利用PCL库从点云数据生成深度图像及关键点提取
利用PCL库从点云数据生成生成深度图像及关键点提取
利用PCL库从点云数据生成深度图像及关键点提取
本想利用标准点云数据库分割成若干块,利用标准点云数据生成深度图像作为数据库用来验证算法,目前效果不是很好。不过作为一种特征点提取方法还是有参考价值。
1.点云–深度图像
可视化深度图像:
- 在3D viewer中以点云的方式显示。
- 另一种方式是作为一幅图像显示(以不同的颜色表示不同的深度值)
定义:
- 深度图像的每个像素点的灰度值可用于表征场景中某一点距离摄像机的远近。 直接反应了景物可见表面的几何形状。
- 深度图像经过坐标转换可以计算为点云数据,点云数据也可以转换为深度图像。
2.PCL相关函数
- 所在头文件:#include
- PCL类:RangeImage是一个工具类,用于在特定视角捕捉的3D场景。
- 函数:
template <typename PointCloudType> void
RangeImage::createFromPointCloud (const PointCloudType& point_cloud, float angular_resolution,
float max_angle_width, float max_angle_height,
const Eigen::Affine3f& sensor_pose, RangeImage::CoordinateFrame coordinate_frame,
float noise_level, float min_range, int border_size)
{
createFromPointCloud (point_cloud, angular_resolution, angular_resolution, max_angle_width, max_angle_height,
sensor_pose, coordinate_frame, noise_level, min_range, border_size);
}
| 参数 | 描述 |
|---|---|
| point_cloud | 输入的点云数据 |
| angular_resolution | 图像中各个像素之间的角差(弧度)。 角差是一次信号与二次信号的相位之差。 |
| max_angle_width | 定义传感器水平边界的角度(弧度)。 |
| max_angle_height | 定义传感器垂直边界的角度(弧度)。 |
| sensor_pose | 传感器姿态的变换矩阵 |
| coordinate_frame | 坐标系统 (默认为相机坐标系 CAMERA_FRAME) |
| noise_level | 近邻点对查询点距离的影响水平 |
| min_range | 最小可视深度 (defaults to 0) |
| border_size | 点云边界的尺寸大小 (defaults to 0) |
3.例程(导入自己PCD文件有问题,下个例程讲到)
/*
NARF
从深度图像(RangeImage)中提取NARF关键点
1. 边缘提取
对点云而言,场景的边缘代表前景物体和背景物体的分界线。
所以,点云的边缘又分为三种:
前景边缘,背景边缘,阴影边缘。
就是点a 和点b 如果在 rangImage 上是相邻的,然而在三维距离上却很远,那么多半这里就有边缘。
在提取关键点时,
边缘应该作为一个重要的参考依据。
但一定不是唯一的依据。
对于某个物体来说关键点应该是表达了某些特征的点,而不仅仅是边缘点。
所以在设计关键点提取算法时,需要考虑到以下一些因素:
边缘和曲面结构都要考虑进去;
关键点要能重复;
关键点最好落在比较稳定的区域,方便提取法线。
图像的Harris角点算子将图像的关键点定义为角点。
角点也就是物体边缘的交点,
harris算子利用角点在两个方向的灰度协方差矩阵响应都很大,来定义角点。
既然关键点在二维图像中已经被成功定义且使用了,
看来在三维点云中可以沿用二维图像的定义
不过今天要讲的是另外一种思路,简单粗暴,
直接把三维的点云投射成二维的图像不就好了。
这种投射方法叫做range_image.
