【智能驾驶】基于合成雷达的传感器融合的智能驾驶MATLAB仿真
% Define an empty scenario.
scenario = drivingScenario;
scenario.SampleTime = 0.01;
%%
% Add a stretch of 500 meters of typical highway road with two lanes. The
% road is defined using a set of points, where each point defines the center of
% the road in 3-D space.
roadCenters = [0 0; 50 0; 100 0; 250 20; 500 40];
road(scenario, roadCenters, 'lanes',lanespec(2));
%%
% Create the ego vehicle and three cars around it: one that overtakes the
% ego vehicle and passes it on the left, one that drives right in front of
% the ego vehicle and one that drives right behind the ego vehicle. All the
% cars follow the trajectory defined by the road waypoints by using the
% |trajectory| driving policy. The passing car will start on the right
% lane, move to the left lane to pass, and return to the right lane.
% Create the ego vehicle that travels at 25 m/s along the road. Place the
% vehicle on the right lane by subtracting off half a lane width (1.8 m)
% from the centerline of the road.
egoCar = vehicle(scenario, 'ClassID', 1);
trajectory(egoCar, roadCenters(2:end,:) - [0 1.8], 25); % On right lane
% Add a car in front of the ego vehicle
leadCar = vehicle(scenario, 'ClassID', 1);
trajectory(leadCar, [70 0; roadCenters(3:end,:)] - [0 1.8], 25); % On right lane
% Add a car that travels at 35 m/s along the road and passes the ego vehicle
passingCar = vehicle(scenario, 'ClassID', 1);
waypoints = [0 -1.8; 50 1.8; 100 1.8; 250 21.8; 400 32.2; 500 38.2];
trajectory(passingCar, waypoints, 35);
% Add a car behind the ego vehicle
chaseCar = vehicle(scenario, 'ClassID', 1);
trajectory(chaseCar, [25 0; roadCenters(2:end,:)] - [0 1.8], 25); % On right lane
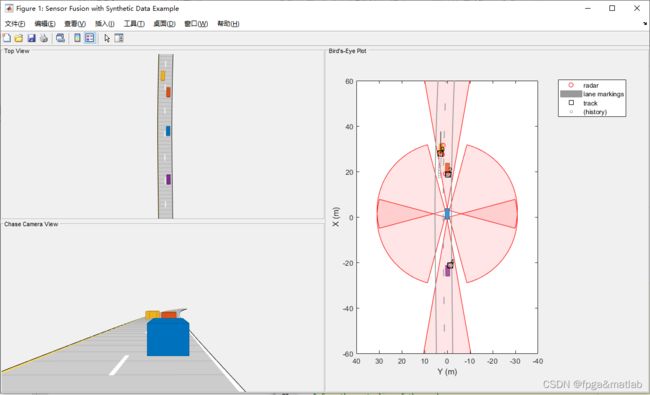
%% Define Radar Sensors
% Simulate an ego vehicle that has 6 radar sensors and
% The ego vehicle is equipped with a
% long-range radar sensor. Each side of the vehicle has two short-range radar
% sensors, each covering 90 degrees. One sensor on each side covers from
% the middle of the vehicle to the back. The other sensor on each side
% covers from the middle of the vehicle forward. The figure in the next
% section shows the coverage.
sensors = cell(6,1);
% Front-facing long-range radar sensor at the center of the front bumper of the car.
sensors{1} = radarDetectionGenerator('SensorIndex', 1, 'Height', 0.2, 'MaxRange', 174, ...
'SensorLocation', [egoCar.Wheelbase + egoCar.FrontOverhang, 0], 'FieldOfView', [20, 5]);
% Rear-facing long-range radar sensor at the center of the rear bumper of the car.
sensors{2} = radarDetectionGenerator('SensorIndex', 2, 'Height', 0.2, 'Yaw', 180, ...
'SensorLocation', [-egoCar.RearOverhang, 0], 'MaxRange', 174, 'FieldOfView', [20, 5]);
% Rear-left-facing short-range radar sensor at the left rear wheel well of the car.
sensors{3} = radarDetectionGenerator('SensorIndex', 3, 'Height', 0.2, 'Yaw', 120, ...
'SensorLocation', [0, egoCar.Width/2], 'MaxRange', 30, 'ReferenceRange', 50, ...
'FieldOfView', [90, 5], 'AzimuthResolution', 10, 'RangeResolution', 1.25);
% Rear-right-facing short-range radar sensor at the right rear wheel well of the car.
sensors{4} = radarDetectionGenerator('SensorIndex', 4, 'Height', 0.2, 'Yaw', -120, ...
