半监督3D医学图像分割(三):URPC
Efficient Semi-supervised Gross Target Volume of Nasopharyngeal Carcinoma Segmentation via Uncertainty Rectified Pyramid Consistency
深度学习归根结底是数据驱动的,模型训练的好坏依赖于数据集。在医学图像分割领域,即使是像nn-UNet那样强大的训练框架,也受限于数据集的大小。相比自然图像,医学图像的标注代价更加昂贵,相反,无标注的图像有很多。半监督学习的目的就是将无标注的数据利用起来,达到比单独用有标注数据集更好的效果。
前两篇博客介绍的方法,都是student-teacher双路模型,URPC是单路模型。TS模型是在学生网络和教师网络之间做一致性损失,URPC则是多级特征内部做一致性损失,相比TS架构的计算量和显存大大降低。
网络结构

- 以U-Net为基础(Backbone),E是编码器(Encoder),D是解码器(Decoder)
- p0,p1,p2,ps是解码器不同层的预测结果,通过上采样统一尺寸
- 绿色和红色箭头分别代表分割损失(有标注)和一致性损失(无标注)
论文在U-Net的解码器增加了一个金字塔预测结构,叫做PPNet。PPNet输出多尺度的预测结果,和标签计算分割损失,与Rectified后的特征做一致性损失。同时引入了深监督,一致性损失,不确定性抑制的概念。
[ p 0 ′ , p 1 ′ , p 2 ′ , p s ′ ] = [ f ( x ∣ D 0 ) , f ( x ∣ D 1 ) , f ( x ∣ D 2 ) , f ( x ∣ D 3 ) ] [p_0',p_1',p_2',p_s']=[f(x|D_0),f(x|D_1),f(x|D_2),f(x|D_3)] [p0′,p1′,p2′,ps′]=[f(x∣D0),f(x∣D1),f(x∣D2),f(x∣D3)]
- p’是解码器不同层的输出,不同特征的分辨率和通道数是不一样的
[ p 0 , p 1 , p 2 , p s ] = [ g ( p 0 ′ ) , g ( p 1 ′ ) , g ( p 2 ′ ) , g ( p s ′ ) ] [p_0,p_1,p_2,p_s]=[g(p_0'),g(p_1'),g(p_2'),g(p_s')] [p0,p1,p2,ps]=[g(p0′),g(p1′),g(p2′),g(ps′)]
- g由上采样模块、 1x1x1的卷积层和softmax层组成
- p是概率图(C x H x W x D),此时分辨率和通道数都是一样的
损失函数
1.分割损失
医学图像分割任务中常用的交叉熵和dice损失,s个预测结果分别与标签计算损失,然后取平均
L s u p = 1 S ∑ s = 0 S − 1 L d i c e ( p s , y i ) + L c e ( p s , y i ) 2 L_{sup}=\frac{1}{S}\sum_{s=0}^{S-1}{\frac{L_{dice}(p_s,y_i)+L_{ce}(p_s,y_i)}{2}} Lsup=S1s=0∑S−12Ldice(ps,yi)+Lce(ps,yi)
2.无监督损失
为了有效利用无标注数据,URPC利用多尺度特征计算一致性损失,从而引入了正则化。具体而言,设计了金字塔一致性损失最小化不同尺度预测之间的差异。首先,对这些预测结果求平均:
p c = 1 S ∑ s = 0 S − 1 p s p_c=\frac{1}{S}\sum_{s=0}^{S-1}{p_s} pc=S1s=0∑S−1ps
金字塔一致性损失定义为:
L p y c = 1 S ∑ s = 0 S − 1 ∣ ∣ p s − p c ∣ ∣ 2 L_{pyc}=\frac{1}{S}\sum_{s=0}^{S-1}||p_s-p_c||_2 Lpyc=S1s=0∑S−1∣∣ps−pc∣∣2
ps是不同尺度的预测结果,pc是均值,ps与pc计算MSE
3.不确定性修正
计算不确定度
不同尺度的特征分辨率不同,如果输入的原图是 H x W x D,上采样四次,则p0~p3的分辨率为 H x W x D,H/2 x W/2 x D/2,H/4 x W/4 x D/4,H/8 x W/8 x D/8。在U-Net网络中,分辨率越低的特征图,通道数越多,语义特征越高级,捕获的低频信息越多。反之,分辨率越高的特征,包含的高频信息越多。由于不同特征的频率信息不同,直接上采样后计算一致性可能存在问题,比如细节信息的丢失。
与上一篇博客提到的UA-MT不同,URPC只需要一次前向传播,能够高效的计算不确定度,用的是KL散度计算预测结果和平均预测结果之间的差异。
D s ≈ ∑ j = 0 C p s j ⋅ l o g p s j p c j D_s\approx\sum_{j=0}^{C}{p_s^j \cdot log\frac{p_s^j}{p_c^j}} Ds≈j=0∑Cpsj⋅logpcjpsj
- C是分割类别,psj是ps的第j个通道,pcj是pc的第j个通道
- Ds是ps和pc之间的KL散度,用来表示不确定度,形状是 C x H x W x D
