EKF滤波Matlab代码
本段程序模拟的是原文中的一个抛物线的拟合,详情可以看原文链接,这里给出matlab代码
close all;
clear all;
%% 真实轨迹模拟
kx = .01; ky = .05; %阻尼系数
g = 9.8;
t = 15; %仿真时间
Ts = 0.1; %采样周期
len = fix(t/Ts); %仿真步数
dax = 3;day = 3; %系统噪声
X = zeros(len, 4);
X(1,:) = [0, 50, 500, 0]; %状态模拟的初值
%% 建立状态方程
for k= 2:len
x = X(k-1,1); vx = X(k-1,2); y = X(k-1,3); vy = X(k-1,4);
x = x + vx*Ts;
vx = vx + (-kx * vx^2 + dax*randn(1,1))*Ts; %系统噪声服从高斯分布
y = y + vy*Ts;
vy = vy + (ky * vy^2 - g + day * randn(1))*Ts;
X(k,:) = [x, vx, y, vy];
end
%% 构造量测量
dr = 8; dafa = 0.1;
for k = 1:len
r = sqrt(X(k,1)^2 + X(k,3)^2) + dr*randn(1,1); %量测量与状态量的关系式
a = atan(X(k,1)/X(k,3)) * 57.3 + dafa * randn(1,1);
Z(k,:) = [r, a]; %量测矩阵建立
end
%% EKF滤波
Qk = diag([0; dax/10; 0; day/10]) ^2; %预测状态的高斯噪声的协方差矩阵
Rk = diag([dr; dafa])^2; %传感器的测量误差
Pk = 10*eye(4); %状态向量的协方差阵
Pkk_1 = 10*eye(4);
x_hat = [0, 40, 400, 0]'; %预测值
X_est = zeros(len, 4);
x_forecast = zeros(4,1);
z = zeros(4,1);
for k = 1:len
% 1 状态预测
x1 = x_hat(1) + x_hat(2)*Ts;
vx1 = x_hat(2) + (-kx*x_hat(2)^2)*Ts;
y1 = x_hat(3) + x_hat(4)*Ts;
vy1 = x_hat(4) + (ky*x_hat(4)^2 - g)*Ts;
x_forecast = [x1; vx1; y1; vy1];
% 2 观测预测
r = sqrt(x1 * x1 + y1 * y1);
alpha = atan(x1/y1) * 57.3;
y_yuce = [r, alpha]';
% 状态矩阵
vx = x_forecast(2); vy = x_forecast(4);
F = zeros(4, 4); %雅克比矩阵
F(1,1) = 1; F(1, 2) = Ts;
F(2,2) = 1 - 2*kx*vx*Ts;
F(3,3) = 1; F(3,4) = Ts;
F(4,4) = 1 + 2*ky*vy*Ts;
Pkk_1 = F*Pk*F' + Qk;
% 观测矩阵
x = x_forecast(1); y = x_forecast(3);
H = zeros(2, 4);
r = sqrt(x^2 + y^2); xy2 = 1 + (x / y) ^2;
H(1,1) = x/r; H(1,3) = y / r;
H(2,1) = (1/y)/xy2; H(2,3) = (-x/y^2)/xy2; %转换矩阵
% 更新矩阵
Kk = Pkk_1 * H' * (H * Pkk_1 * H' + Rk)^-1; %卡尔曼增益
x_hat = x_forecast + Kk*(Z(k,:)' - y_yuce); %预测值校正
Pk = (eye(4) - Kk*H) * Pkk_1; %更新矩阵
X_est(k, :) = x_hat;
end
%% 作图
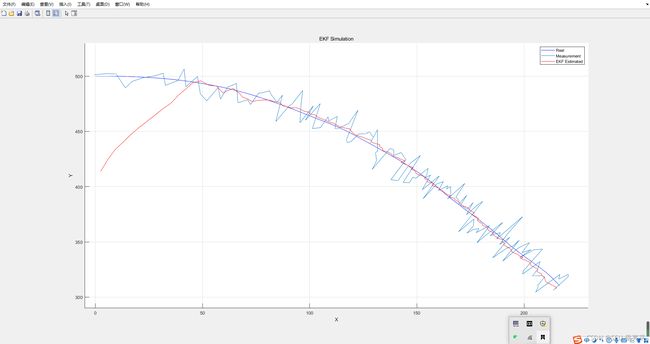
figure, hold on, grid on;
plot(X(:,1), X(:,3), '-b');
plot(Z(:,1).* sin(Z(:,2)* pi /180), Z(:,1).*cos(Z(:,2)*pi/180));
plot(X_est(:,1),X_est(:,3), 'r');
xlabel('X');
ylabel('Y');
title('EKF Simulation');
legend('Real', 'Measurement', 'EKF Estimated');
axis([-5, 230, 290, 530]);最后滤波的图像如下面所示