'SensorLocation', [0, -egoCar.Width/2], 'MaxRange', 30, 'ReferenceRange', 50, ...
'FieldOfView', [90, 5], 'AzimuthResolution', 10, 'RangeResolution', 1.25);
% Front-left-facing short-range radar sensor at the left front wheel well of the car.
sensors{5} = radarDetectionGenerator('SensorIndex', 5, 'Height', 0.2, 'Yaw', 60, ...
'SensorLocation', [egoCar.Wheelbase, egoCar.Width/2], 'MaxRange', 30, ...
'ReferenceRange', 50, 'FieldOfView', [90, 5], 'AzimuthResolution', 10, ...
'RangeResolution', 1.25);
% Front-right-facing short-range radar sensor at the right front wheel well of the car.
sensors{6} = radarDetectionGenerator('SensorIndex', 6, 'Height', 0.2, 'Yaw', -60, ...
'SensorLocation', [egoCar.Wheelbase, -egoCar.Width/2], 'MaxRange', 30, ...
'ReferenceRange', 50, 'FieldOfView', [90, 5], 'AzimuthResolution', 10, ...
'RangeResolution', 1.25);
%% Create a Tracker
% Create a || to track
% the vehicles that are close to the ego vehicle. The tracker uses the
% |initSimDemoFilter| supporting function to initialize a constant velocity
% linear Kalman filter that works with position and velocity.
%
% Tracking is done in 2-D. Although the sensors return measurements in 3-D,
% the motion itself is confined to the horizontal plane, so there is no
% need to track the height.
%% TODO*
%Change the Tracker Parameters and explain the reasoning behind selecting
%the final values. You can find more about parameters here: https://www.mathworks.com/help/driving/ref/multiobjecttracker-system-object.html
tracker = multiObjectTracker('FilterInitializationFcn', @initSimDemoFilter, ...
'AssignmentThreshold', 30, 'ConfirmationParameters', [4 5], 'NumCoastingUpdates', 5);
positionSelector = [1 0 0 0; 0 0 1 0]; % Position selector
velocitySelector = [0 1 0 0; 0 0 0 1]; % Velocity selector
% Create the display and return a handle to the bird's-eye plot
BEP = createDemoDisplay(egoCar, sensors);
%% Simulate the Scenario
% The following loop moves the vehicles, calls the sensor simulation, and
% performs the tracking.
%
% Note that the scenario generation and sensor simulation can have
% different time steps. Specifying different time steps for the scenario
% and the sensors enables you to decouple the scenario simulation from the
% sensor simulation. This is useful for modeling actor motion with high
% accuracy independently from the sensor's measurement rate.
%
% Another example is when the sensors have different update rates. Suppose
% one sensor provides updates every 20 milliseconds and another sensor
% provides updates every 50 milliseconds. You can specify the scenario with
% an update rate of 10 milliseconds and the sensors will provide their
% updates at the correct time.
%
% In this example, the scenario generation has a time step of 0.01 second,
% while the sensors detect every 0.1 second. The sensors return a logical
% flag, |isValidTime|, that is true if the sensors generated detections.
% This flag is used to call the tracker only when there are detections.
%
% Another important note is that the sensors can simulate multiple
% detections per target, in particular when the targets are very close to
% the radar sensors. Because the tracker assumes a single detection per
% target from each sensor, you must cluster the detections before the
% tracker processes them. This is done by the function |clusterDetections|.
% See the 'Supporting Functions' section.
toSnap = true;
while advance(scenario) && ishghandle(BEP.Parent)
% Get the scenario time
time = scenario.SimulationTime;
% Get the position of the other vehicle in ego vehicle coordinates
ta = targetPoses(egoCar);
% Simulate the sensors
detections = {};
isValidTime = false(1,6);
for i = 1:6
[sensorDets,numValidDets,isValidTime(i)] = sensors{i}(ta, time);
if numValidDets
detections = [detections; sensorDets]; %#ok
end
end
% Update the tracker if there are new detections
if any(isValidTime)
vehicleLength = sensors{1}.ActorProfiles.Length;
detectionClusters = clusterDetections(detections, vehicleLength);
confirmedTracks = updateTracks(tracker, detectionClusters, time);
% Update bird's-eye plot
updateBEP(BEP, egoCar, detections, confirmedTracks, positionSelector, velocitySelector);
end
% Snap a figure for the document when the car passes the ego vehicle
if ta(1).Position(1) > 0 && toSnap
toSnap = false;
snapnow
end
end
D203