- pc可以认为是多尺度预测结果的中心,Ds越大代表离中心越远,不确定性越高
不确定性修正
根据不确定度对上文提到的金字塔一致性损失做了修正,
ω s v = e − D s v \omega_s^v=e^{-D_s^v} ωsv=e−Dsv

- psv和pcv分别表示ps和pc在体素v处的概率向量
- 上式第一项是修正后的金字塔一致性损失,第二项有点像正则化,用来降低不确定性
- wsv和Dsv是当前体素的权重和不确定度,根据公式,不确定度越高的区域,分配的权重越低
4.损失函数
URPC在有标注图像上的分割损失和无标注图像上的一致性损失,用一个公式表示
L t o t a l = L s u p + λ ⋅ L u n s u p L_{total}=L_{sup}+\lambda\cdot L_{unsup} Ltotal=Lsup+λ⋅Lunsup
λ ( t ) = ω m a x ⋅ e − 5 ( 1 − t t m a x ) 2 \lambda(t) = \omega_{max} \cdot e^{-5(1-\frac{t}{t_{max}})^2} λ(t)=ωmax⋅e−5(1−tmaxt)2
- Lsup和Lunsup对应有监督损失和无监督损失
- λ是无监督损失的权重,在训练过程中逐渐增加,防止网络训练前期被无意义的目标影响
代码解读

网络就是深监督的U-Net,另外添加4个Dropout层增加了多尺度特征的随机性
class unet_3D_dv_semi(nn.Module):
def __init__(self, feature_scale=4, n_classes=21, is_deconv=True, in_channels=3, is_batchnorm=True):
super(unet_3D_dv_semi, self).__init__()
self.is_deconv = is_deconv
self.in_channels = in_channels
self.is_batchnorm = is_batchnorm
self.feature_scale = feature_scale
filters = [64, 128, 256, 512, 1024]
filters = [int(x / self.feature_scale) for x in filters]
# downsampling
self.conv1 = UnetConv3(self.in_channels, filters[0], self.is_batchnorm, kernel_size=(3, 3, 3), padding_size=(1, 1, 1))
self.maxpool1 = nn.MaxPool3d(kernel_size=(2, 2, 2))
self.conv2 = UnetConv3(filters[0], filters[1], self.is_batchnorm, kernel_size=(3, 3, 3), padding_size=(1, 1, 1))
self.maxpool2 = nn.MaxPool3d(kernel_size=(2, 2, 2))
self.conv3 = UnetConv3(filters[1], filters[2], self.is_batchnorm, kernel_size=(3, 3, 3), padding_size=(1, 1, 1))
self.maxpool3 = nn.MaxPool3d(kernel_size=(2, 2, 2))
self.conv4 = UnetConv3(filters[2], filters[3], self.is_batchnorm, kernel_size=(3, 3, 3), padding_size=(1, 1, 1))
self.maxpool4 = nn.MaxPool3d(kernel_size=(2, 2, 2))
self.center = UnetConv3(filters[3], filters[4], self.is_batchnorm, kernel_size=(3, 3, 3), padding_size=(1, 1, 1))
# upsampling
self.up_concat4 = UnetUp3_CT(filters[4], filters[3], is_batchnorm)
self.up_concat3 = UnetUp3_CT(filters[3], filters[2], is_batchnorm)
self.up_concat2 = UnetUp3_CT(filters[2], filters[1], is_batchnorm)
self.up_concat1 = UnetUp3_CT(filters[1], filters[0], is_batchnorm)
# deep supervision
self.dsv4 = UnetDsv3(in_size=filters[3], out_size=n_classes, scale_factor=8)
