【VRP】基于matlab模拟退火算法求解带容量的VRP问题【含Matlab源码 159期】
一、简介
模拟退火算法
著名的模拟退火算法,它是一种基于蒙特卡洛思想设计的近似求解最优化问题的方法。
一点历史——如果你不感兴趣,可以跳过
美国物理学家 N.Metropolis 和同仁在1953年发表研究复杂系统、计算其中能量分布的文章,他们使用蒙特卡罗模拟法计算多分子系统中分子的能量分布。这相当于是本文所探讨之问题的开始,事实上,模拟退火中常常被提到的一个名词就是Metropolis准则,后面我们还会介绍。
美国IBM公司物理学家 S.Kirkpatrick、C. D. Gelatt 和 M. P. Vecchi 于1983年在《Science》上发表了一篇颇具影响力的文章:《以模拟退火法进行最优化(Optimization by Simulated Annealing)》。他们借用了Metropolis等人的方法探讨一种旋转玻璃态系统(spin glass system)时,发觉其物理系统的能量和一些组合最优(combinatorial optimization)问题(著名的旅行推销员问题TSP即是一个代表例子)的成本函数相当类似:寻求最低成本即似寻求最低能量。由此,他们发展出以 Metropolis 方法为本的一套算法,并用其来解决组合问题等的寻求最优解。
几乎同时,欧洲物理学家 V.Carny 也发表了几乎相同的成果,但两者是各自独立发现的;只是Carny“运气不佳”,当时没什么人注意到他的大作;或许可以说,《Science》杂志行销全球,“曝光度”很高,素负盛名,而Carny却在另外一本发行量很小的专门学术期刊《J.Opt.Theory Appl.》发表其成果因而并未引起应有的关注。
Kirkpatrick等人受到Metropolis等人用蒙特卡罗模拟的启发而发明了“模拟退火”这个名词,因为它和物体退火过程相类似。寻找问题的最优解(最值)即类似寻找系统的最低能量。因此系统降温时,能量也逐渐下降,而同样意义地,问题的解也“下降”到最值。
一、什么是退火——物理上的由来
在热力学上,退火(annealing)现象指物体逐渐降温的物理现象,温度愈低,物体的能量状态会低;够低后,液体开始冷凝与结晶,在结晶状态时,系统的能量状态最低。大自然在缓慢降温(亦即,退火)时,可“找到”最低能量状态:结晶。但是,如果过程过急过快,快速降温(亦称「淬炼」,quenching)时,会导致不是最低能态的非晶形。
如下图所示,首先(左图)物体处于非晶体状态。我们将固体加温至充分高(中图),再让其徐徐冷却,也就退火(右图)。加温时,固体内部粒子随温升变为无序状,内能增大,而徐徐冷却时粒子渐趋有序,在每个温度都达到平衡态,最后在常温时达到基态,内能减为最小(此时物体以晶体形态呈现)。
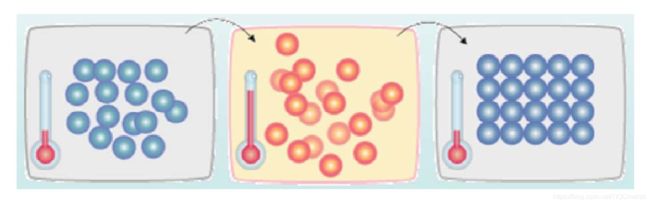
似乎,大自然知道慢工出细活:缓缓降温,使得物体分子在每一温度时,能够有足够时间找到安顿位置,则逐渐地,到最后可得到最低能态,系统最安稳。
二、模拟退火(Simulate Anneal)
