Ros using step by step
ROS
- catkin workspace(update in 2020-07-16)
- Edited in the third time
-
- How to set the catkin workspace
- ORB-SLAM2 with ROS
-
- code source:
-
- ROS example:
- Thanks:
catkin workspace(update in 2020-07-16)
Edited in the third time
- workspace_folder/ − w o r k s p a c e - \bf workspace −workspace
- src/ − s o u r c e s p a c e -sourcespace −sourcespace
- CMakeLists.txt – The ‘toplevel’ CMake file
- package_1/
- CMakeLists.txt
- package.xml
…
- package_n/
- CATKIN_IGNORE – Optional empty file to exclude package_n from being processed
- CMakeLists.txt
- package.xml
…
- build/ – BUILD SPACE
- CATKIN_IGNORE – Keeps catkin from walking this directory
- devel/ – DEVELOPMENT SPACE (set by CATKIN_DEVEL_PREFIX)
- bin/
- etc/
- include/
- lib/
- share/
- .catkin
- env.bash
- setup.bash
- setup.sh
…
- install/ – INSTALL SPACE (set by CMAKE_INSTALL_PREFIX)
- bin/
- etc/
- include/
- lib/
- share/
- .catkin
- env.bash
- setup.bash
- setup.sh
…
- src/ − s o u r c e s p a c e -sourcespace −sourcespace
How to set the catkin workspace
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
create the catkin_workspace
cd ..
catkin_make
if you wanna set the env of install
catkin_make install
create the pkg
cd ~/catkin_ws/src
catkin_create_pkg test_pkg roscpp rospy std_msgs
command:
rospack find package_name
## find the root of the package
rospack list
## list the package in the catkin_ws
roscd package_name
## jump into the package
rosls package_name
## show the info about this package
roscd package_name file_name
##
catkin_create_pkg <pkg_name> [deps]
## create the package with dependence
rosdep install [pkg_names]
## install the dependence
## you can install tree the folder root
sudo apt install tree
## you can use command tree to show the folder
tree -L 1
.bashrc file you can edit the command with terminal
##bash the source
gedit ~/.bashrc
rosnode list
rosnode info
rosnode kill
roslaunch [pkg_name][file_name.launch]
ORB-SLAM2 with ROS
code source:
we need to download the ORB-SLAM2 code source :
https://github.com/raulmur/ORB_SLAM2
https://github.com/DroidAITech/ROS-Academy-for-Beginners
Warning: if you ROS version is melodic plz choose the branch of the melodic
step1:
init the catkin workspace :
mkdir -p WorkspaceROS/catkin_ws/src
cd WorkspaceROS/catkin_ws
catkin_make
# active the env
source devel/setup.bash
#you should put the ROS-Academy-for-Beginners in the /src/ file
#and you should install some needed package
rosdep install --from-paths src --ignore-src --rosdistro=melodic -y
#if you kinect you should rewrite the melodic
# you alse could add this command in the ~/.bashrc
# you can edit this file with gedit and add the line
step2:
set the third part of the OpenCV and Pangolin eigen3
you can find this from my blog in the past i won’t write in this blog
step3:
get the code from the website of github
git clone https://github.com/raulmur/ORB_SLAM2.git
#we need set the ./bashrc
#this command is will be OK :
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/【本机名】/catkin_ws/src/ORB_SLAM2/Examples/ROS
#i choose gedit ~/.bashrc and the edit by my way
#just add the ROS file in the root env
cd ORB_SLAM2
chmod +x build.sh
./build.sh
chmod +x build_ros.sh
./build_ros.sh
step4: 在//home/本机/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src下找到ros_rgbd.cc
step5:line68和line69用下列代码替换:
message_filters::Subscriber rgb_sub(nh, "/camera/rgb/image_raw", 1);
message_filters::Subscriber depth_sub(nh, "camera/depth/image_raw", 1);
