【玩具】ANU Matlab Game Simulation
这段代码模拟了警察抓小偷,密室之中,小偷想偷到珠宝,自己有个探测器,警察也有探测器,不过是探测小偷用的,警察之间可以相互传递消息。
下面是程序的输入文件parameter.txt
# Size of side of square room (even integer), in m 2 # Radius of entry circle, in m 0.6 # Position of treasure (x and y coords), in m 0.5 0.5 # Range of anti-cloaking device, in cm 150 # Position of the escape route (x and y coords), in m 0.5 -0.5 # Time limit for simulation, integer 1000 # Time limit for each person's entry (max time steps), integer 100 # Thief sensor range (radius), in cms 5 # Number of cops, k, an integer 3 # Cop1 sensor range (radius), in cms 50 # Cop2 sensor range (radius), in cms 50 # Cop3 sensor range (radius), in cms 50
程序文件crgame.m
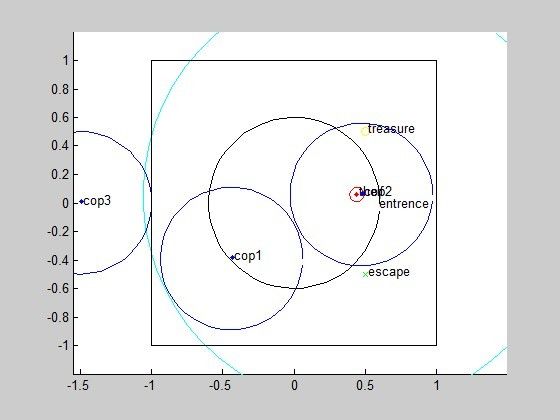
% crgame.m function crgame clc clear close all %% fidin=fopen('parameter.txt'); %read the data from the txt file fgetl(fidin); f1=fscanf(fidin,'%f');%Size of side of square room fgetl(fidin); f2=fscanf(fidin,'%f');%Radius of entry circle fgetl(fidin); f3=fscanf(fidin,'%f');%Position of treasure x,y fgetl(fidin); f4=fscanf(fidin,'%f');%Range of anti-cloaking device fgetl(fidin); fesp=fscanf(fidin,'%f');%Position of the escape route fgetl(fidin); f5=fscanf(fidin,'%f');%Time limit for simulation fgetl(fidin); f6=fscanf(fidin,'%f');%Time limit for each person's entry fgetl(fidin); f7=fscanf(fidin,'%f');%Thief sensor range fgetl(fidin); f8=fscanf(fidin,'%f');%number of police. fgetl(fidin); f9=fscanf(fidin,'%f');%cop1 sensor range. fgetl(fidin); f10=fscanf(fidin,'%f');%cop2 sensor range. fgetl(fidin); f11=fscanf(fidin,'%f');%cop3 sensor range. fgetl(fidin); fclose(fidin); % u=importdata('parameter.txt') u=[f1;f2;f3;f4;f5;f6;f7;f8;f9;f10;f11;fesp]; %% %parameters step_max=u(6,:); %define the data in the txt file L=u(1,:); %into the description used in enter_r=u(2,:); %the main program enter_xy=[0;0]; %The data includes the size of treasure=[u(3,:);u(4,:)]; %the room, the radius of the thief_treasure_sensor_radius=u(5,:)*0.01; %entry circle, the sensor radius step_size_thief=0.01; %of thief and police, maximum thief_sensor_radius=u(8,:)*0.01; %number of step etc. step_size_police=[0.01,0.01,0.01]; police_sensor_radius=[u(10,:)*0.01,u(11,:)*0.01,u(12,:)*0.01]; delta_step=[rand*100+10,rand*200+10,rand*300+10]; escape_slot = [u(13,:);u(14,:)]; %% %main %status for cop find thief, thief find cop, thief find treasture s_ct = [0;0;0] % the cop find thief is off. s_tc = 0 % the thief find cop is off. s_tt = 0 % the thief find treasure is off. s_ttd = 0 % the thief got the treasure is off. s_cc = 0 % the cop find another cop is off. c_flag = 0 % when find the thief the cop's drection t_flag = 0 % thied find the treasure. td_flag = 0 % thief got the treasure. % some important time point when_got_treasure = step_max; current_thife_pos = [0;0]; % curent_thife_position thief_position{1}=enter_game(enter_r); %in this section, we designed the main program for h_1=1:length(step_size_police) %that manipulate the overall movement and actions for h_2=1:delta_step(h_1)-1 %of the thief, cops and the treasure. police_position{h_1}{h_2}=[-1.5;0]; end %here we made a design that let the police to be the enter_pos = enter_game(enter_r); police_position{h_1}{h_2+1}=enter_pos; %backup that stands outside of the room. end %Instead of appearing suddenly, the cops were waiting caught=0; %outside of the room and come inside when required. for i=2:step_max+1 thief_position{i}=rnd_move(thief_position{i-1},L,step_size_thief); current_thife_pos = thief_position{i}; for h_1=1:length(step_size_police) % if i>delta_step(h_1) police_position{h_1}{i}=cop_rnd_move(police_position{h_1}{i-1},... L,step_size_police(h_1),h_1); end end if s_ttd == 0 if sum((thief_position{i}-treasure).