*/
#include \n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-r 角度 angular resolution in degrees (default " <<angular_resolution<<")\n"
<< "-c 坐标系 coordinate frame (default " << (int)coordinate_frame<<")\n"
<< "-m Treat all unseen points as maximum range readings\n"
<< "-s support size for the interest points (diameter of the used sphere - "
<< "default "<<support_size<<")\n"
<< "-h this help\n"
<< "\n\n";
}
//void
//setViewerPose (pcl::visualization::PCLVisualizer& viewer, const Eigen::Affine3f& viewer_pose)
//{
//Eigen::Vector3f pos_vector = viewer_pose * Eigen::Vector3f (0, 0, 0);
//Eigen::Vector3f look_at_vector = viewer_pose.rotation () * Eigen::Vector3f (0, 0, 1) + pos_vector;
//Eigen::Vector3f up_vector = viewer_pose.rotation () * Eigen::Vector3f (0, -1, 0);
//viewer.setCameraPosition (pos_vector[0], pos_vector[1], pos_vector[2],
//look_at_vector[0], look_at_vector[1], look_at_vector[2],
//up_vector[0], up_vector[1], up_vector[2]);
//}
// --------------
// -----Main-----
// --------------
int
main (int argc, char** argv)
{
// --------------------------------------
// ----- 解析 命令行 参数 Parse Command Line Arguments-----
// --------------------------------------
if (pcl::console::find_argument (argc, argv, "-h") >= 0)//help参数
{
printUsage (argv[0]);//程序名
return 0;
}
if (pcl::console::find_argument (argc, argv, "-m") >= 0)
{
setUnseenToMaxRange = true;//将所有不可见的点 看作 最大距离
cout << "Setting unseen values in range image to maximum range readings.\n";
}
int tmp_coordinate_frame;//坐标框架:相机框架(而不是激光框架)
if (pcl::console::parse (argc, argv, "-c", tmp_coordinate_frame) >= 0)
{
coordinate_frame = pcl::RangeImage::CoordinateFrame (tmp_coordinate_frame);
cout << "Using coordinate frame "<< (int)coordinate_frame<<".\n";
}
// 感兴趣点的尺寸(球面的直径)
if (pcl::console::parse (argc, argv, "-s", support_size) >= 0)
cout << "Setting support size to "<<support_size<<".\n";
// 角坐标分辨率
if (pcl::console::parse (argc, argv, "-r", angular_resolution) >= 0)
cout << "Setting angular resolution to "<<angular_resolution<<"deg.\n";
angular_resolution = pcl::deg2rad (angular_resolution);
// ------------------------------------------------------------------
// -----Read pcd file or create example point cloud if not given-----
// ------------------------------------------------------------------
//读取pcd文件;如果没有指定文件,就创建样本点
pcl::PointCloud<PointType>::Ptr point_cloud_ptr(new pcl::PointCloud<PointType>);//点云对象指针
pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr;//引用 上面点云的别名 常亮指针
pcl::PointCloud<pcl::PointWithViewpoint> far_ranges;//带视角的点云
Eigen::Affine3f scene_sensor_pose (Eigen::Affine3f::Identity ());//仿射变换
//检查参数中是否有pcd格式文件名,返回参数向量中的索引号
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument (argc, argv, "pcd");
if (!pcd_filename_indices.empty())
{
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile (filename, point_cloud) == -1)//如果指定了pcd文件,读取pcd文件
{
std::cerr << "Was not able to open file \""<<filename<<"\".\n";
printUsage (argv[0]);
return 0;
}
//设置传感器的姿势
scene_sensor_pose = Eigen::Affine3f (Eigen::Translation3f (point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f (point_cloud.sensor_orientation_);
//读取远距离文件?