self.dsv3 = UnetDsv3(in_size=filters[2], out_size=n_classes, scale_factor=4)
self.dsv2 = UnetDsv3(in_size=filters[1], out_size=n_classes, scale_factor=2)
self.dsv1 = nn.Conv3d(in_channels=filters[0], out_channels=n_classes, kernel_size=1)
self.dropout1 = nn.Dropout3d(p=0.5)
self.dropout2 = nn.Dropout3d(p=0.3)
self.dropout3 = nn.Dropout3d(p=0.2)
self.dropout4 = nn.Dropout3d(p=0.1)
def forward(self, inputs):
conv1 = self.conv1(inputs)
maxpool1 = self.maxpool1(conv1)
conv2 = self.conv2(maxpool1)
maxpool2 = self.maxpool2(conv2)
conv3 = self.conv3(maxpool2)
maxpool3 = self.maxpool3(conv3)
conv4 = self.conv4(maxpool3)
maxpool4 = self.maxpool4(conv4)
center = self.center(maxpool4)
up4 = self.up_concat4(conv4, center)
up4 = self.dropout1(up4)
up3 = self.up_concat3(conv3, up4)
up3 = self.dropout2(up3)
up2 = self.up_concat2(conv2, up3)
up2 = self.dropout3(up2)
up1 = self.up_concat1(conv1, up2)
up1 = self.dropout4(up1)
# Deep Supervision
dsv4 = self.dsv4(up4)
dsv3 = self.dsv3(up3)
dsv2 = self.dsv2(up2)
dsv1 = self.dsv1(up1)
return dsv1, dsv2, dsv3, dsv4
d s v 1 , d s v 2 , d s v 3 , d s v 4 对应网络图中的 p 0 , p 1 , p 2 , p 3 dsv1, dsv2, dsv3, dsv4对应网络图中的p_0, p_1,p_2,p_3 dsv1,dsv2,dsv3,dsv4对应网络图中的p0,p1,p2,p3
for epoch_num in tqdm(range(max_epoch), ncols=70):
for i_batch, sampled_batch in enumerate(trainloader):
volume_batch, label_batch = sampled_batch['image'], sampled_batch['label']
volume_batch, label_batch = volume_batch.cuda(), label_batch.cuda()
unlabeled_volume_batch = volume_batch[labeled_bs:]
outputs_aux1, outputs_aux2, outputs_aux3, outputs_aux4, = model(volume_batch)
outputs_aux1_soft = torch.softmax(outputs_aux1, dim=1)
outputs_aux2_soft = torch.softmax(outputs_aux2, dim=1)
outputs_aux3_soft = torch.softmax(outputs_aux3, dim=1)
outputs_aux4_soft = torch.softmax(outputs_aux4, dim=1)
- outputs_aux1, outputs_aux2, outputs_aux3, outputs_aux4是多尺度的预测结果
loss_ce_aux1 = ce_loss(outputs_aux1[:args.labeled_bs], label_batch[:args.labeled_bs])
loss_ce_aux2 = ce_loss(outputs_aux2[:args.labeled_bs], label_batch[:args.labeled_bs])
loss_ce_aux3 = ce_loss(outputs_aux3[:args.labeled_bs], label_batch[:args.labeled_bs])
loss_ce_aux4 = ce_loss(outputs_aux4[:args.labeled_bs], label_batch[:args.labeled_bs])