如果你对退火的物理意义还是晕晕的,没关系我们还有更为简单的理解方式。想象一下如果我们现在有下面这样一个函数,现在想求函数的(全局)最优解。如果采用Greedy策略,那么从A点开始试探,如果函数值继续减少,那么试探过程就会继续。而当到达点B时,显然我们的探求过程就结束了(因为无论朝哪个方向努力,结果只会越来越大)。最终我们只能找打一个局部最后解B。
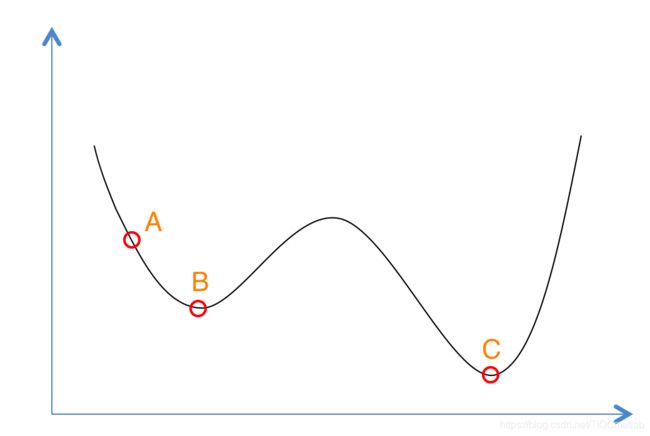
模拟退火其实也是一种Greedy算法,但是它的搜索过程引入了随机因素。模拟退火算法以一定的概率来接受一个比当前解要差的解,因此有可能会跳出这个局部的最优解,达到全局的最优解。以上图为例,模拟退火算法在搜索到局部最优解B后,会以一定的概率接受向右继续移动。也许经过几次这样的不是局部最优的移动后会到达B 和C之间的峰点,于是就跳出了局部最小值B。
根据Metropolis准则,粒子在温度T时趋于平衡的概率为exp(-ΔE/(kT)),其中E为温度T时的内能,ΔE为其改变数,k为Boltzmann常数。Metropolis准则常表示为

Metropolis准则表明,在温度为T时,出现能量差为dE的降温的概率为P(dE),表示为:P(dE) = exp( dE/(kT) )。其中k是一个常数,exp表示自然指数,且dE<0。所以P和T正相关。这条公式就表示:温度越高,出现一次能量差为dE的降温的概率就越大;温度越低,则出现降温的概率就越小。又由于dE总是小于0(因为退火的过程是温度逐渐下降的过程),因此dE/kT < 0 ,所以P(dE)的函数取值范围是(0,1) 。随着温度T的降低,P(dE)会逐渐降低。
我们将一次向较差解的移动看做一次温度跳变过程,我们以概率P(dE)来接受这样的移动。也就是说,在用固体退火模拟组合优化问题,将内能E模拟为目标函数值 f,温度T演化成控制参数 t,即得到解组合优化问题的模拟退火演算法:由初始解 i 和控制参数初值 t 开始,对当前解重复“产生新解→计算目标函数差→接受或丢弃”的迭代,并逐步衰减 t 值,算法终止时的当前解即为所得近似最优解,这是基于蒙特卡罗迭代求解法的一种启发式随机搜索过程。退火过程由冷却进度表(Cooling Schedule)控制,包括控制参数的初值 t 及其衰减因子Δt 、每个 t 值时的迭代次数L和停止条件S。
总结起来就是:
若f( Y(i+1) ) <= f( Y(i) ) (即移动后得到更优解),则总是接受该移动;
若f( Y(i+1) ) > f( Y(i) ) (即移动后的解比当前解要差),则以一定的概率接受移动,而且这个概率随着时间推移逐渐降低(逐渐降低才能趋向稳定)相当于上图中,从B移向BC之间的小波峰时,每次右移(即接受一个更糟糕值)的概率在逐渐降低。如果这个坡特别长,那么很有可能最终我们并不会翻过这个坡。如果它不太长,这很有可能会翻过它,这取决于衰减 t 值的设定。
关于普通Greedy算法与模拟退火,有一个有趣的比喻:
普通Greedy算法:兔子朝着比现在低的地方跳去。它找到了不远处的最低的山谷。但是这座山谷不一定最低的。这就是普通Greedy算法,它不能保证局部最优值就是全局最优值。