step6:重新编译,回到ORB_SLAM2/下执行:./build_ros.sh
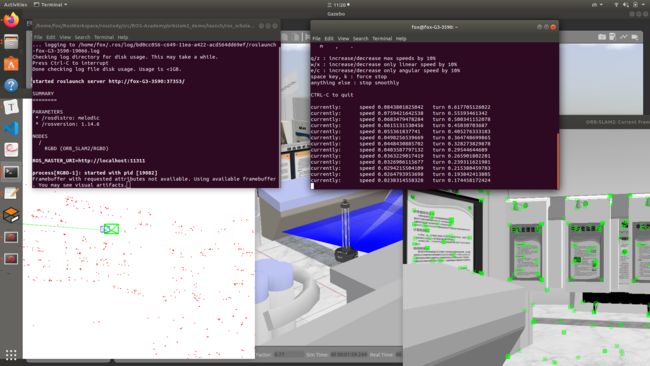
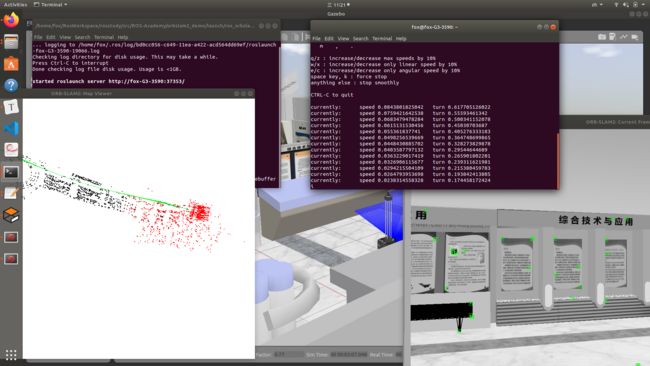
step7: open the terminal and input the command
roslaunch robot_sim_demo robot_spawn.launch
#first one
roslaunch orbslam2_demo ros_orbslam2.launch
#second one
rosrun robot_sim_demo robot_keyboard_teleop.py
#third one
you will get this pic :
ROS example:
Building traffic light detection and controlling vehicle model movement in ROS based on paddledetection
Env Melodic ROS
step1.
mkdir ~/race_car/src
cd ~/race_car/src
catkin_init_workspace
# init catkin workspace
git clone https://github.com/xmy0916/racecar
# you could download directly by using the website
# and when you using git clone maybe download too slow
# that you cannot stand
step2.may be you should install third part control assembly
You sholud use this command show in below
sudo apt-get install ros-melodic-driver-base
sudo apt-get install ros--melodic-gazebo-ros-control
sudo apt-get install ros--melodic-effort-controllers
sudo apt-get install ros--melodic-joint-state-controller
sudo apt-get install ros-melodic-ackermann-msgs
sudo apt-get install ros-melodic-global-planner
sudo apt-get install ros-melodic-teb-local-planner
error message output :
Could not find a package configuration file provided by "OpenCV" with any
of the following names:
OpenCVConfig.cmake
opencv-config.cmake
Fixed the problem by adding the line set(OpenCV_DIR /usr/share/OpenCV/) before the find_package() command in my cmakelists file.
Could not find a package configuration file provided by “OpenCV”
this code will find your opencv build target location
locate OpenCVConfig.cmake
and you can find out which one DIR has his opencvcmakelist.txt
go to the command
gedit ~/catkin_ws/src/racecar-master/racecar_gazebo/CMakeLists.txt
ros-melodic-cv-bridge or ros-kinect you must be sure which version you have install
sudo apt-get install python-catkin-tools python3-dev python3-catkin-pkg-modules python3-numpy python3-yaml ros-kinetic-cv-bridge
then :re edit the line 7 may be line 7 to set the OPENCV_DIR
cv_bridge uses opencv3.2
Next:you should create a env to make the workspace cvbridge
mkdir catkin_workspace
cd catkin_workspace
catkin init
Then catkin the python in the catkin_workspace
catkin config -DPYTHON_EXECUTABLE=/usr/bin/python -DPYTHON_INCLUDE_DIR=/usr/include/python3.6m -DPYTHON_LIBRARY=/usr/lib/x86_64-linux-gnu/libpython3.6m.so
catkin config --install
git clone https://github.com/ros-perception/vision_opencv.git src/vision_opencv
Then check out the melodic cvbridge and grep version:
may be you run in the linux 16.04 and then you should use the kinect instead of the melodic
apt-cache show ros-melodic-cv-bridge | grep Version
Then check the git
git checkout 1.12.8
this step have a question of this command
cd ../../
catkin build cv_bridge
source install/setup.bash --extend
error:
Could not find the following Boost libraries:
boost_python37
Unable to find the requested Boost libraries.
Boost version: 1.65.1
Boost include path: /usr/include
Thanks:
- https://blog.csdn.net/qq_44830040/article/details/107032569?%3E
- http://www.luyixian.cn/news_show_402183.aspx this website using for solve the racecar github code’s error
- https://blog.csdn.net/bigdog_1027/article/details/79092263 this website tell you how setup the CmakeLists.txt about the opencv
- https://aur.archlinux.org/packages/ros-melodic-cv-bridge/ find out linux package