loss_dice_aux1 = dice_loss(outputs_aux1_soft[:args.labeled_bs], label_batch[:args.labeled_bs].unsqueeze(1))
loss_dice_aux2 = dice_loss(outputs_aux2_soft[:args.labeled_bs], label_batch[:args.labeled_bs].unsqueeze(1))
loss_dice_aux3 = dice_loss(outputs_aux3_soft[:args.labeled_bs], label_batch[:args.labeled_bs].unsqueeze(1))
loss_dice_aux4 = dice_loss(outputs_aux4_soft[:args.labeled_bs], label_batch[:args.labeled_bs].unsqueeze(1))
supervised_loss = (loss_ce_aux1+loss_ce_aux2+loss_ce_aux3+loss_ce_aux4 +
loss_dice_aux1+loss_dice_aux2+loss_dice_aux3+loss_dice_aux4)/8
- 对有标注的图像计算分割损失,即常用的交叉熵和dice损失
preds = (outputs_aux1_soft + outputs_aux2_soft+outputs_aux3_soft+outputs_aux4_soft)/4
variance_aux1 = torch.sum(kl_distance(torch.log(outputs_aux1_soft[args.labeled_bs:]), preds[args.labeled_bs:]), dim=1, keepdim=True)
exp_variance_aux1 = torch.exp(-variance_aux1)
variance_aux2 = torch.sum(kl_distance(torch.log(outputs_aux2_soft[args.labeled_bs:]), preds[args.labeled_bs:]), dim=1, keepdim=True)
exp_variance_aux2 = torch.exp(-variance_aux2)
variance_aux3 = torch.sum(kl_distance(torch.log(outputs_aux3_soft[args.labeled_bs:]), preds[args.labeled_bs:]), dim=1, keepdim=True)
exp_variance_aux3 = torch.exp(-variance_aux3)
variance_aux4 = torch.sum(kl_distance(torch.log(outputs_aux4_soft[args.labeled_bs:]), preds[args.labeled_bs:]), dim=1, keepdim=True)
exp_variance_aux4 = torch.exp(-variance_aux4)
consistency_dist_aux1 = (preds[args.labeled_bs:] - outputs_aux1_soft[args.labeled_bs:]) ** 2
consistency_loss_aux1 = torch.mean(consistency_dist_aux1 * exp_variance_aux1) / (torch.mean(exp_variance_aux1) + 1e-8) + torch.mean(variance_aux1)
consistency_dist_aux2 = (preds[args.labeled_bs:] - outputs_aux2_soft[args.labeled_bs:]) ** 2
consistency_loss_aux2 = torch.mean(consistency_dist_aux2 * exp_variance_aux2) / (torch.mean(exp_variance_aux2) + 1e-8) + torch.mean(variance_aux2)
consistency_dist_aux3 = (preds[args.labeled_bs:] - outputs_aux3_soft[args.labeled_bs:]) ** 2
consistency_loss_aux3 = torch.mean(consistency_dist_aux3 * exp_variance_aux3) / (torch.mean(exp_variance_aux3) + 1e-8) + torch.mean(variance_aux3)
consistency_dist_aux4 = (preds[args.labeled_bs:] - outputs_aux4_soft[args.labeled_bs:]) ** 2
