ROS::点云PCL(3)直通滤波
理解
在获取点云数据时,由于设备精度、操作者经验、环境因素等带来的影响,以及电磁波衍射特性、被测物体表面性质变化和数据拼接配准操作过程的影响,点云数据中将不可避免地出现一些噪声点。实际应用中除了这些测量随机误差产生的噪声点之外,由于受到外界干扰如视线遮挡、障碍物等因素的影响,点云数据中往往存在着一些离主体点云较远的离散点,即离群点。不同的获取设备点云噪声结构也有不同。
通过滤波完成的功能还包括孔洞修复、最小信息损失的海量点云数据压缩处理等 。在点云处理流程中滤波处理作为预处理的第一步,往往对后续处理流程影响很大,只有在滤波预处理中将噪声点、离群点、孔洞、数据压缩等 按照后续需求处理,才能够更好地进行配准、特征提取、曲面重建、可视化等后续流程。
PCL 中点云滤波模块提供了很多灵活实用的滤波处理算法,例如双边滤波、高斯滤波、条件滤波、直通滤波、基于随机采样一致性滤波RANSAC等。滤波模块是作为 PCL的一个重要处理模块,其在应用中可以非常方便与其他点云处理流程协同使用。
应用场景
1、点云数据密度不规则需要平滑处理
2、去除因为遮挡等问题造成离群点
3、数据量较大,需要进行下采样( Downsample)
4、去除噪声数据。
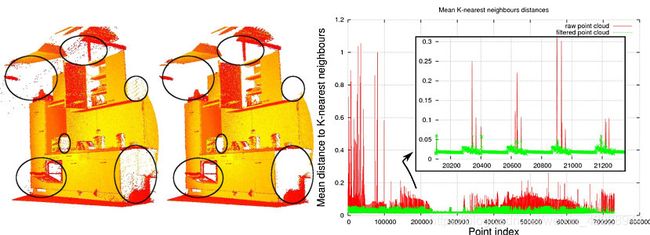
下图显示了一个噪声消除的示例。 由于测量误差,某些数据集会出现大量阴影点。 这使局部点云3D特征的估算变得复杂。我们通过对每个点的邻域进行统计分析,并修剪掉不符合特定条件的那些异常值,进而可以过滤掉某些异常值。
PCL中的实现这些稀疏离群值的消除,需要计算数据集中的点与邻居距离的分布。 即对于每个点,都会计算从它到所有相邻点的平均距离。 通过假设结果分布是具有均值和标准差的高斯分布,可以将那些平均距离在【由全局距离均值和标准差定义的区间】之外的所有点视为离群值,并将之从数据集中进行修剪。
直通滤波PassThrough
#include 输出过滤后的结果
Cloud after filtering:
-2 -2 -2
-2 -2 -1.5
-2 -2 -1
-2 -2 -0.5
-2 -2 0.5
-2 -2 1
-2 -2 1.5
-2 -2 2
-2 -1.5 -2
-2 -1.5 -1.5
-2 -1.5 -1
-2 -1.5 -0.5
-2 -1.5 0.5
-2 -1.5 1
-2 -1.5 1.5
-2 -1.5 2
-2 -1 -2
-2 -1 -1.5
-2 -1 -1
-2 -1 -0.5
-2 -1 0.5
-2 -1 1
-2 -1 1.5
-2 -1 2
-2 -0.5 -2
-2 -0.5 -1.5
-2 -0.5 -1
-2 -0.5 -0.5
-2 -0.5 0.5
-2 -0.5 1
-2 -0.5 1.5
-2 -0.5 2
-2 0.5 -2
-2 0.5 -1.5
-2 0.5 -1
-2 0.5 -0.5
-2 0.5 0.5
-2 0.5 1
-2 0.5 1.5
-2 0.5 2
-2 1 -2
-2 1 -1.5
-2 1 -1
-2 1 -0.5
-2 1 0.5
-2 1 1
-2 1 1.5
-2 1 2
-2 1.5 -2
-2 1.5 -1.5
-2 1.5 -1
-2 1.5 -0.5
-2 1.5 0.5
-2 1.5 1
-2 1.5 1.5
-2 1.5 2
-2 2 -2
-2 2 -1.5
-2 2 -1
-2 2 -0.5
-2 2 0.5
-2 2 1
-2 2 1.5
-2 2 2
-1.5 -2 -2
-1.5 -2 -1.5
-1.5 -2 -1
-1.5 -2 -0.5
-1.5 -2 0.5
-1.5 -2 1
-1.5 -2 1.5
-1.5 -2 2
-1.5 -1.5 -2
-1.5 -1.5 -1.5
-1.5 -1.5 -1
-1.5 -1.5 -0.5
-1.5 -1.5 0.5
-1.5 -1.5 1
-1.5 -1.5 1.5
-1.5 -1.5 2
-1.5 -1 -2
-1.5 -1 -1.5
-1.5 -1 -1
-1.5 -1 -0.5
-1.5 -1 0.5
-1.5 -1 1
-1.5 -1 1.5
-1.5 -1 2
-1.5 -0.5 -2
-1.5 -0.5 -1.5
-1.5 -0.5 -1
-1.5 -0.5 -0.5
-1.5 -0.5 0.5
-1.5 -0.5 1
-1.5 -0.5 1.5
