【AUTOSAR-CAN】CAN的 “BasicCAN架构” 和 “FullCAN架构”
(将本文讨论的 “BasicCAN” 和 “FullCAN” 称为 ”BasicCAN架构“ 和 ”FullCAN架构”,具体原因后面解释)
1.“BasicCAN架构” 和 “FullCAN架构”
CAN的Basic和Full类型,在配置Can的时候,这个配置项困扰了我很久。
摘自 Specification of CAN Transceiver Driver 4.0.3
https://www.autosar.org/fileadmin/user_upload/standards/classic/4-0/AUTOSAR_SWS_CANDriver.pdf
Basic:一个Hardware Object可以处理多个L-PDU
Full:一个Hardware Object只可以处理一个L-PDU
这个参数只会被CanIf使用,用于配置FilterMask和ID。

查了一圈,资料不算多,这个Basic和Full常常会让人和 CAN2.0A 和 CAN2.0B 混淆,然后在这个网站找到了比较靠谱的解释。
http://www.can-wiki.info/doku.php?id=can_faq:can_faq_basic_full
最开始只有一种CAN Controller,它被设计成了具有一定数量的报文buffer的形式。比如已经作古的Intel 82526(有5个message buffer),以及他的继任者82527拥有15个message buffer。于是飞利浦想着降低成本,就有了只有两个接收buffer和一个发送buffer的82C200,当然也有部分掩码过滤。为了区分这两种CanController,有些人开始叫最开始的为 “FullCAN架构” ,后来的低成本为 “BasicCAN架构” 。
对于 “FullCAN架构” 还是 “BasicCAN架构” 其实在式样上没有一个明确的定义,取决于生产商。“FullCAN架构” 应该被叫做 “DPRAM” 架构,而 “BasicCAN架构” 则应该被称作“FIFO”架构。并且应当注意“FullCAN”并不是“BasicCAN”的某种完全版本
原初的82527的实现后来被西门子用在了他们的控制器里,现在可以在C505C/C515C/C164/C167中找到身影。
新的CanController(BasicCan的那个)扩展了基础功能,比如扩展到了32个buffer,可以用于实现FullCan模式,或者对于几个message相对拥有了较大的FIFO,比如飞利浦的SJA1000的PeliCAN,实现了BasicCAN模式(~实在是太绕了,SJA1000本身有一个BasicCAN模式,是和PeliCAN相对的,结果这个PeliCAN才是”BasicCAN架构“~)。对于大多数的控制器是融合了上面的两种CanController的。他们大多数是以FullCAN来实现的,但是也可以用其中的部分Buffer来实现BasicCAN架构。
于是就常常会问道,那种CANController更好
“FullCAN”和“BasicCAN”是两种不同的CANController的架构。“FullCAN架构”通常有多于一个的message buffer。可以以这种方式对接收寄存器进行编程,只有一个特定的消息(或一组)传递到该Buffer中。但大多数的实现并不会缓存接收队列的message,意味着后续的message通过接受过滤后会替换之前的,而之前的就会被丢失。如果两个ID相同但是数据不同的message要以很快的速度发送,那么CPU就必须快速的发送出去避免新的message的覆盖
典型的“BasicCAN架构”控制器(飞利浦的SJA1000)本身具有接收队列,而没有缓存区
那种架构更好,取决于应用场合。如果只是用少数的message,并且小于所具有的message buffer的话,也许“FullCAN架构”更好。较新的CPU具有两种CANController。另一方面,如果你想看到所有的报文,则FIFO模式的CANController则更好。

大意就是,这个Basic和Full是针对CAN Controller的缓存架构来说的,而 CAN2.0A 和 CAN2.0B 是CAN的通信协议。
"BasicCAN架构“的主要特征是以FIFO的方式buffer特定ID的报文,可以缓存一定的历史报文。
”FullCAN架构“的主要特征是,一个Buffer对应一个ID的报文,而且新的报文会覆盖旧的报文,并不会缓存。
可以看到只有一个Transmit Buffer和FIFO类型的Recieve Buffer。对于CPU的负担来说稍重

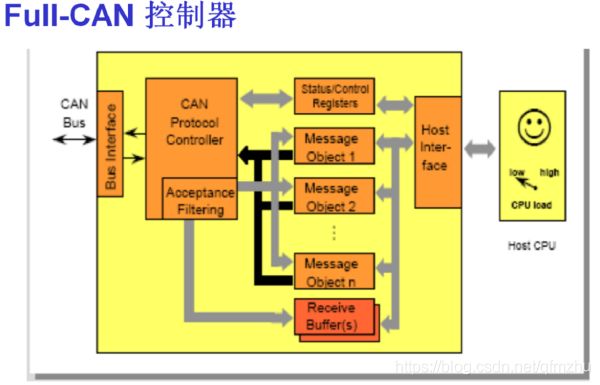
有多个message Object Buffer的存在,对于CPU的负担来说稍低。
2.回归问题
那么根据实际的项目来看,一般的Com报文都会被要求配置成Full,而诊断的报文不论接收都要配置成Basic模式,然后NM网络管理的报文,接受的要配置成Basic,而发送则是Full和Basic都可以。
结合架构上的区别来看,可能对于一般的Com报文,并不需要历史报文的保留。所以对于某一个ID的报文并不需要buffer它。
而诊断的报文则是遵循诊断的一个要求,首先诊断的报文以接收为例,是只有一个ID,然后基于UDS的协议在这一个ID的报文里做文章,所以如果采用”FullCAN“的新报文覆盖旧报文的架构的话明显是不合理的,而且(具体我还得查证)UDS是有要求接收到的报文都要处理不能丢弃的。
另一方面,网络管理的报文,对于接受来说其实是一个报文区间,”FullCAN“对此也并不合理。而发送目前是配置成了Full,因为对于发送来说就一个特定的ID的报文。理应是Full。
3.CAN的各种分类
| Classical CAN | CAN-FD | |
| CAN 2.0A | CAN 2.0B | 不同于Classical CAN的另一个东西 |
| 8Byte数据场,只支持“11bit”的ID,称为标准模式 | 8Byte数据场可以是“11bit”的标准模式,也可以是“29bit”,的扩展模式 | 最大64Byte的数据场 |