consistency_loss_aux4 = torch.mean(consistency_dist_aux4 * exp_variance_aux4) / (torch.mean(exp_variance_aux4) + 1e-8) + torch.mean(variance_aux4)
consistency_loss = (consistency_loss_aux1 + consistency_loss_aux2 + consistency_loss_aux3 + consistency_loss_aux4) / 4
- preds对应pc
p c = 1 S ∑ s = 0 S − 1 p s p_c=\frac{1}{S}\sum_{s=0}^{S-1}{p_s} pc=S1s=0∑S−1ps
- variance_aux对应Ds
D s ≈ ∑ j = 0 C p s j ⋅ l o g p s j p c j D_s\approx\sum_{j=0}^{C}{p_s^j \cdot log\frac{p_s^j}{p_c^j}} Ds≈j=0∑Cpsj⋅logpcjpsj
- exp_variance_aux对应wsv
ω s v = e − D s v \omega_s^v=e^{-D_s^v} ωsv=e−Dsv
- consistency_loss对应无监督损失

consistency_weight = get_current_consistency_weight(iter_num//150)
loss = supervised_loss + consistency_weight * consistency_loss
- consistency_weight对应λ,w_max=0.1,随iteration逐渐增加到0.1
λ ( t ) = ω m a x ⋅ e − 5 ( 1 − t t m a x ) 2 \lambda(t) = \omega_{max} \cdot e^{-5(1-\frac{t}{t_{max}})^2} λ(t)=ωmax⋅e−5(1−tmaxt)2
其余代码细节见LASeg: 2018 Left Atrium Segmentation (MRI)中的train_URPC.py
实验结果
论文实验
原论文是在鼻咽癌核磁数据集上做的实验
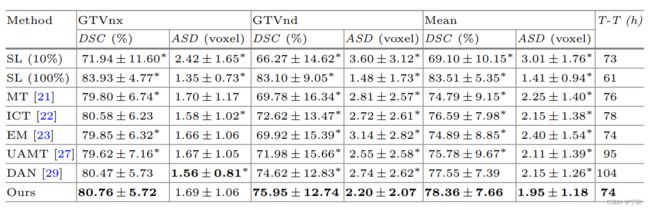
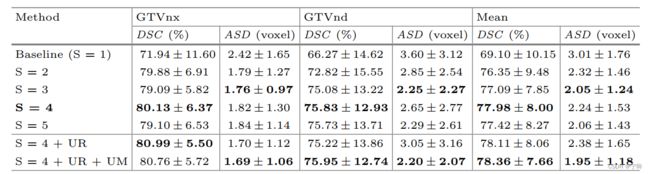
- S是多尺度特征的数量,GTVnx和GTVnd是分割的不同区域,DSC是dice系数,ASD是平均表面距离
- S=4时,分割精度最高。S=3时效果也不错,看的出来,继续增加S提升不大,反而会增加网络参数和计算量
- UR(uncertainty rectification)是不确定性修正,UM(uncertainty minimization)是不确定度抑制
- 同样是10%的标签率,SL是监督学习
- 所有的半监督网络都以3D U-Net为backbone,URPC的表现是最好的

- 图a中,不确定的区域主要集中在分割目标的边界区域
- 图b中,随着标签率从10%提高到50%,URPC的dice指标一直是比DAN高的
我的实验
我在左心房数据集(LAHeart2018)上做的实验,一共154例数据,123例当做训练集,31例当做测试集。
Loss变化曲线


- 我这里的对比并不严谨,mean teacher网络里面的backbone是V-Net,URPC的backbone是U-Net
- 根据我自己做的实验,URPC效果在左心房核磁数据集上的表现,比MT没有多大提高
分割结果重建图:红色是金标签,蓝色是模型预测结果
- 相比只使用标注数据集的全监督方法,半监督方法不管是在评价指标或者可视化分割结果上,都是有显著提高的。
URPC的优点在于不修改网络结构,把U-Net网络中的多级特征利用起来,相互之间做一致性损失,并引入不确定度修正预测结果。
相比student-teacher网络,训练起来更加简单。
参考资料:
Luo X, Liao W, Chen J, et al. Efficient semi-supervised gross target volume of nasopharyngeal carcinoma segmentation via uncertainty rectified pyramid consistency[C]//International Conference on Medical Image Computing and Computer-Assisted Intervention. Springer, Cham, 2021: 318-329.
HiLab-git/SSL4MIS: Semi Supervised Learning for Medical Image Segmentation, a collection of literature reviews and code implementations.
项目地址:
LASeg: 2018 Left Atrium Segmentation (MRI)
如有问题,欢迎联系 ‘[email protected]’