-1.5 -0.5 2
-1.5 0.5 -2
-1.5 0.5 -1.5
-1.5 0.5 -1
-1.5 0.5 -0.5
-1.5 0.5 0.5
-1.5 0.5 1
-1.5 0.5 1.5
-1.5 0.5 2
-1.5 1 -2
-1.5 1 -1.5
-1.5 1 -1
-1.5 1 -0.5
-1.5 1 0.5
-1.5 1 1
-1.5 1 1.5
-1.5 1 2
-1.5 1.5 -2
-1.5 1.5 -1.5
-1.5 1.5 -1
-1.5 1.5 -0.5
-1.5 1.5 0.5
-1.5 1.5 1
-1.5 1.5 1.5
-1.5 1.5 2
-1.5 2 -2
-1.5 2 -1.5
-1.5 2 -1
-1.5 2 -0.5
-1.5 2 0.5
-1.5 2 1
-1.5 2 1.5
-1.5 2 2
-1 -2 -2
-1 -2 -1.5
-1 -2 -1
-1 -2 -0.5
-1 -2 0.5
-1 -2 1
-1 -2 1.5
-1 -2 2
-1 -1.5 -2
-1 -1.5 -1.5
-1 -1.5 -1
-1 -1.5 -0.5
-1 -1.5 0.5
-1 -1.5 1
-1 -1.5 1.5
-1 -1.5 2
-1 -1 -2
-1 -1 -1.5
-1 -1 -1
-1 -1 -0.5
-1 -1 0.5
-1 -1 1
-1 -1 1.5
-1 -1 2
-1 -0.5 -2
-1 -0.5 -1.5
-1 -0.5 -1
-1 -0.5 -0.5
-1 -0.5 0.5
-1 -0.5 1
-1 -0.5 1.5
-1 -0.5 2
-1 0.5 -2
-1 0.5 -1.5
-1 0.5 -1
-1 0.5 -0.5
-1 0.5 0.5
-1 0.5 1
-1 0.5 1.5
-1 0.5 2
-1 1 -2
-1 1 -1.5
-1 1 -1
-1 1 -0.5
-1 1 0.5
-1 1 1
-1 1 1.5
-1 1 2
-1 1.5 -2
-1 1.5 -1.5
-1 1.5 -1
-1 1.5 -0.5
-1 1.5 0.5
-1 1.5 1
-1 1.5 1.5
-1 1.5 2
-1 2 -2
-1 2 -1.5
-1 2 -1
-1 2 -0.5
-1 2 0.5
-1 2 1
-1 2 1.5
-1 2 2
-0.5 -2 -2
-0.5 -2 -1.5
-0.5 -2 -1
-0.5 -2 -0.5
-0.5 -2 0.5
-0.5 -2 1
-0.5 -2 1.5
-0.5 -2 2
-0.5 -1.5 -2
-0.5 -1.5 -1.5
-0.5 -1.5 -1
-0.5 -1.5 -0.5
-0.5 -1.5 0.5
-0.5 -1.5 1
-0.5 -1.5 1.5
-0.5 -1.5 2
-0.5 -1 -2
-0.5 -1 -1.5
-0.5 -1 -1
-0.5 -1 -0.5
-0.5 -1 0.5
-0.5 -1 1
-0.5 -1 1.5
-0.5 -1 2
-0.5 -0.5 -2
-0.5 -0.5 -1.5
-0.5 -0.5 -1
-0.5 -0.5 -0.5
-0.5 -0.5 0.5
-0.5 -0.5 1
-0.5 -0.5 1.5
-0.5 -0.5 2
-0.5 0.5 -2
-0.5 0.5 -1.5
-0.5 0.5 -1
-0.5 0.5 -0.5
-0.5 0.5 0.5
-0.5 0.5 1
-0.5 0.5 1.5
-0.5 0.5 2
-0.5 1 -2
-0.5 1 -1.5
-0.5 1 -1
-0.5 1 -0.5
-0.5 1 0.5
-0.5 1 1
-0.5 1 1.5
-0.5 1 2
-0.5 1.5 -2
-0.5 1.5 -1.5
-0.5 1.5 -1
-0.5 1.5 -0.5
-0.5 1.5 0.5
-0.5 1.5 1
-0.5 1.5 1.5
-0.5 1.5 2
-0.5 2 -2
-0.5 2 -1.5
-0.5 2 -1
-0.5 2 -0.5
-0.5 2 0.5
-0.5 2 1
-0.5 2 1.5
-0.5 2 2
滤波前

滤波后
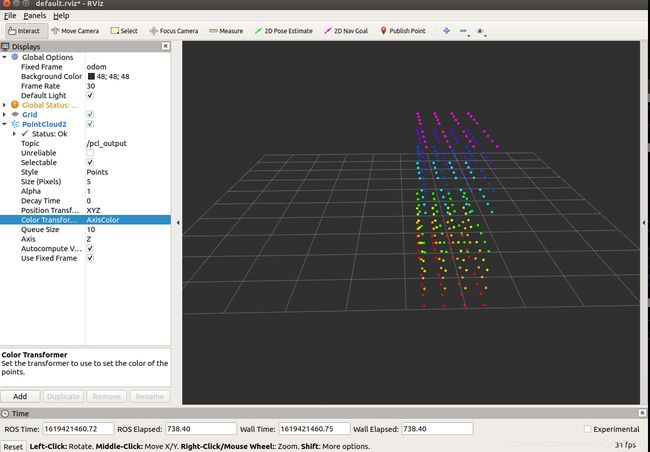
可见x方向上,-2~0 该区间内的点都被过滤掉了
- 如果使用了pass.setFilterLimitsNegative (true);,则以上结果取反。