模拟退火:兔子喝醉了。它随机地跳了很长时间。这期间,它可能走向低处,也可能踏入平地。但是,它渐渐清醒了并朝最低的方向跳去。这就是模拟退火。
车辆路径问题(VRP)
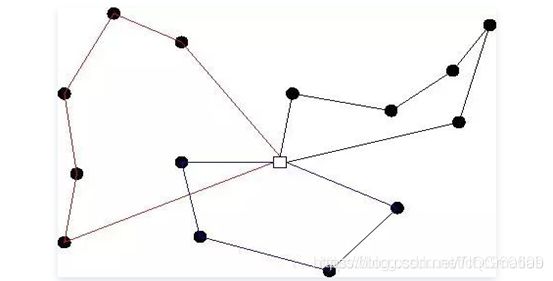
车辆路径问题(VRP)最早是由 Dantzig 和 Ramser 于1959年首次提出,它是指一定数量的客户,各自有不同数量的货物需求,配送中心向客户提供货物,由一个车队负责分送货物,组织适当的行车路线,目标是使得客户的需求得到满足,并能在一定的约束下,达到诸如路程最短、成本最小、耗费时间最少等目的。
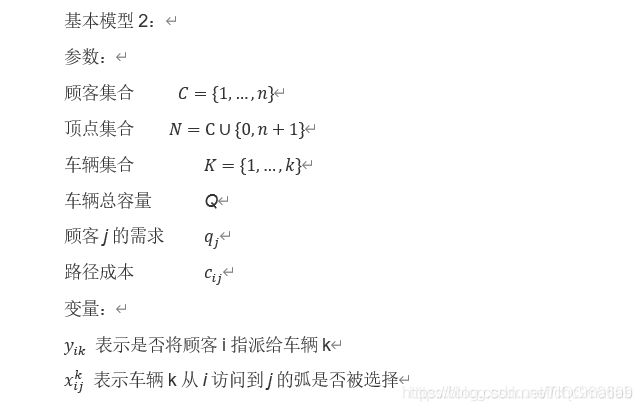
2.1 带有容量约束的车辆路径问题(CVRP)
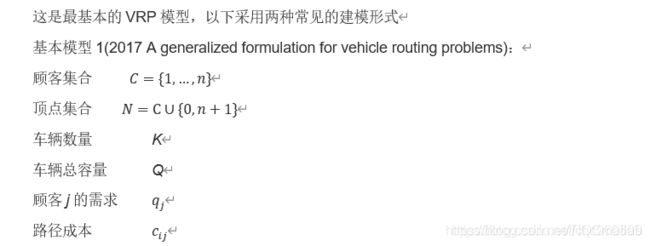
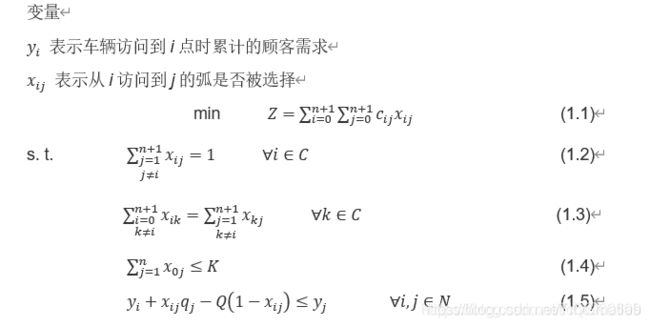

该模型很难拓展到VRP的其他场景,并且不知道具体车辆的执行路径,因此对其模型继续改进。



二、源代码
tic
clear
clc
%% 用importdata这个函数来读取文件
data=importdata('rc208.txt');
cap=1000;
%% 提取数据信息
vertexs=data(:,2:3); %所有点的坐标x和y
customer=vertexs(2:end,:); %顾客坐标
cusnum=size(customer,1); %顾客数
v_num=25; %初始车辆使用数目
demands=data(2:end,4); %需求量
h=pdist(vertexs);
dist=squareform(h); %成本矩阵
%% 模拟退火参数
belta=10; %违反的容量约束的惩罚函数系数
MaxOutIter=2000; %外层循环最大迭代次数
MaxInIter=300; %里层循环最大迭代次数
T0=100; %初始温度
alpha=0.99; %冷却因子
pSwap=0.2; %选择交换结构的概率
pReversion=0.5; %选择逆转结构的概率
pInsertion=1-pSwap-pReversion; %选择插入结构的概率
N=cusnum+v_num-1; %解长度=顾客数目+车辆最多使用数目-1
%% 随机构造初始解
currS=randperm(N); %随机构造初始解
[currVC,NV,TD,violate_num,violate_cus]=decode(currS,cusnum,cap,demands,dist); %对初始解解码
currCost=costFuction(currVC,dist,demands,cap,belta); %求初始配送方案的成本=车辆行驶总成本+alpha*违反的容量约束之和
Sbest=currS; %初始将全局最优解赋值为初始解
bestVC=currVC; %初始将全局最优配送方案赋值为初始配送方案
bestCost=currCost; %初始将全局最优解的总成本赋值为初始解总成本