^2) <= thief_treasure_sensor_radius^2 % when thief caught the treture. if s_tt == 0 disp('thief find the treasure'); s_tt = 1;% turn on the status. end end if sum((thief_position{i}-treasure).^2)<0.001 disp('thief got the treasure'); when_got_treasure = i; s_ttd = 1; end end if s_ttd == 1 if sum((thief_position{i}-escape_slot).^2)<0.001 disp('thief succeed!!'); step_num=i; break; end end for h_1=1:length(step_size_police) if sum((police_position{h_1}{i}-thief_position{i}).^2)... <= police_sensor_radius(h_1)^2 % cops find the thief. if s_ct(h_1,:) == 0 fprintf('cop %d find the thief\n',h_1); s_ct(h_1,:) = 1;% turn on the status. end end % pass on the message for hh=1:length(step_size_police) if h_1 == hh continue; end if s_ct(hh) == 1 continue; end % cop h_1 find his colleague, then pass on the message to % another cop hh if sum((police_position{h_1}{i}-police_position{hh}{i}).^2)... <= police_sensor_radius(h_1)^2 && ... sum((police_position{h_1}{i}-police_position{hh}{i}).^2)... <= police_sensor_radius(hh)^2 %fprintf('cop %d find cop %d \n',h_1,hh); s_ct(hh) = s_ct(h_1); %fprintf('cop %d know the thief position %d \n',hh); end end if sum((police_position{h_1}{i}-thief_position{i}).^2)... < 0.001 fprintf('cop %d catch the thief\n',h_1); %the result will display on the screen when the thief step_num=i; %finds the treasure or get caught by the cops. caught=1; end end if caught==1 break end if i==step_max+1 %when the total step reaches the maximum value set disp('time is up') %by the customer, the screen will display the time step_num=i; %is up. end end %% %%plot figure %This section contains how we plot the room, for i=1:step_num %the thief and the cops, as well as their sensor hold on %radius. Here we added a name tag for the thief, cir_xy=crl(enter_xy(1),enter_xy(2),enter_r); %the police and the treasure. plot(cir_xy(1,:),cir_xy(2,:),'k') text(enter_r,0,'entrence') % plot(treasure(1),treasure(2),'yo') %position of the treasure text(treasure(1)+0.02,treasure(2)+0.02,'treasure') % plot(escape_slot(1),escape_slot(2),'gx'); %escape slot text(escape_slot(1)+0.02,escape_slot(2)+0.02,'escape'); if i >= when_got_treasure p = plot(thief_position{i}(1),thief_position{i}(2),'.'); %position of the thief set(p,'color',[1, 0.6732, 0]); else plot(thief_position{i}(1),thief_position{i}(2),'r.') %position of the thief cir_xy=crl(thief_position{i}(1),thief_position{i}(2),... thief_treasure_sensor_radius); plot(cir_xy(1,:),cir_xy(2,:),'c'); end cir_xy=crl(thief_position{i}(1),thief_position{i}(2),... thief_sensor_radius); plot(cir_xy(1,:),cir_xy(2,:),'r') text(thief_position{i}(1)+0.02,thief_position{i}(2)+0.02,'theif') for h_1=1:length(step_size_police) %here controls how the police appears plot(police_position{h_1}{i}(1)+0.01,police_position{h_1}{i}(2)+0.01,'b.') cir_xy=crl(police_position{h_1}{i}(1),... %the cops apprear one by one with the randomed police_position{h_1}{i}(2),police_sensor_radius(h_1)); plot(cir_xy(1,:),cir_xy(2,:),'b') %time intervals. str=['cop' num2str(h_1)]; text(police_position{h_1}{i}(1)+0.02,police_position{h_1}{i}(2)+0.02,str) end axis([-0.6*L,0.6*L,-0.6*L,0.6*L]) axis equal if i == step_num plot([-0.5*L,-0.5*L],[0.5*L,-0.5*L],'k-') %this is how we plot plot([0.5*L,-0.5*L],[0.5*L,0.5*L],'k-') %the size of the room plot([0.5*L,0.5*L],[-0.5*L,0.5*L],'k-') plot([-0.5*L,0.5*L],[-0.5*L,-0.5*L],'k-') else plot([-0.5*L,-0.5*L],[0.5*L,-0.5*L],'m-') %this is how we plot plot([0.5*L,-0.5*L],[0.5*L,0.5*L],'m-') %the size of the room plot([0.5*L,0.5*L],[-0.5*L,0.5*L],'m-') plot([-0.5*L,0.5*L],[-0.5*L,-0.5*L],'m-') end pause(0.01) if i<step_num clf end end %% enter function function enter_pst=enter_game(enter_r) %the function that determines the entrance rand_ang=rand*2*pi; x=100*enter_r*cos(rand_ang); y=100*enter_r*sin(rand_ang); enter_pst = [round(x)/100;round(y)/100]; end %% thief move function function thief_position_new=rnd_move(thief_position_now,L,step_size_thief) dir = 0; dir_ps=[1,2,3,4]; if thief_position_now(1)+step_size_thief>0.5*L %this is the movement of the thief. dir_ps(1)=0; %the thief can move to one of the four end %directions randomly if thief_position_now(2)+step_size_thief>0.5*L dir_ps(2)=0; end if thief_position_now(1)-step_size_thief<-0.5*L dir_ps(3)=0; end if thief_position_now(2)-step_size_thief<-0.5*L dir_ps(4)=0; end % go to the escape if s_ttd == 1 if abs(escape_slot(1) - thief_position_now(1)) < 0.001 td_flag = 1; end if abs(escape_slot(2) - thief_position_now(2)) < 0.001 td_flag = 0; end if td_flag == 0 if escape_slot(1) - thief_position_now(1) > 0 dir = 1;td_flag = 1; elseif escape_slot(1) - thief_position_now(1) < 0 dir = 3;td_flag = 1; end else if escape_slot(2) - thief_position_now(2) > 0 dir = 2;td_flag =0; elseif escape_slot(2) - thief_position_now(2) < 0 dir = 4;td_flag =0; end end end % go to the treasture. if s_tt ==1 && s_ttd == 0 if abs(treasure(1) - thief_position_now(1)) < 0.001 t_flag = 1; end if abs(treasure(2) - thief_position_now(2)) < 0.001 t_flag = 0; end if t_flag == 0 if treasure(1) - thief_position_now(1) > 0 dir = 1;t_flag = 1; elseif treasure(1) - thief_position_now(1) < 0 dir = 3;t_flag = 1; end else if treasure(2) - thief_position_now(2) > 0 dir = 2;t_flag =0; elseif treasure(2) - thief_position_now(2) < 0 dir = 4;t_flag =0; end end elseif s_ttd == 0 % random steps dir_ps(find(dir_ps==0))=[]; dir=dir_ps(ceil(rand*length(dir_ps))); %this is the movement of the police end if dir==1 %the four directions that can be thief_position_new=thief_position_now+[step_size_thief;0]; %influenced by the movement of the end %thief if dir==2 thief_position_new=thief_position_now+[0;step_size_thief]; end if dir==3 thief_position_new=thief_position_now+[-step_size_thief;0]; end if dir==4 thief_position_new=thief_position_now+[0;-step_size_thief]; end end %% police move function function thief_position_new=cop_rnd_move(thief_position_now,L,step_size_thief,h) dir = 0; dir_ps=[1,2,3,4]; if thief_position_now(1)+step_size_thief>0.5*L %this is the movement of the thief. dir_ps(1)=0; %the thief can move to one of the four end %directions randomly if thief_position_now(2)+step_size_thief>0.5*L dir_ps(2)=0; end if thief_position_now(1)-step_size_thief<-0.5*L dir_ps(3)=0; end if thief_position_now(2)-step_size_thief<-0.5*L dir_ps(4)=0; end if s_ct(h) ==1 if abs(current_thife_pos(1) - thief_position_now(1)) < 0.001 c_flag =1; end if abs(current_thife_pos(2) - thief_position_now(2)) < 0.001 c_flag = 0; end if c_flag == 0 if current_thife_pos(1) - thief_position_now(1) > 0 dir = 1;c_flag = 1; elseif current_thife_pos(1) - thief_position_now(1) < 0 dir = 3;c_flag = 1; end else if current_thife_pos(2) - thief_position_now(2) > 0 dir = 2;c_flag =0; elseif current_thife_pos(2) - thief_position_now(2) < 0 dir = 4;c_flag =0; end end else % random steps dir_ps(find(dir_ps==0))=[]; dir=dir_ps(ceil(rand*length(dir_ps))); %this is the movement of the police end if dir==1 %the four directions that can be thief_position_new=thief_position_now+[step_size_thief;0]; %influenced by the movement of the end %thief if dir==2 thief_position_new=thief_position_now+[0;step_size_thief]; end if dir==3 thief_position_new=thief_position_now+[-step_size_thief;0]; end if dir==4 thief_position_new=thief_position_now+[0;-step_size_thief]; end end %% circle function function cir=crl(c_x,c_y,r) %this is how we design the circle, theta=0:0.1:2*pi; %which made use of the polar coordinates x=cos(theta)*r+c_x; %to calculate the value of the x and y y=sin(theta)*r+c_y; %axis cir=[x;y]; end end