std::string far_ranges_filename = pcl::getFilenameWithoutExtension (filename)+"_far_ranges.pcd";
if (pcl::io::loadPCDFile (far_ranges_filename.c_str (), far_ranges) == -1)
std::cout << "Far ranges file \""<<far_ranges_filename<<"\" does not exists.\n";
}
else//没有指定pcd文件,生成点云,并填充它
{
setUnseenToMaxRange = true;//将所有不可见的点 看作 最大距离
cout << "\nNo *.pcd file given => Genarating example point cloud.\n\n";
for (float x=-0.5f; x<=0.5f; x+=0.01f)
{
for (float y=-0.5f; y<=0.5f; y+=0.01f)
{
PointType point; point.x = x; point.y = y; point.z = 2.0f - y;
point_cloud.points.push_back (point);//设置点云中点的坐标
}
}
point_cloud.width = (int) point_cloud.points.size ();
point_cloud.height = 1;
}
// -----------------------------------------------
// -----Create RangeImage from the PointCloud-----
// -----------------------------------------------
// 从点云数据,创建深度图像
// 直接把三维的点云投射成二维的图像
float noise_level = 0.0;
//noise level表示的是容差率,因为1°X1°的空间内很可能不止一个点,
//noise level = 0则表示去最近点的距离作为像素值,如果=0.05则表示在最近点及其后5cm范围内求个平均距离
//minRange表示深度最小值,如果=0则表示取1°X1°的空间内最远点,近的都忽略
float min_range = 0.0f;
//bordersieze表示图像周边点
int border_size = 1;
boost::shared_ptr<pcl::RangeImage> range_image_ptr (new pcl::RangeImage);//创建RangeImage对象(智能指针)
pcl::RangeImage& range_image = *range_image_ptr; //RangeImage的引用
//从点云创建深度图像
//rangeImage也是PCL的基本数据结构
//pcl::RangeImage rangeImage;
// 球坐标系
//角分辨率
//float angularResolution = (float) ( 1.0f * (M_PI/180.0f)); // 1.0 degree in radians 弧度
//phi可以取360°
// float maxAngleWidth = (float) (360.0f * (M_PI/180.0f)); // 360.0 degree in radians
//a取180°
// float maxAngleHeight = (float) (180.0f * (M_PI/180.0f)); // 180.0 degree in radians
//半圆扫一圈就是整个图像了
range_image.createFromPointCloud (point_cloud, angular_resolution, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges (far_ranges);//整合远距离点云
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange ();
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
// 3D点云显示
pcl::visualization::PCLVisualizer viewer ("3D Viewer");
viewer.setBackgroundColor (1, 1, 1);//背景颜色 白色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler (range_image_ptr, 0, 0, 0);
viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image");//添加点云
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "range image");
//viewer.addCoordinateSystem (1.0f, "global");
//PointCloudColorHandlerCustom point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
//viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
viewer.initCameraParameters ();
//setViewerPose (viewer, range_image.getTransformationToWorldSystem ());
// --------------------------
// -----Show range image-----
// --------------------------
//显示深度图像(平面图)
pcl::visualization::RangeImageVisualizer range_image_widget ("Range image");
range_image_widget.showRangeImage (range_image);
// --------------------------------
// -----Extract NARF keypoints-----
// --------------------------------
// 提取NARF关键点
pcl::RangeImageBorderExtractor range_image_border_extractor;//创建深度图像的边界提取器,用于提取NARF关键点
pcl::NarfKeypoint narf_keypoint_detector (&range_image_border_extractor);//创建NARF对象
narf_keypoint_detector.setRangeImage (&range_image);//设置点云对应的深度图
narf_keypoint_detector.getParameters ().support_size = support_size;// 感兴趣点的尺寸(球面的直径)
//narf_keypoint_detector.getParameters ().add_points_on_straight_edges = true;
//narf_keypoint_detector.getParameters ().distance_for_additional_points = 0.5;
pcl::PointCloud<int> keypoint_indices;//用于存储关键点的索引
narf_keypoint_detector.compute (keypoint_indices);//计算NARF关键