BestCost=zeros(MaxOutIter,1); %记录每一代全局最优解的总成本
T=T0; %温度初始化
%% 模拟退火
for outIter=1:MaxOutIter
for inIter=1:MaxInIter
newS=Neighbor(currS,pSwap,pReversion,pInsertion); %经过邻域结构后产生的新的解
newVC=decode(newS,cusnum,cap,demands,dist); %对新解进行解码
newCost=costFuction(newVC,dist,demands,cap,belta); %求初始配送方案的成本=车辆行驶总成本+alpha*违反的容量约束之和
%如果新解比当前解更好,则更新当前解,以及当前解的总成本
if newCost<=currCost
currS=newS;
currVC=newVC;
currCost=newCost;
else
%如果新解不如当前解好,则采用退火准则,以一定概率接受新解
delta=(newCost-currCost)/currCost; %计算新解与当前解总成本相差的百分比
P=exp(-delta/T); %计算接受新解的概率
%如果0~1的随机数小于P,则接受新解,并更新当前解,以及当前解总成本
if rand<=P
currS=newS;
currVC=newVC;
currCost=newCost;
end
end
%将当前解与全局最优解进行比较,如果当前解更好,则更新全局最优解,以及全局最优解总成本
if currCost<=bestCost
Sbest=currS;
bestVC=currVC;
bestCost=currCost;
end
end
%记录外层循环每次迭代的全局最优解的总成本
BestCost(outIter)=bestCost;
%显示外层循环每次迭代的信全局最优解的总成本
disp(['第',num2str(outIter),'代全局最优解:'])
[bestVC,bestNV,bestTD,best_vionum,best_viocus]=decode(Sbest,cusnum,cap,demands,dist);
disp(['车辆使用数目:',num2str(bestNV),',车辆行驶总距离:',num2str(bestTD),',违反约束路径数目:',num2str(best_vionum),',违反约束顾客数目:',num2str(best_viocus)]);
fprintf('\n')
%更新当前温度
T=alpha*T;
end
%% 打印外层循环每次迭代的全局最优解的总成本变化趋势图
figure;
plot(BestCost,'LineWidth',1);
title('全局最优解的总成本变化趋势图')
xlabel('迭代次数');
ylabel('总成本');
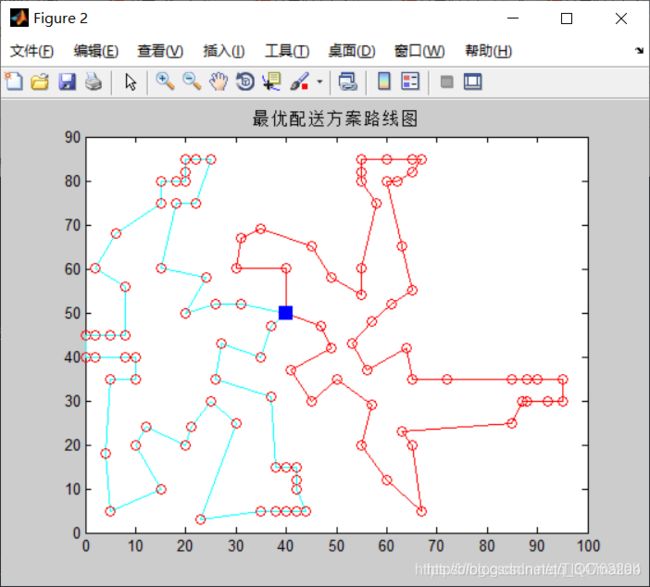
%% 打印全局最优解路线图
draw_Best(bestVC,vertexs);
toc
三、运行结果
四、备注
版本:2014a