【计算机视觉实验】利用均值滤波器、高斯滤波、中值滤波、双边滤波等进行除噪
利用均值滤波器、高斯滤波、中值滤波、双边滤波等进行除噪
一、基本概念
- 什么是均值滤波器?
均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围8个像素,构成一个滤波模板,即包括目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
均值滤波也称为线性滤波,其采用的主要方法为邻域平均法。线性滤波的基本原理是用均值代替原图像中的各个像素值,即对待处理的当前像素点(x,y),选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(x,y),作为处理后图像在该点上的灰度g(x,y),即g(x,y)=∑f(x,y)/m m为该模板中包含当前像素在内的像素总个数。
- 低通滤波器与高通滤波器?
前者用于消除噪声,后者用于提取边缘。低通滤波(Low-pass filter) 是一种过滤方式,规则为低频信号能正常通过,而超过设定临界值的高频信号则被阻隔、减弱。但是阻隔、减弱的幅度则会依据不同的频率以及不同的滤波程序(目的)而改变。它有的时候也被叫做高频去除过滤(high-cut filter)或者最高去除过滤(treble-cut filter)。低通过滤是高通过滤的对立。高通滤波器,又称低截止滤波器、低阻滤波器,允许高于某一截频的频率通过,而大大衰减较低频率的一种滤波器。它去掉了信号中不必要的低频成分或者说去掉了低频干扰。
- 核是什么?
1) 核表示一个二维大小的矩阵
2) 核中不同的值可以表示不同的算法,请根据1中介绍的均值滤波器中的核的概念进行推导
-
应用到的算法+opencv实现

