for Automated Vehicles
Baidu Apollo EM Motion Planner【https://arxiv.org/pdf/1807.08048.pdf】
A*: https://www.redblobgames.com/pathfinding/a-star/introduction.html【这个式面试必写的】
Coding:
PythonRobotics: https://github.com/AtsushiSakai/PythonRobotics【代码,关于规划示例,关键式学习算法思路,因为其使用的是python写的,c++写的话,会有更好的优化】
思考:
Everything is trade-off?【trade-off平衡。开发过程,做的是找一个平衡。我们并不是找某个最优点或者速度最快的解,而是在效率和结果上取一个平衡的解】
No model is perfect,but useful【无人车很难找到一个最优的解,每个模型都有其优势和劣势;充分利用优势和劣势,逐步找到当前环境下的最优解】
个人小结:
这节课介绍了路径规划。首先,介绍规划的本质是搜索。然后,介绍机器人学基本规划思路,循进介绍了PRM、RRT、lattice、DP、QP特性。接着介绍无人车路径规划采用的两种方式,path、speed交替进行方式,以及path、speed合并进行方式。最后,介绍了Apollo项目的规划情况,其采用了上述两种方式,但主要是以交替方式为主;此外,也介绍了其规划融合了EM的思想。不过,这些理论东西,还是觉得很迷。菜是原罪!
#####################
感恩授课老师的付出
图片版权归原作者所有
不积硅步,无以至千里
好记性不如烂笔头
感觉有点收获的话,麻烦大大们点赞收藏哈