std::cout << "Found找到关键点: "<<keypoint_indices.points.size ()<<" key points.\n";
// ----------------------------------------------
// -----Show keypoints in range image widget-----
// ----------------------------------------------
//在range_image_widget中显示关键点
//for (size_t i=0; i
//range_image_widget.markPoint (keypoint_indices.points[i]%range_image.width,
//keypoint_indices.points[i]/range_image.width);
// -------------------------------------
// -----Show keypoints in 3D viewer-----
// -------------------------------------
//在3D图形窗口中显示关键点
pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints_ptr (new pcl::PointCloud<pcl::PointXYZ>);//创建关键点指针
pcl::PointCloud<pcl::PointXYZ>& keypoints = *keypoints_ptr;//引用
keypoints.points.resize (keypoint_indices.points.size ());//初始化大小
for (size_t i=0; i<keypoint_indices.points.size (); ++i)//按照索引获得 关键点
keypoints.points[i].getVector3fMap () = range_image.points[keypoint_indices.points[i]].getVector3fMap ();
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> keypoints_color_handler (keypoints_ptr, 0, 255, 0);
viewer.addPointCloud<pcl::PointXYZ> (keypoints_ptr, keypoints_color_handler, "keypoints");//添加显示关键点
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "keypoints");
//--------------------
// -----Main loop-----
//--------------------
while (!viewer.wasStopped ())
{
range_image_widget.spinOnce (); // process GUI events 处理 GUI事件
viewer.spinOnce ();
pcl_sleep(0.01);
}
}
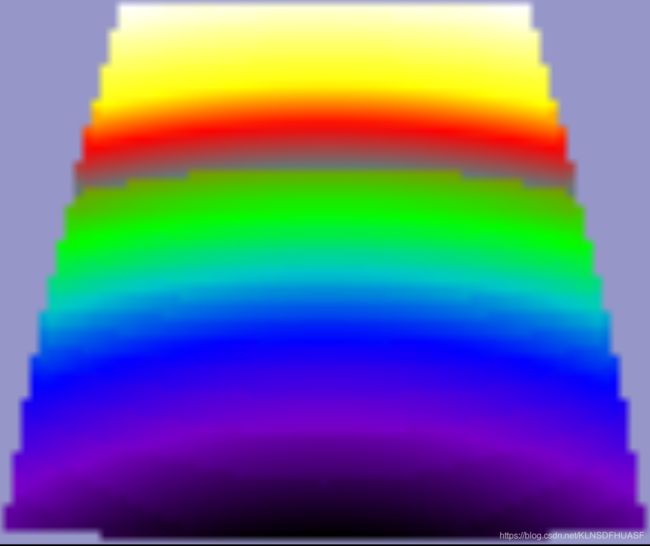
深度图 结果:
三维信息及关键点:

上述是利用例程中创建的样本点,如如若导入我们自己的PCD点云文件,则会出错

原因是例程中使用了参考远距离文件 "_far_ranges.pcd"
另有: 导入本地PCD文件方法(两种方法,选一种即可)
- 项目-属性-调试-命令参数:写入PCD文件名。

- 在debug文件夹中打开CMD命令框,输入 **.exe nomslpcd.pcd ,注意中间有个空格,同时PCD文件要在同文件夹下。

4.更改后例程(利用最远处距离去除参考距离)
#include \n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-rx angular resolution in degrees (default " << angular_resolution_x << ")\n"
<< "-ry angular resolution in degrees (default " << angular_resolution_y << ")\n"
<< "-c coordinate frame (default " << (int)coordinate_frame << ")\n"
<< "-l live update - update the range image according to the selected view in the 3D viewer.\n"
<< "-h this help\n"
<< "\n\n";
}
/*
void setViewerPose (pcl::visualization::PCLVisualizer& viewer, const Eigen::Affine3f& viewer_pose)
{
Eigen::Vector3f pos_vector = viewer_pose * Eigen::Vector3f(0, 0, 0);
Eigen::Vector3f look_at_vector = viewer_pose.rotation () * Eigen::Vector3f(0, 0, 1) + pos_vector;
Eigen::Vector3f up_vector = viewer_pose.rotation () * Eigen::Vector3f(0, -1, 0);
viewer.setCameraPosition (pos_vector[0], pos_vector[1], pos_vector[2],
look_at_vector[0], look_at_vector[1], look_at_vector[2],
up_vector[0], up_vector[1], up_vector[2]);
}
*/
// 主函数
int main(int argc, char** argv)
{
//解析命令行参数
if (pcl::console::find_argument(argc, argv, "-h") >= 0)
{
printUsage(argv[0]);
return 0;
}
if (pcl::console::find_argument(argc, argv, "-l") >= 0)
{
live_update = true;
std::cout << "Live update is on.\n";
}
if (pcl::console::parse(argc, argv, "-rx", angular_resolution_x) >= 0)
std::cout << "Setting angular resolution in x-direction to " << angular_resolution_x << "deg.\n";
if (pcl::console::parse(argc, argv, "-ry", angular_resolution_y) >= 0)
std::cout << "Setting angular resolution in y-direction to " << angular_resolution_y << "deg.\n";
int tmp_coordinate_frame;
if (pcl::console::parse(argc, argv, "-c", tmp_coordinate_frame) >= 0)
{
coordinate_frame = pcl::RangeImage::CoordinateFrame(tmp_coordinate_frame);