-
均值滤波/盒型模型?
盒子滤波是一种非常有用的线性滤波,也叫方框滤波,最简单的均值滤波就是盒子滤波归一化的情况。应用:可以说,一切需要求某个邻域内像素之和的场合,都有盒子滤波的用武之地,比如:均值滤波、引导滤波、计算Haar特征等等。优势:就一个字:快!它可以使复杂度为O(MN)的求和,求方差等运算降低到O(1)或近似于O(1)的复杂度,也就是说与邻域尺寸无关了。
其主要功能是:在给定的滑动窗口大小下,对每个窗口内的像素值进行快速相加求和
在模式识别领域,Haar特征是大家非常熟悉的一种图像特征了,它可以应用于许多目标检测的算法中。与Haar相似,图像的局部矩形内像素的和、平方和、均值、方差等特征也可以用类似Haar特征的计算方法来计算。这些特征有时会频繁的在某些算法中使用,因此对它的优化势在必行。Boxfilter就是这样一种优化方法,它可以使复杂度为O(MN)的求和,求方差等运算降低到O(1)或近似于O(1)的复杂度,它的缺点是不支持多尺度。。
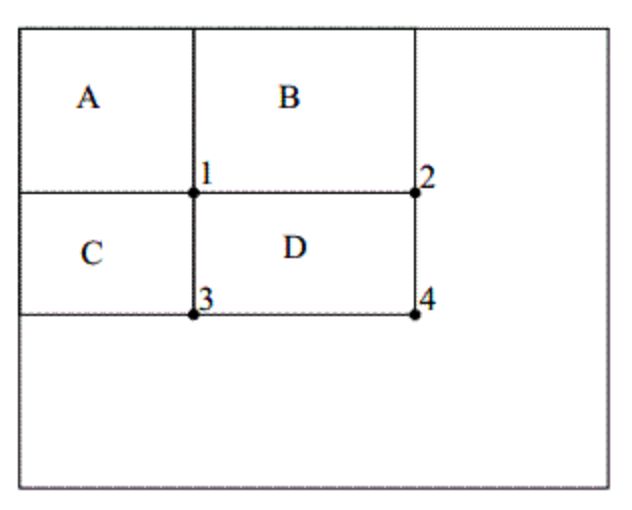
第一个提出Haar特征快速计算方法的是CVPR2001上的那篇经典论文Rapid Object Detection using a Boosted Cascade of Simple Features ,它提出了integral image的概念,这个方法使得图像的局部矩形求和运算的复杂度从O(MN)下降到了O(4)。它的原理很简单:首先建立一个数组A,宽高与原图像相等,然后对这个数组赋值,每个元素的值A[i]赋为该点与图像原点所构成的矩形中所有像素的和。初始化之后,想要计算某个矩形像素和的时候可以采用如下方法:如图D矩形的像素和就等于A[4] – A[2] – A[3] + A[1],共4次运算,即O(4)。Integral Image极大的提高了Haar特征的计算速度,它的优点在于能够快速计算任意大小的矩形求和运算。
Boxfilter的原理有点类似Integral Image,而且比它还要快,但是实现步骤比较复杂。在计算矩形特征之前,Boxfilter与Integral Image都需要对图像进行初始化(即对数组A赋值),不同于Integral Image, Boxfilter的数组A中的每个元素的值是该像素邻域内的像素和(或像素平方和),在需要求某个矩形内像素和的时候,直接访问数组中对应的位置就可以了。因此可以看出它的复杂度是O(1)。
Boxfilter的初始化过程如下:
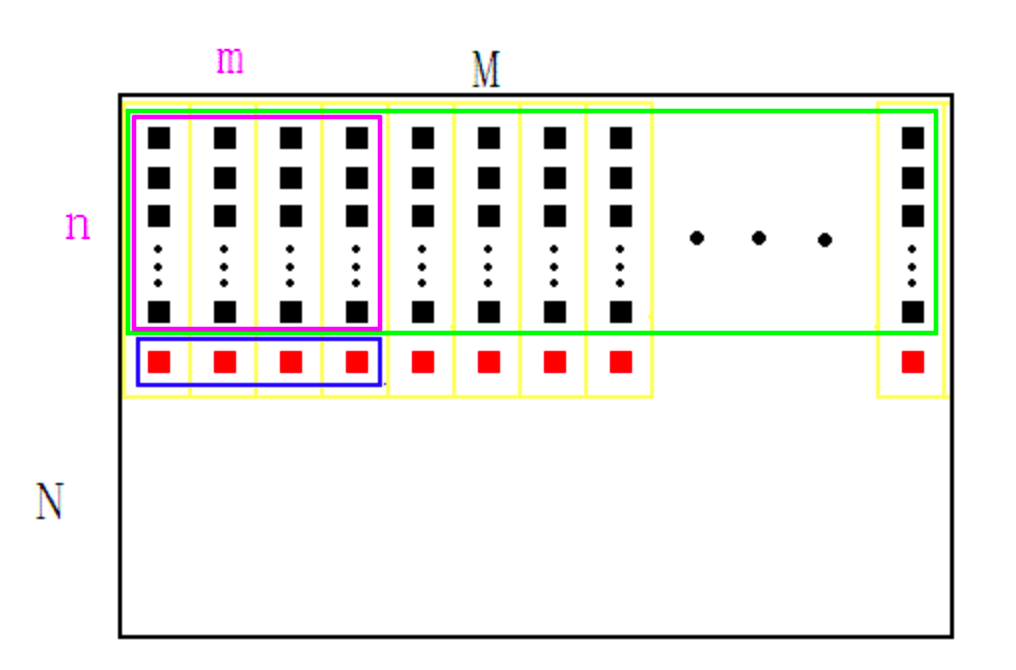
1、给定一张图像,宽高为(M,N),确定待求矩形模板的宽高(m,n),如图紫色矩形。图中每个黑色方块代表一个像素,红色方块是假想像素。
2、开辟一段大小为M的数组,记为buff, 用来存储计算过程的中间变量,用红色方块表示
3、将矩形模板(紫色)从左上角(0,0)开始,逐像素向右滑动,到达行末时,矩形移动到下一行的开头(0,1),如此反复,每移动到一个新位置时,计算矩形内的像素和,保存在数组A中。以(0,0)位置为例进行说明:首先将绿色矩形内的每一列像素求和,结果放在buff内(红色方块),再对蓝色矩形内的像素求和,结果即为紫色特征矩形内的像素和,把它存放到数组A中,如此便完成了第一次求和运算。
4、每次紫色矩形向右移动时,实际上就是求对应的蓝色矩形的像素和,此时只要把上一次的求和结果减去蓝色矩形内的第一个红色块,再加上它右面的一个红色块,就是当前位置的和了,用公式表示 sum[i] = sum[i-1] - buff[x-1] + buff[x+m-1]
5、当紫色矩形移动到行末时,需要对buff进行更新。因为整个绿色矩形下移了一个像素,所以对于每个buff[i], 需要加上一个新进来的像素,再减去一个出去的像素,然后便开始新的一行的计算了。
Boxfilter的初始化过程非常快速,每个矩形的计算基本上只需要一加一减两次运算。从初始化的计算速度上来说,Boxfilter比Integral Image要快一些,大约25%。在具体求某个矩形特征时,Boxfilter比Integral Image快4倍,所谓的4倍其实就是从4次加减运算降低到1次,虽然这个优化非常渺小,但是把它放到几层大循环里面,还是能节省一些时间的。对于那些实时跟踪检测算法,一帧的处理时间要严格在40ms以下,正是这些细小的优化决定了程序的效率,积少成多,聚沙成塔。
二、实验代码
import numpy as np
import cv2
import matplotlib.pyplot as plt
######## 四个不同的滤波器 #########
img = cv2.imread('cat.jpg')
# 均值滤波
img_mean = cv2.blur(img, (5,5))
# 高斯滤波
img_Guassian = cv2.GaussianBlur(img,(5,5),0)
# 中值滤波
img_median = cv2.medianBlur(img, 5)
# 双边滤波
img_bilater = cv2.bilateralFilter(img,9,75,75)
# 展示不同的图片
titles = ['srcImg','mean', 'Gaussian', 'median', 'bilateral']
imgs = [img, img_mean, img_Guassian, img_median, img_bilater]
for i in range(5):
plt.subplot(2,3,i+1)#注意,这和matlab中类似,没有0,数组下标从1开始
plt.imshow(imgs[i])
plt.title(titles[i])
plt.show()
三、实验结果
- 对具有高斯噪声的图片进行处理的结果如下。我个人觉得中值最好,其次是高斯。

- 对具有椒盐噪声的图片进行处理的结果如下。说实话我觉得中值滤波处理的最好,其次是均值。

参考资料
[1] 百度百科 https://baike.baidu.com/item/%E4%BD%8E%E9%80%9A%E6%BB%A4%E6%B3%A2
[2] 百度百科 https://baike.baidu.com/item/%E9%AB%98%E9%80%9A%E6%BB%A4%E6%B3%A2%E5%99%A8
[3] 月下花弄影 python+opencv均值滤波,高斯滤波,中值滤波,双边滤波 https://blog.csdn.net/qq_27261889/article/details/80822270
[4] 奇妙的代码之旅 盒式滤波器Box Filter https://www.cnblogs.com/lwl2015/p/4460711.html