std::cout << "Using coordinate frame " << (int)coordinate_frame << ".\n";
}
angular_resolution_x = pcl::deg2rad(angular_resolution_x);
angular_resolution_y = pcl::deg2rad(angular_resolution_y);
//读取pcd文件。如果没有指定文件,则创建样本云点
pcl::PointCloud<PointType>::Ptr point_cloud_ptr(new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr;
Eigen::Affine3f scene_sensor_pose(Eigen::Affine3f::Identity());
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument(argc, argv, "pcd");
if (!pcd_filename_indices.empty())
{
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile(filename, point_cloud) == -1)
{
std::cout << "Was not able to open file \"" << filename << "\".\n";
printUsage(argv[0]);
return 0;
}
scene_sensor_pose = Eigen::Affine3f(Eigen::Translation3f(point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f(point_cloud.sensor_orientation_);
}
else
{
std::cout << "\nNo *.pcd file given => Genarating example point cloud.\n\n";
for (float x = -0.5f; x <= 0.5f; x += 0.01f)
{
for (float y = -0.5f; y <= 0.5f; y += 0.01f)
{
PointType point; point.x = x; point.y = y; point.z = 2.0f - y;
point_cloud.points.push_back(point);
}
}
point_cloud.width = (int)point_cloud.points.size(); point_cloud.height = 1;
}
//从点云创建出深度图
// 直接把三维的点云投射成二维的图像
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
boost::shared_ptr<pcl::RangeImage> range_image_ptr(new pcl::RangeImage); //深度图指针
pcl::RangeImage& range_image = *range_image_ptr; //引用
range_image.createFromPointCloud(point_cloud, angular_resolution_x,
pcl::deg2rad(360.0f), pcl::deg2rad(180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size); //从点云创建出深度图
//打开一个3D图形窗口,并添加点云数据
pcl::visualization::PCLVisualizer viewer("3D Viewer");
viewer.setBackgroundColor(1, 1, 1); //背景
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler(range_image_ptr, 0, 0, 0);
viewer.addPointCloud(range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "range image");
//viewer.addCoordinateSystem (1.0f, "global");
//PointCloudColorHandlerCustom point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
//viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
viewer.initCameraParameters();
//setViewerPose(viewer, range_image.getTransformationToWorldSystem ()); //PCL 1.6 出错
//以图像的形式显示深度图像,深度值作为颜色显示
pcl::visualization::RangeImageVisualizer range_image_widget("Range image");
range_image_widget.showRangeImage(range_image);
float* ranges = range_image.getRangesArray();
unsigned char* rgb_image = pcl::visualization::FloatImageUtils::getVisualImage(ranges, range_image.width, range_image.height);
pcl::io::saveRgbPNGFile("saveRangeImageRGB.png", rgb_image, range_image.width, range_image.height); //saveRgbPNGFile
//主循环
while (!viewer.wasStopped())
{
range_image_widget.spinOnce();
viewer.spinOnce();
pcl_sleep(0.01);
//if (live_update) //根据3D显示,实时更新2D图像
//{
// scene_sensor_pose = viewer.getViewerPose(); //获取观测姿势
// range_image.createFromPointCloud(point_cloud, angular_resolution_x,
// pcl::deg2rad(360.0f), pcl::deg2rad(180.0f),
// scene_sensor_pose, pcl::RangeImage::LASER_FRAME, noise_level, min_range, border_size); //重新生成新的深度图
// range_image_widget.showRangeImage(range_image); //重新显示
// unsigned char* rgb_image = pcl::visualization::FloatImageUtils::getVisualImage(ranges, range_image.width, range_image.height);
// pcl::io::saveRgbPNGFile("saveRangeImageRGB.png", rgb_image, range_image.width, range_image.height); //saveRgbPNGFile
//}
}
}
实验结果:


效果不好,估计是视角或者参考点没有调好。
同时除了pcl可以生成深度图( 原理是根据相机姿态的透视投影),根据生成深度图的原理一般就是透视投影或者正交投影,我们也可以利用opengl或者libigl库来实现。